一種磁吸附式微小型慣性粘滑運動平臺研究
2019-10-22 09:27:16鐘博文王振華孫立寧
壓電與聲光 2019年5期
劉 彬,鐘博文,王振華,孫立寧
(蘇州大學 機電工程學院,江蘇 蘇州 215000)
0 引言
慣性粘滑驅動以其運動范圍大,分辨率高,集成度高及運動速度快等優點,在顯微系統、光學調整、微納操作系統及微裝配系統等領域獲得了廣泛的應用[1-5]。目前,國內外對設計慣性粘滑驅動結構已有研究成果。溫建明等[6]提出了一種通過控制機構與支撐面之間的摩擦慣性粘滑運動機構,機構主體尺寸為25 mm×25 mm×20 mm,步長分辨率為7.5 μm,最大負載可達200 g。Attocube System公司[7]研發的單自由度運動平臺,總體尺寸為24 mm×24 mm×11 mm,行程范圍為0~5 mm,最大運動速度為3 mm/s,最小分辨率為10 nm。李宗偉[8]設計了一種使用O型圈來調節摩擦力的慣性粘滑平臺,總體尺寸為30 mm ×28 mm ×25 mm,平臺分辨率達到4 nm,最大運動速度為14 mm/s。于淼[9]研究了一款基于調節螺栓與O型圈相結合的摩擦力調節的運動平臺,水平方向單自由度樣機尺寸為24 mm×24 mm×16.5 mm,正、反向最大運動速度可達2.7 mm/s和2.0 mm/s。通過對前人的結構設計總結分析發現,目前樣機的結構設計存在結構整體尺寸偏大問題,限制了慣性粘滑運動在小空間的應用。本文在慣性粘滑驅動原理基礎上設計了一款運動平臺,通過優化質量配比,在保證運動平臺高精度的同時,整體尺寸較小,在小空間內能實現高精度位姿調整。
1 慣性粘滑運動平臺結構設計
