分層規(guī)則式混動客車再生制動控制策略研究
2019-10-21 17:12:09李子龍李夢園
科技風 2019年2期
李子龍 李夢園
摘 要:混動客車的再生制動技術是提升其經濟性的主要技術之一。但是,如何與傳統(tǒng)的液壓(氣壓)制動系統(tǒng)相結合,同時保證整車穩(wěn)定性和最優(yōu)經濟性仍然是一個亟待解決的難題。針對該難題,提出了一種基于滑移率的分層規(guī)則式再生制動控制策略。首先搭建了一個7自由度縱向動力學模型;然后基于前后輪的滑移率設計了常規(guī)、過渡和緊急制動三層控制策略,最后對該控制策略進行了模型仿真實驗,實驗結果表明在保證整車安全性的同時,該策略相對于標準工況下常規(guī)的再生制動策略,能夠提升15%的制動回收能量。
關鍵詞:混合動力客車;分層規(guī)則式;再生制動控制
中圖分類號:TP29文獻標識碼:A
隨著我國汽車總量逐漸增多,傳統(tǒng)汽車所帶來的環(huán)境污染和資源短缺問題也日益嚴峻 [1,2]。針對該問題,節(jié)能環(huán)保的電動汽車技術成為主流發(fā)展車型。
1 緒論
針對電動汽車制動過程中的再生制動系統(tǒng)控制問題,國內外學者已經做了大量的研究。
張俊智等以混動城市客車為研究對象,設計了一個新型再生制動系統(tǒng),并提供了其相應的控制策略,[2]并針對串聯(lián)式混動客車,設計了多種控制策略,并對這些策略進行了道路測試實驗驗證。[3]
童毅等基于并聯(lián)式混動汽車,提出一種轉矩管理和協(xié)調控制策略,并通過DSPACE設備對該策略的有效性進行了實時仿真驗證。[4]
針對制動能量回收問題,羅禹貢等人基于最優(yōu)控制理論,設計了再生制動控制策略,[5]詹訊等分析了混動汽車在城市環(huán)境下的行駛特點,設計了一種規(guī)則式制動力分配策略,[6]并對其進行了仿真驗證。
楊陽等基于混動汽車,設計了其綜合制動系統(tǒng),并基于AMESim仿真軟件建立了仿真模型,通過該模型對系統(tǒng)方案的有效性進行了驗證,[7]劉清河等人在傳統(tǒng)汽車制動系統(tǒng)基礎上,設計了一種電機制動和液壓機械制動的并行系統(tǒng)構型,并基于該構型提出了集成制動控制策略。[8]
