Pix4Dmapper和Agisoft PhotoScan兩款軟件的對比分析
2019-10-21 04:16:11李昊
科技風 2019年20期
關鍵詞:數據處理
李昊
摘 要:航測無人機能夠獲取超高分辨率數字影像和高精度定位數據,生成地表三維模型(DSM)、三維正射影像圖(DOM)、數字高程模型(DEM)和三維點云模型等數據。在實際工作中有許多處理無人機影像數據的軟件,本文就以PIX4DMAPPER和 PhotoScan1.2.5 兩款較成熟的軟件,通過處理某測區影像數據,對其正射影像成果進行對比分析最后了解各軟件的特點。
關鍵詞:航測無人機;PhotoScan1.2.5;PIX4DMAPPER;數據處理
一、軟件介紹
Pix4d mapper軟件是由瑞士一家Pix4D公司研發出來的,它是一款全自動、快速、專業精度為一體的無人機數據和航空影像數據處理軟件。它可以利用無人機獲取的影像數據生成3D點云、DSM、DOM等高精度的成果。
PhotoScan1.2.5 可生成高分辨率真實坐標的正射影像(使用控制點可達5cm精度)及帶有詳細彩色紋理的DEM模型。完全自動化的工作流程,可以在一臺電腦上處理成百上千張航空影像,生成專業級別的攝影測量數據。
二、數據處理介紹
(一)測區及無人機概述
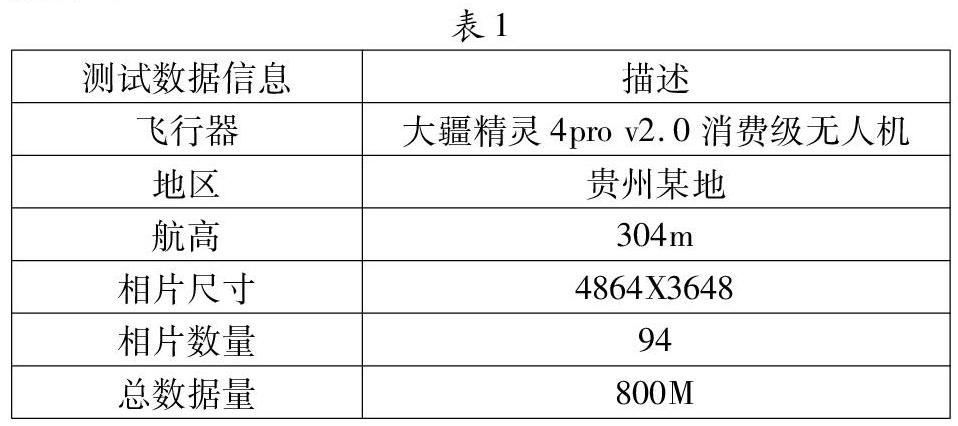
通過大疆無人機獲取某測區的正射照片,然后通過這兩款軟件對其獲取照片進行處理,最終得到該區域的高清正射影像圖。試驗區域面積為1平方千米左右,無人機飛行一架次,共計3條航線。航向為自北到西南方向、西南方向到東南方向、東南向到北方向,整體呈三角形狀。全程采用DJI-FC6310S照相機拍攝照片94張,相片尺寸大小為4864*3648。詳細信息見表1:
兩款軟件在同一臺電腦上運行。電腦配置為:處理器:Intel(R)Core(TM)i7-6700K;安裝內存為16G;操作系統為Windows7 旗艦版。
(二)Pix4D Mapper處理數據流程
原始資料準備→工程建立→初始化處理→空三加密→成果生成導出。簡單操作,可以快速進行影像的拼接。
它具有以下幾個特點:
(1)操作簡單、容易掌握,在預處理好原始數據之后,其他處理工作非常簡單,很容易完成。
(2)支持一鍵式獲取結果的模式,實現最大自動化處理功能。
(3)對工作站配置要求較高,且運行時間長,如果工作站配置不高,可能需要一天甚至數天才能完成一架次數據的處理。
(4)成圖質量較高,但精度不高,往往需要根據控制點的坐標進行校正,但是改善高程精度的問題需要進一步研究。
(三)PhotoScan1.2.5處理數據流程
數據準備→對齊照片→建立密集點云→生成網格→Build Orthomosaic→導出成果
它具有以下幾個特點:
(1)可以處理任意無人飛行系統獲取的數據,涉及面廣、普適性強。
(2)軟件便攜,處理時間短、效率高、成圖迅速,只需一臺高配工作站即可實現現場處理。