通過對慣性粘滑原理的分析,壓電陶瓷致動器用于提供微位移,滑塊通過摩擦界面動靜摩擦的狀態變化實現“粘”與“滑”的狀態。為了優化樣機整體尺寸,本文設計的小型慣性粘滑運動平臺采用無導軌式的設計,主要由外框架、底板、吸鐵石和壓電陶瓷等組成,如圖1所示。
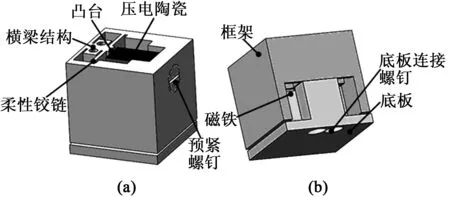
圖1 平臺結構三維模型圖
圖1中,外框架將慣性部分、柔性鉸鏈和滑塊部分通過集成方式減小了整體尺寸,其中慣性部分與滑塊部分的相對運動依靠柔性鉸鏈的變形來實現。預緊螺釘給壓電陶瓷提供了一定的預緊力,起到固定與保護壓電陶瓷的作用。將吸鐵石粘貼在外框架內部,在提供吸附力的同時,能增大慣性部分質量。凸臺結構是為了避免壓電陶瓷端面對柔性鉸鏈變形造成干涉,影響慣性粘滑運動性能。安裝壓電陶瓷的空間除了要考慮其自身的體積,還要考慮其焊點與輸出線的尺寸。因此,選擇階梯式空間是便于加工與安裝。結構底板使用碳鋼材料,摩擦界面進行拋光處理,盡可能保證摩擦的一致性。
2 柔性鉸鏈的優化與平臺性能的分析
2.1 柔性鉸鏈的優化
柔性鉸鏈[10-11]以其具有無回程間隙、無機械摩擦等優點而被廣泛應用于實現微小位移運動,微小轉動等高精度定位中。在慣性粘滑運動中,為了實現無間隙傳動與傳遞壓電陶瓷的直線運動,且保證壓電陶瓷輸出位移的方向性,本文選擇使用雙平行板直梁型柔性鉸鏈。
柔性鉸鏈作為傳動機構,其結構設計對慣性粘滑運動平臺至關重要。為了方便結構的建模與分析,將中間部分看作剛體,如圖2所示。圖中,h,t,l分別為雙平行板柔性鉸鏈的寬度,厚度和長度,力F為壓電陶瓷的安裝位置,產生的位移與力通過柔性鉸鏈進行傳遞。

圖2 平行板柔性移動副力學模型
根據撓曲軸微分方程:
(1)
式中:w為在F作用下的位移量;M(x)為F作用下的彎矩;I為鉸鏈截面的慣性矩;E為材料的彈性模量。
直梁AB在外力F/4作用下,端面B的轉角:
(2)
直梁AB在力矩M作用下,端面B的轉角:
(3)
在基本靜定系下,端面B的轉角為0,因此在端面B變形的協調條件為
θ1+θ2=0
(4)
因此,端面B鉸支約束作用于直梁的力矩為
(5)
直梁AB的端面B撓度為
(6)
式中I=ht3/12,則平行板柔性鉸鏈的水平剛度為
(7)
2.2 柔性鉸鏈的有限元分析
為了能夠對柔性鉸鏈的性能有更深了解,本文使用有限元分析軟件Simulation對其進行分析與校核。首先,使用SolidWorks軟件繪制成三維模型圖,導入到Simulation軟件中進行網格劃分。然后按照慣性粘滑運動平臺的實際運動情況添加約束,并添加外力載荷或位移來代替壓電陶瓷的實際輸出力或輸出位移量。最后通過有限元分析獲得慣性粘滑運動平臺中柔性鉸鏈的剛度、強度和固有頻率等參數。
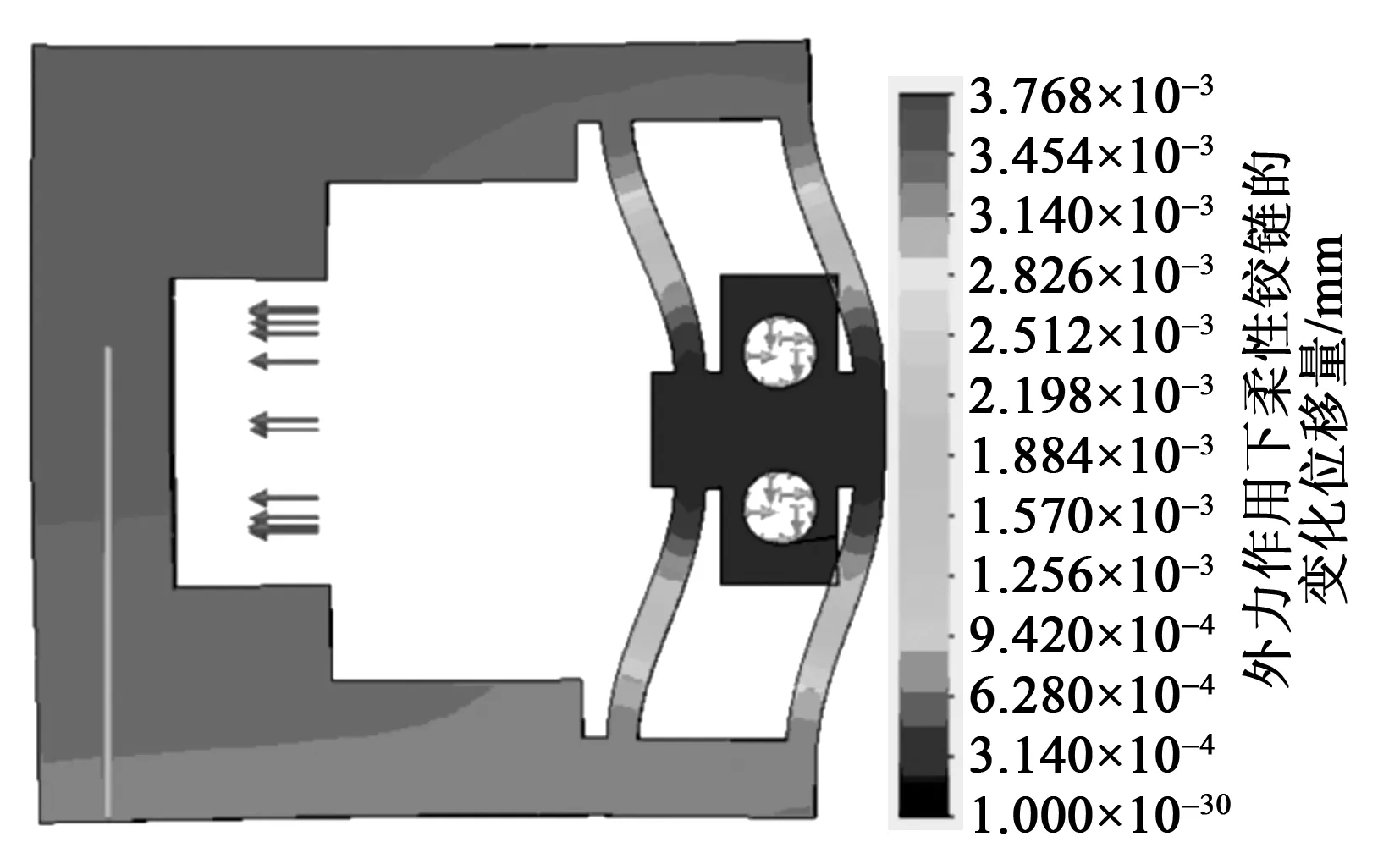
圖3 柔性鉸鏈剛度校核圖
通過理論計算與有限分析的結構進行綜合分析,柔性鉸鏈最終尺寸:l=3.25 mm,t=0.4 mm,h=5 mm。經過理論分析計算,該尺寸下柔性鉸鏈剛度為7.233 N/μm。有限元分析是將橫梁結構添加約束,使用25 N外力代替壓電陶瓷輸出力,校核得到剛度為6.635 N/μm,對比有限元分析柔性鉸鏈的變形量與理論計算柔性鉸鏈的變形量相差8.27%,驗證了理論分析的正確性。
3 實驗及驗證
3.1 實驗系統搭建
測試慣性粘滑運動平臺的性能,利用CapaNCDT6300電容測微儀測量滑塊的微小位移。由于電容測微儀量程范圍有限,為了使數據更具說服力,每個數據點測量30次,取平均值。驅動機構的測試系統組成如圖4所示。
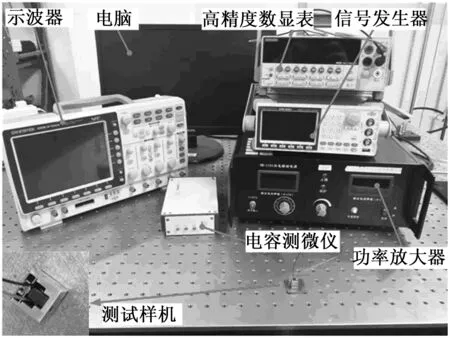
圖4 測試系統圖