基于電動汽車,郭洪強等[9]綜合考慮制動能量回收效率與車身行駛穩(wěn)定性,設計了基于二次再分模型的優(yōu)化控制策略。郭志軍等[10]在考慮制動力安全分配區(qū)域與法規(guī)的前提下,設計了基于模糊邏輯的再生制動控制策略。
李強等基于路面附著系數(shù)識別,設計了一種再生制動控制策略,在綜合考慮路面情況下,盡可能的回收制動能量[11]。秦大同等考慮了電池,電機和變速器的綜合效率,設計了無級變速器速比控制策略,并基于該策略,制定了兼顧駕駛意圖和能量回收效率的再生制動策略[12]。何耀等[13]將電機和電池的限制因素考慮在內,提出一種信息融合架構和基于該架構的再生制動控制策略。
基于上述調研,本文針對同軸并聯(lián)混合動力客車構型,提出了一種基于滑移率的分層規(guī)則式再生制動控制策略。
2 整車模型
基于同軸并聯(lián)機電傳動系統(tǒng),本文提出了一種基于滑移率的分層規(guī)則式再生控制策略。
混動客車的制動系統(tǒng)由氣壓機械制動系統(tǒng)和再生制動系統(tǒng)組成,本文所選擇的氣壓制動系統(tǒng)為電控系統(tǒng),其中前后輪的輪缸氣壓可以實現(xiàn)獨立控制[14]。
為了驗證所提出的控制策略,建立考慮縱向行駛動力學和懸架的七自由度整車動力學模型,傳動系統(tǒng)的其它部件模型如電機發(fā)動機模型等可以參考文獻14[14]。
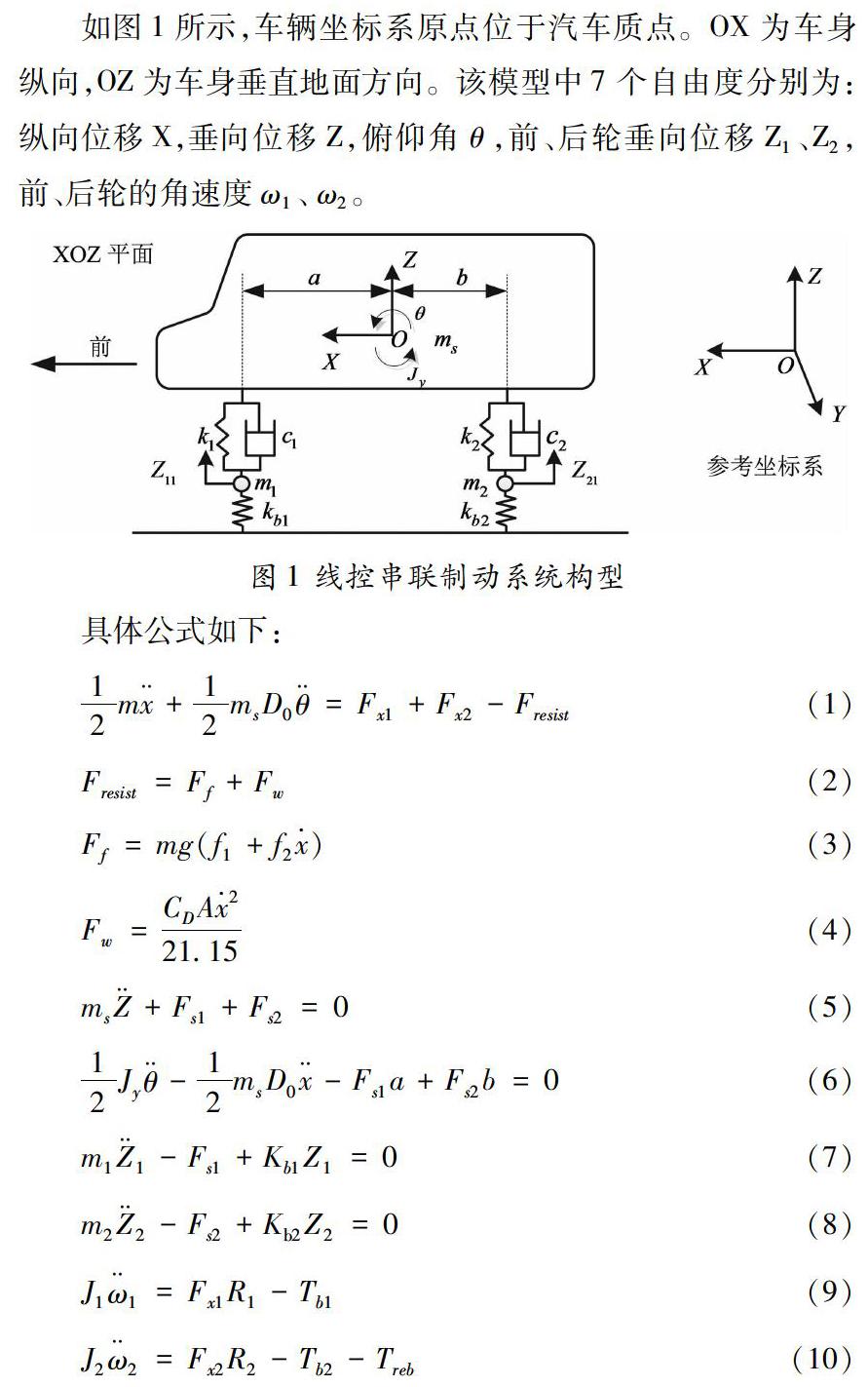
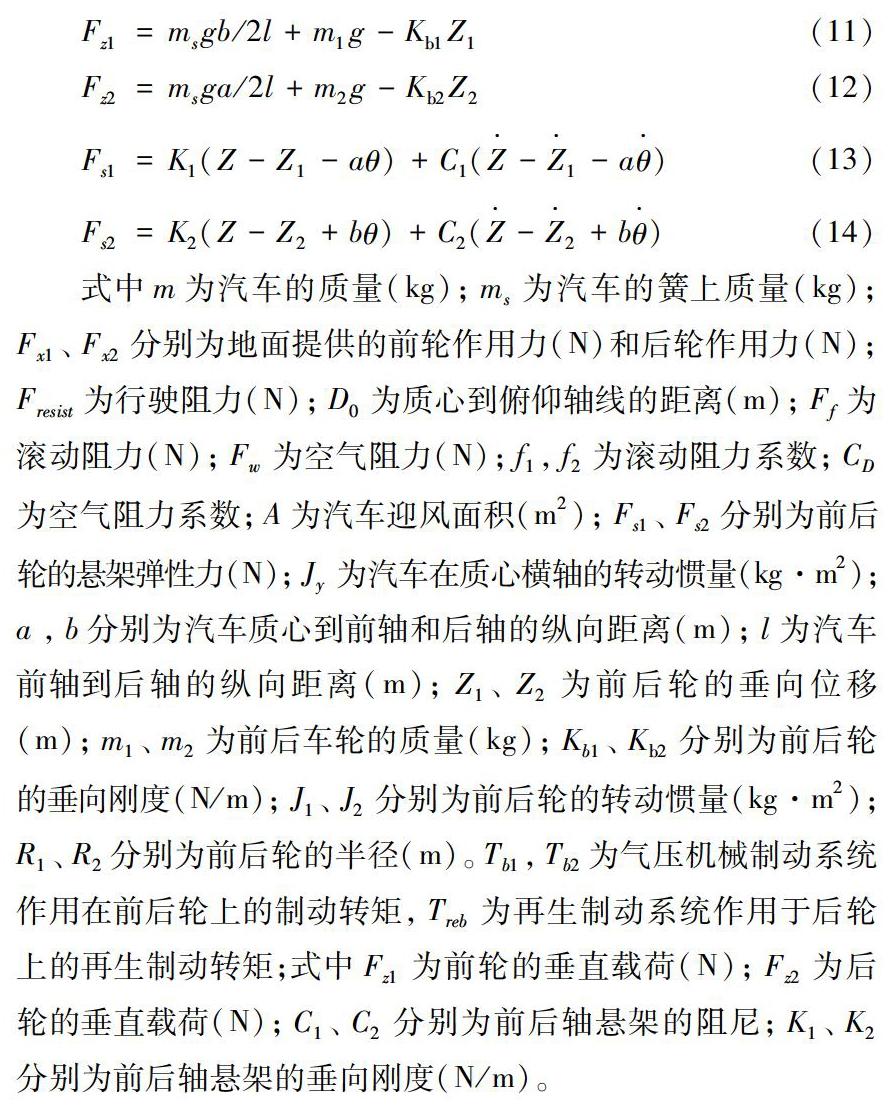
如圖1所示,車輛坐標系原點位于汽車質點。OX為車身縱向,OZ為車身垂直地面方向。該模型中7個自由度分別為:縱向位移X,垂向位移Z,俯仰角θ,前、后輪垂向位移Z1、Z2,前、后輪的角速度ω1、ω2。
3 基于滑移率的分層規(guī)則式再生制動控制控制策略
針對串聯(lián)式混合制動系統(tǒng),多數(shù)規(guī)則式控制策略是單純基于駕駛員制動需求對前后軸上的制動力進行成比例的分配,本文提出一種基于滑移率的多模式規(guī)則式再生制動控制策略,基于前后輪滑移率將制動情況分為三個層級,并在每個模式中設計了相應規(guī)則,以達到在保證整車安全性的同時提升制動能量回收效率的目的。
如圖2所示,圖中滑移率為前后輪滑移率較大者,d為考慮了制動減速度導致的負載轉移后的前后輪負載比例。
