工業機器人路徑規劃及仿真
2019-10-21 10:12:43岳剛金鑫曹學坤
科技風 2019年6期
岳剛 金鑫 曹學坤
摘?要:對于類似筆形的工業機器人執行器,比如吸盤、氣爪、焊槍等,在示教編程作業時,經常會出現示教點高度不一致的問題,從而導致工具碰撞、軌跡深淺不一、路徑凌亂等問題。但是對于簡單任務,若采用離線編程,又浪費時間。在此以機器人寫字為例,討論運用RelTool功能,實現通過示教編程,實現書寫較標準文字的機器人編程方式。實踐證明,此方法能有效避免由于示教點不準造成的工具碰撞等問題。
關鍵詞:工業機器人;工具碰撞;示教編程
中圖分類號:TH122?文獻標識碼:B
Abstract:For pen-like industrial robot actuators,such as suction cups,gas claws,welding torches,etc,the height of teaching points is often inconsistent during teaching and programming operations,which leads to tool collision,different depth of trajectory and disordered path.But for simple tasks,offline programming is a waste of time.Taking the robot writing as an example,this paper discusses how to use RelTool function to realize the robot programming mode of writing more standard words through teaching programming.Practice has proved that this method can effectively avoid tool collision caused by inaccurate teaching points.
Key words:Industrial Robot;Tool Collision;Teaching Programming
隨著自動化和控制技術的發展,工業機器人作為中國制造2025中重點發展領域之一,在經濟生產領域應用廣泛,尤其是汽車行業,再加上近年來人力成本的上升,工業機器人產業和教育的發展越來越受到重視。
當前的職業院校基本已經完成了工業機器人專業建設,開始招生,有些先進的學校已經有了畢業生,不僅如此,本科院校也在積極參與工業機器人專業建設,但由于缺乏經驗,工業機器人專業人才培養的過程中,確實是摸索中前進。
在工業機器人實操與應用課程中,需要通過綜合實訓提升學生對技能的掌握程度,較常用的綜合實訓是機器人寫字。但在寫字時會遇到筆芯碰撞、軌跡深淺不一、字體凌亂等問題,針對此問題,展開了研究,找到了如下解決方案。
1 目標點建立步驟
1.1 RelTool指令
RelTool(Home,15,50,Height_H)
Home代表被偏移點的坐標,Home的數據類型應該為Robtarget,這樣才能夠依據不同的工件坐標系改變機器人的運動軌跡。