3.2 步長重復性測試
慣性粘滑運動具有納米級分辨率,毫米級行程,因此,在高精度操作領域有廣泛應用,而步長重復性是評價樣機精度的重要指標。
測試時,驅動電信號幅值為150 V,頻率為2.5 kHz,取往復步距10個數據點繪制圖表,結果如圖5所示。正向運動的步長平均值為2.984 μm,極差為0.34 μm,方差為0.118 4 μm,反向運動的步長平均值為2.349 μm,極差為0.32 μm,方差為0.105 4 μm。由圖5可看出,樣機具有良好的位移重復性,且樣機正、反向位移量不同,這是由于復雜的摩擦狀態引起的。
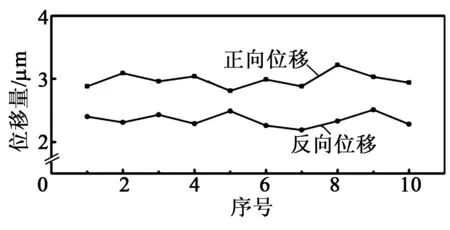
圖5 步長重復性測試
3.3 運動速度測試
運動速度是樣機性能指標的重要參數。圖6為不同電壓幅值下的運動速度。圖7為不同驅動頻率下的運動速度。由圖7可看出,平臺最大運動速度為4.966 mm/s。運動速度是由單步位移與驅動頻率匹配得到的,當驅動頻率提高時,由于滑塊在“粘”狀態轉變成“滑”狀態,導致單步位移減小,所以導致運動速度與驅動頻率呈現倒U曲線關系。

圖6 不同電壓幅值下的運動速度
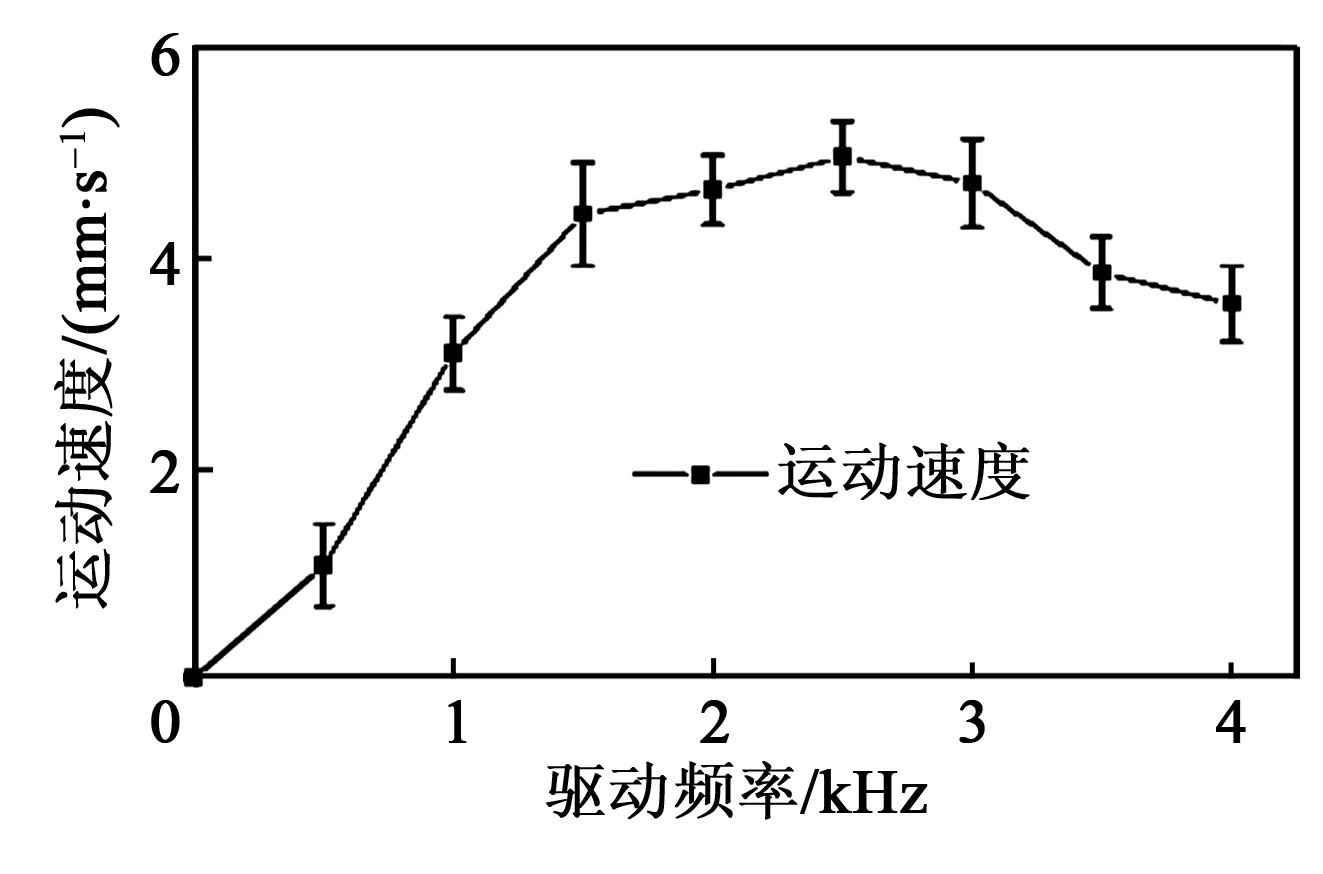
圖7 不同驅動頻率下的運動速度
4 結束語
本文設計了一款體積僅有10 mm×10 mm×10 mm的微小型慣性粘滑運動平臺,能夠滿足在狹小空間內實現高精度的位姿調整。搭建實驗測試系統結果表明,運動平臺的正、反向單步位移分別為2.984 μm和2.349 μm,步長重復性好,水平方向最大的運動速度為4.966 mm/s,豎直方向上運動速度可達2.1 mm/s,能實現快速的位姿調整。通過對該平臺的研究,為小體積的多自由的平臺設計提供了指導。