常規(guī)制動層,當前后輪的滑移率均小于L1時啟動常規(guī)制動層,在該層控制策略的主要目的是回收制動能量,此時駕駛員制動需求首先由電機的再生制動力提供,若再生制動力不足以滿足制動需求,則由前后輪氣壓機械制動力補充。
過渡制動層,當前后輪滑移率至少有一個超過L1,但均未超過L2時過渡層啟動,在該層控制策略的主要目的包括回收制動能量以及盡可能的不觸發(fā)防抱死模式,前后輪制動力的分配比例由后輪滑移率決定,如圖所示,后輪滑移率越大,后輪制動力的分配比例越小,最后前后輪的分配比例接近其前后軸上的負載比例。同樣,分配的后輪制動力首先由再生制動力提供,當再生制動力不足以滿足要求時,由氣壓機械制動力補償。
緊急制動層,當前后輪滑移率至少有一個超過L2時啟動緊急制動層,在該層控制策略的主要目的是將滑移率控制在最優(yōu)滑移率附近,防止車輪抱死,保證整車的制動效能和安全性,如圖3所示,此時對前后輪分別設計PID控制器進行控制,以目標滑移率和當前滑移率的偏差為輸入,以基于當前制動力的修正制動力為輸出,對于后輪,利用電機響應較快的特點,盡可能讓氣壓機械制動系統(tǒng)提供基本制動力,再生制動系統(tǒng)在此基礎上提供需要快速響應的修正制動力。
4 仿真結果分析
為了驗證所提出控制策略制動安全性以及能量回收效率,本文以并聯(lián)式混合制動系統(tǒng)的基本控制策略為基準策略,[3]進行了仿真對比實驗。
制動能量回收效率的仿真工況設置為中國國家標準工況,驅動過程采取的是常用的基于規(guī)則式策略[14]。
仿真結果如圖4,5所示,在圖(a)中可以看出,兩種策略的車速跟隨效果都很好,實際車速和期望車速幾乎重合。如圖(c)所示,由于整個工況沒有緊急制動情況,所以車輪滑移率在0.1以內,符合安全性的要求。最后如圖(d)所示,基準策略回收制動能量為4702.2kJ,而本文所提出的控制策略回收制動能量為5406.8kJ,相對于基準策略提升15.19%,從而驗證了提出的策略的制動能量回收效率。
5 結論
本文提出了一個基于滑移率的分層規(guī)則式再生制動控制策略。首先,綜合考慮懸架特性及行駛過程負載轉移,建立了7自由度整車縱向動力學模型;其次,基于前后輪的滑移率,設計了分層規(guī)則式再生制動控制策略;最后以并聯(lián)式混合制動系統(tǒng)的制動策略為基準控制策略,對所提出的控制策略做了仿真對比試驗,仿真實驗結果顯示在國家標準工況下,分層規(guī)則式再生控制策略能夠在保證安全性的同時,提升15%的制動回收能量。