(3)數據成果包括空三成果、DSM和DOM,直觀簡潔。
(4)處理成果誤差較小、拼圖容易進行、成果圖范圍大,但正射影像中缺陷較多,圖像質量一般。
三、處理結果對比
(一)相同點
Pix4Dmapper1.1.38和 PhotoScan1.2.5 它們具有以下幾點共性:
(1)都可以自動化地完成無人機數據的快拼處理;
(2)都具備相機的自檢校能力;
(3)都支持任意航跡飛行的無人機影像處理;
(4)都可以生成精細高程數據。
(二)不同點
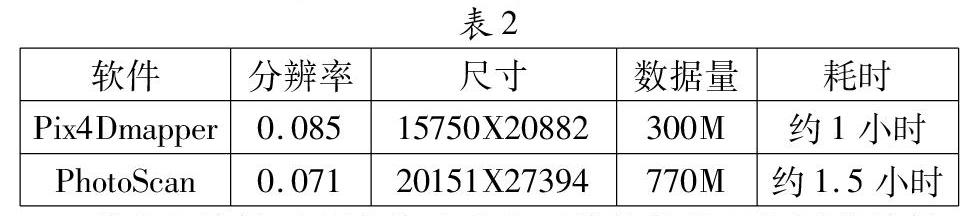
經過兩款軟件分別處理以后,結果對比如下表2:
從以上數據可以清楚地看出兩款軟件處理相同的數據,Pix4Dmapper在處理時間上占優勢,僅用了一個小時,且生成正射像片的數據內存量是300兆。雖然Pix4Dmapper在處理效率上處于領先地位,photoScan軟件處理以后的正攝照片分辨率是0.071,比起Pix4Dmapper處理的正射像片分辨率要高。
圖像畸變大小對比:現在取兩張正射相片相同位置的影像,通過“公路”畸變的程度來判斷兩張正射影像整體畸變的情況。選取的位置要均勻分布至整個影像。現選取某處如下圖對比:
通過對比photoScan軟件處理后的正射影像的畸變程度要比Pix4dmapper軟件處理得到的影像要小。
四、結論
隨著無人機航測技術的不斷發展,在諸多領域得到了廣泛的應用。尤其是在地理條件復雜,人工難以到達或者無法到達的地方,無人機航測技術就更能展現它的工作能力。通過此篇文章可以看出兩款軟件在處理無人機數據時photoscan這款軟件雖然用時較多但分辨率高、畸變小;而Pix4dmapper在處理數據時用時少,效率高可以快速的完成快拼工作。因此在實際工作中我們可以根據自己的需求去選擇合適的軟件。
參考文獻:
[1]施以兵.基于Pix4Dmapper無人機航測數據處理[C].江蘇省測繪地理信息學會2016年學術年會論文集,2016.
[2]歐軍.無人機航測內業數據處理技術研究[J].科技資訊,2017,15(27).
猜你喜歡
中學生數理化·自主招生(2022年9期)2022-05-30 10:48:04
心理學報(2022年4期)2022-04-12 07:38:02
水泵技術(2021年3期)2021-08-14 02:09:20
電子測試(2018年4期)2018-05-09 07:28:12
當代化工研究(2016年9期)2016-03-20 16:22:13
中國慣性技術學報(2015年1期)2015-12-19 13:12:17
計算機工程(2015年4期)2015-07-05 08:28:04
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:22
聯合國青年技術培訓(2014年7期)2014-04-12 00:00:00
中國質量與標準導報(2014年7期)2014-02-28 22:24:35