15代表X方向的偏移量為15mm,50代表Y方向的偏移量為50mm,Height_H代表在Z方向的偏移量為Height_H的值。
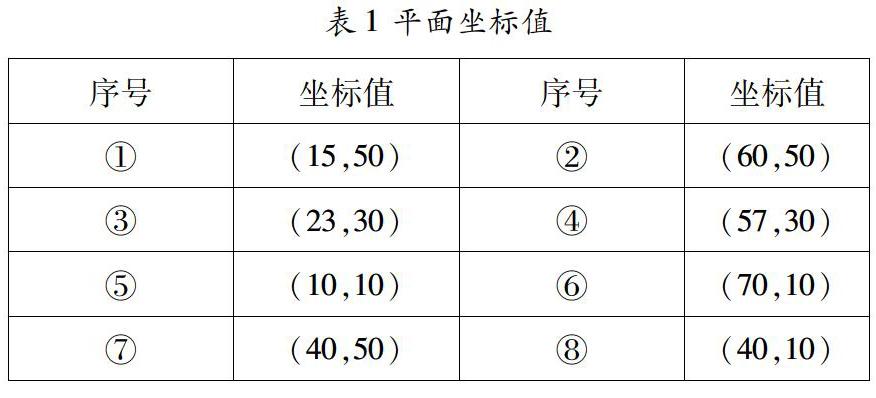
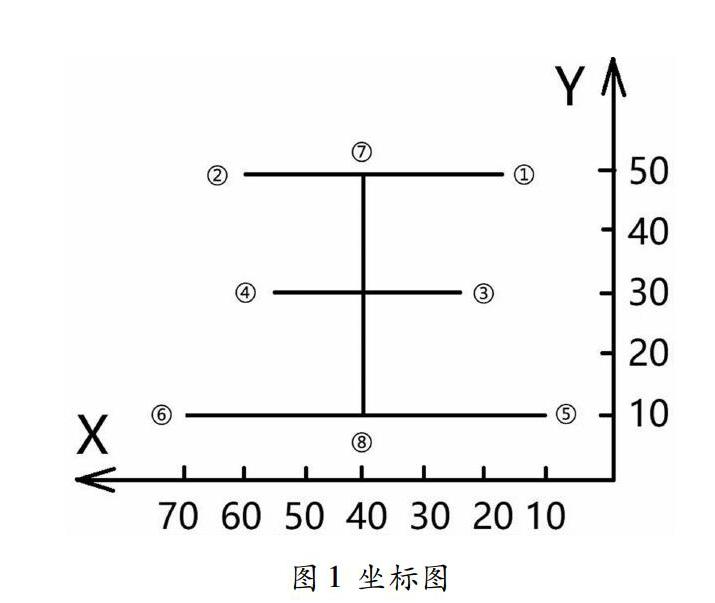
1.2 繪制目標文字的坐標圖
在白紙上書寫目標文字,然后在紙上建立坐標系,分別確定各目標點的坐標。平面坐標值如表1所示,坐標圖如圖1所示。
1.3 確認途徑點位
在寫字過程中,必然需要提筆與落筆,例如,機器人從點①運行到點②后,需要提筆,移動到點③的正上方,落筆到點③。所以需要確定各途徑點的高度,設為Height_H。
在實際運行中,由于紙面與機器人書寫筆之間的距離不定,所以需要在運行中調整,因此八個落筆點需要設定高度,設為Height_L。
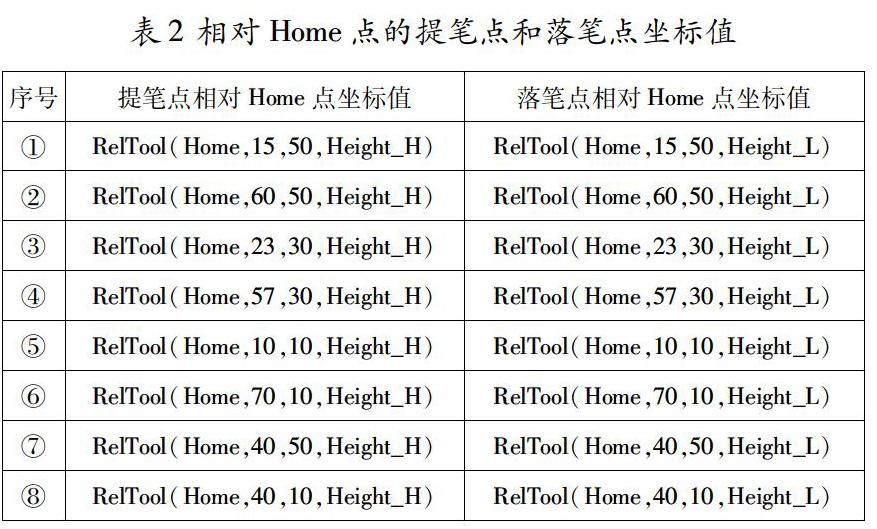
1.4 確定原點坐標
設原點目標點為Home,則機器人其他目標點的坐標值可推導為表2。這樣避免了逐點示教的繁瑣,也使得各點高度一致,避免字跡深淺不一的現象。
2 實操過程
2.1 程序編寫及仿真
在RobotStudio中,建立工業機器人工作站,按照設定好的軌跡點編寫程序,并完成仿真運行,編寫的程序如下:
PROC R_Write()
MoveJ RelTool(Home,0,0,Height_H),v1000,fine,tool0;
MoveJ RelTool(Home,15,50,Height_H),v1000,fine,tool0;
MoveL RelTool(Home,15,50,Height_L),v1000,fine,tool0;
MoveL RelTool(Home,60,50,Height_L),v1000,fine,tool0;
MoveL RelTool(Home,60,50,Height_H),v1000,fine,tool0;
MoveJ RelTool(Home,23,30,Height_H),v1000,fine,tool0;
MoveL RelTool(Home,23,30,Height_L),v1000,fine,tool0;
MoveL RelTool(Home,57,30,Height_L),v1000,fine,tool0;
MoveL RelTool(Home,57,30,Height_H),v1000,fine,tool0;
MoveJ RelTool(Home,10,10,Height_H),v1000,fine,tool0;
MoveL RelTool(Home,10,10,Height_L),v1000,fine,tool0;
MoveL RelTool(Home,70,10,Height_L),v1000,fine,tool0;
MoveL RelTool(Home,70,10,Height_H),v1000,fine,tool0;
MoveJ RelTool(Home,40,50,Height_H),v1000,fine,tool0;
MoveL RelTool(Home,40,50,Height_L),v1000,fine,tool0;
MoveL RelTool(Home,40,10,Height_L),v1000,fine,tool0;