參考文獻:
[1]科學技術部.這十年——現(xiàn)代交通領域科技發(fā)展報告[M].北京:科學技術文獻出版社,2012:6-62.
[2]張俊智,薛俊亮,陸欣,等.混合動力城市客車串聯(lián)式制動能量回饋技術[J].機械工程學報,2009,45(6):102-106.
[3]張俊智,陸欣,張鵬君,等.混合動力城市客車制動能量回收系統(tǒng)道路試驗[J].機械工程學報,2009,45(2):25-30.
[4]童毅,歐陽明高,張俊智.并聯(lián)式混合動力汽車控制算法的實時仿真研究[J].機械工程學報,2003,39(10):156-161.
[5]羅禹貢,李鵬,金達鋒,等.基于最優(yōu)控制理論的制動能量回收策略研究[J].汽車工程,2006,28(4):356-360.
[6]詹訊,秦大同,楊陽,等.輕度混合動力汽車再生制動控制策略與仿真研究[J].中國機械工程,2006,17(3):312-324.
[7]楊陽,劉松,秦大同,等.ISG型混合動力汽車制動系統(tǒng)仿真分析[J].重慶大學學報,2009,32(7):752-756.
[8]劉清河,孫澤昌,王鵬偉,等.電動汽車電液并行制動系統(tǒng)研究[J].汽車工程,2008,30(6):527-530.
[9]郭洪強,何洪文.電動汽車復合制動預測模型[J].吉林大學學報,2015,3:696-702.
[10]郭志軍,岳東東,聶彥鑫.純電動汽車再生制動控制策略研究[J].機械設計與制造,2018,1(1):173-176.
[11]李強,雷國建,陶華堂.回饋能量可控型再生制動控制策略研究[J].電氣傳動,2017,47(1):13-17.
[12]秦大同,林旈培,胡建軍,等.基于無級變速器速比控制的插電式混合動力汽車再生制動控制策略[J].吉林大學學報(工學版),2018,48(2):380-386.
[13]何耀,邱振華,劉新天,等.信息融合架構下的新型再生制動控制策略研究[J].控制與決策,2018,33(7):1231-1238.
[14]張淵博.混合動力客車制動能量回收模型預測控制策略研究[D].河北:燕山大學,2017.