MoveL RelTool(Home,40,10,Height_H),v1000,fine,tool0;
MoveJ RelTool(Home,0,0,Height_H),v1000,fine,tool0;
ENDPROC
仿真效果如圖2所示:
2.2 實際操作
將編好的程序用U盤導入到工業機器人示教器中,這時需要對工具坐標系、工件坐標系、示教點、Height_L和Height_H的值進行設定和匹配。
設定工具坐標系,工具坐標系標定工具TCP點的位置,因為實際機器人工具的形狀、TCP點Z軸的方向不同,所以需要重新標定。
設定工件坐標系,工作臺面通常與機器人底座存在一定夾角,即使看起來水平,但總會有傾斜,所以需要進行設定,以使所有點位的高度符合預期。
示教Home點的位置,Home點是所有軌跡點的參考點,需要尋找合適的位置進行示教,以保證其他軌跡點的正確性,一般Home點位于工作臺面的右下角。
通過調整Height_L和Height_H的值,實現書寫高度的控制,進而完成文字書寫。
首先設定Height_L=-50、Height_H=-50,之后運行程序,觀察程序運行軌跡是否符合預期,這時所有軌跡均在工作臺上方50mm處,故機器人工具不會與工作臺接觸,保證了試運行的安全。若整體軌跡不居中,則調整Home點的示教位置,直到居中為止。
之后將程序運行至第三行處,即:
MoveL RelTool(Home,15,50,Height_L),v1000,fine,tool0;
停止運行,這時打開示教器的手動操作頁面,記錄當前Z軸坐標,設為Z?0,切換到線性運動,手動移動機器人Z軸,直到工具TCP到達工作臺面,記錄當前Z軸坐標Z?1,計算二者差值△Z=Z?1-Z?0,此時Height_L=-50+△Z,這樣機器人工具TCP點就可以準確的到達工作臺面。
在實際運行中,若工作臺面水平度太差,超出了機器人筆尖的彈性范圍,可能會損壞筆尖,這時需要在實際工作臺面上建立工件坐標系,并修改程序中的坐標點位置。同時設定工件坐標系也適用于任意角度斜面上文字的書寫。
同時需要注意的是,Height_L和Height_H的變量類型都需要設定為常量,因為對于同一個工作臺面來講,高度值是確定的常數,并且常量在機器人中不會被清零,而建立程序數據時,默認的類型
3 結論
設計了文字書寫的工業機器人實訓項目的實施方法,通過此方法能避免筆芯碰撞、軌跡深淺不一、字體凌亂等問題。已經在實際中進行運用,效果良好。有效降低了工業機器人碰撞的發生率,延長了機器人使用壽命,降低了學習難度。此方法可以推廣至多種任務的編程過程中,例如焊接、碼垛、裝配等。
參考文獻:
[1]何勇,邵長偉,李剛.高職院校工業機器人專業課程教學方法設計[J].酒城教育,2017(04):25-29.
[2]王駿明.校企合作開發工業機器人實訓裝置的探索與實踐[J].計算機產品與流通,2017(07):161.
[3]張杰峰,劉傳勝.離線編程示教的工業機器人教學研究[J].裝備制造技術,2014(10):222-224.
[4]薛文平,李康吉.《工業機器人》實驗教學的改革與實踐[J].實驗科學與技術,2014,12(01):49-51.
[5]類延超.五自由度寫字機器人系統研究[D].山東大學,2012.