微型逃生電動車用升降裝置結構設計及仿真分析*
2019-10-23 07:07:26鄭志紅陳智勇黃曉婧劉建壽李彬李妙玲姚永玉張廣廣
汽車實用技術 2019年19期
鄭志紅,陳智勇,黃曉婧,劉建壽,李彬,李妙玲,姚永玉,張廣廣
(1.洛陽理工學院 機器人學院,河南 洛陽 471023;2 洛陽理工學院 機械工程學院,河南 洛陽 471023; 3.中國航空工業集團公司 洛陽電光設備研究所,河南 洛陽 471009)
1 設計背景
近年來,隨著經濟快速發展、科學技術的加速進步,住宅用土地供應日益緊張,城市中高層建筑的數量以一種空前的速度增長。伴隨該現象而產生的問題隨著而來,特別是發生規模較大的火災時,如果因為斷電導致電梯井無法正常運行,較高層數的住戶無法及時逃離火災現場,火災勢必會對住戶造成非常嚴重的人身安全和財物損失,同時因高層建筑區建筑密集、住戶較多,道路比較窄、地面車輛停放多等實際情況,導致火災后的及時救援工作面臨很大的困難。
針對上述問題,結合電動車逐步普及的現狀,根據國內現有的技術水平,設計一款剪叉式液壓升降平臺,從而實現高層建筑區內的快速搶險救援。優選了液壓升降平臺結構材質,確立了支撐底座、液壓支撐臂布局,設計了剪叉結構傳動裝置,得到了一種質量輕、體積小、可折疊的升降裝置,可搭載在小型電動車上移動和升降,經過ANSYS 受力分析計算,驗證升降裝置能夠滿足設計指標要求。
2 升降裝置結構方式的確定
升降機構既要滿足升降臺快速平穩升降,又要保證工作時的穩定性和移動時的靈活性,還需要具備結構緊湊、體積小、操作簡單、承載量大、有著較強的驅動通過性、以及其上升及下降易操縱的特點,這就對結構形式選擇、材料選用、具體結構布局以及承受力等方面提出較高的要求。
2.1 升降裝置結構的基本要求
本設計的主要目的是設計一款能在居民密集度高的高層住宅區進行人員營救,這就要求上裝升降裝置體積小、操作簡單靈活。
然后在救生過程中要上下、左右移動,升降裝置必須保證其升降移動和水平移動的穩定性和速度性。
最后救援時被救生人員位于頂部的救援平臺,升降裝置的支撐部位在重力作用下,如果剛度、強度過低,升降裝置的支撐部位將發生大變形,甚至傾斜損壞,將給救援帶來新的危險,因此升降裝置的支撐結構應具有足夠的剛度和強度。
2.2 升降結構型式的選擇
對比分析眾多升降機構的設計方案,綜合考慮尺寸要求、所配合裝載的車輛使用要求,剪叉式升降機構相比其他柱塞式、絲杠式、齒輪齒條式升降機構,有著體積小、操作簡單、穩定性好、結構緊湊、承載量大、驅動通過性強、以及上升下降易操縱的特點,所以本方案選擇剪叉式升降機構。剪叉式升降機構升降的實現是其將液壓缸活塞桿的往復運動轉換成了橫臂的移動,橫臂的移動又進一步轉成了叉臂的升降運動,從而實現整個升降平臺的舉升與降落。
同時考慮到該機構的自重以及為了滿足救援目的,平臺設計時應考慮負載時整體結構的受力情況,若要實現其上升和下降過程,需要有較大的推力和拉力來驅動,而在眾多驅動方式中,可選的電動和氣動受使用場地和動力的局限,綜合考慮選擇液壓驅動。
2.3 材料的選擇
升降裝置結構性能的優劣在很大程度上取決于材料的性能,為此,首先應結合剪叉型結構形式合理選擇材料,進而達到機構的最優性能。考慮升降裝置的特殊功能需求和可供性、價格等因素影響,對比分析多種材料,如Q235、Q345、鋁合金、Mg-Al 合金、鈦合金等,綜合考慮選定液壓升降平臺主要采用Q345 和Mg-Al 合金兩種材料,其材料屬性見表1。

表1 材料屬性
3 升降平臺設計
3.1 臂架計算
一層升降平臺的臂架由四根支撐臂和三根橫梁組成。
根據任務要求,初定支撐臂長度L0為1 米,令其升起到極限位置時同側兩支撐臂之間較小的夾角的角度α 為60 度,則完全升起時每層高度H1為:

在不考慮底座和頂部救援平臺兩部分高度的情況下,若要滿足總高(H)為15m 的設計要求,一共需要的層數(n)為:

考慮升降平臺裝載在車廂上,以及底座和頂部救援平臺的高度,圓整n,取n 為17。
17 層臂架折疊后高度不能超過600mm(即為0.6m),則每層臂架的高度(H2)應為:

由于剪叉機構呈對稱布置,則每根支撐臂的高度(H3)應小于等于0.017m,為了給剪叉機構的底座和上部平臺在高度上留充足安裝余量,取H3為0.015m。
臂架材料選取時考慮控制重量,選用Mg-Al 合金,且為中空設計,橫梁橫截面為圓環,D 為外徑,d 為內徑。彎曲正應力的強度條件為:

最大彎矩:

圓環抗彎截面系數:

因所設計的橫梁與支撐臂接觸位置較為復雜,則暫定其厚度為30mm,初步將支撐臂輪廓尺寸定為長×寬×高=1000mm×30mm×80mm,該尺寸會根據ANSYS 結果進行優化。
3.2 頂部救援平臺設計
由于尺寸限制,同時考慮到在極限位置時,如果剪叉機構與救援平臺相連的固定端橫梁距離太過靠近邊緣,相對來說容易造成平臺變形甚至傾倒,為了使平臺穩定,在設計時改變固定端與較近一側邊緣的位置,令臂架整體較為靠近中間位置。設計平臺底部輪廓尺寸為長×寬×高=1500mm×800mm×200mm。
為了保證救援安全、方便,安裝升降平臺防護裝置必不可少,初步設計在救援平臺四周安裝防護欄,并在救援平臺一側設計一梯子,救援平臺三維模型如圖1 所示,其中護欄結構形式可多樣化設計,并不局限于圖中顯示結構形式。

圖1 救援平臺三維模型
3.3 底座設計
由于整個剪叉機構和救援平臺均依靠底座來約束限制自由度,則底座的設計一定要滿足以下條件:可以為整個系統提供穩定支撐,與車身相連保證穩定,對剪叉機構的行程進行限制,裝布置液壓驅動機構以及操縱機構等。
設計其輪廓尺寸長×寬×高=1200mm×1000mm×150mm。為了方便裝配,底座一端有可拆卸擋板,通過螺釘與底座相連,螺釘有定位及緊固作用,底座三維模型如圖2所示。
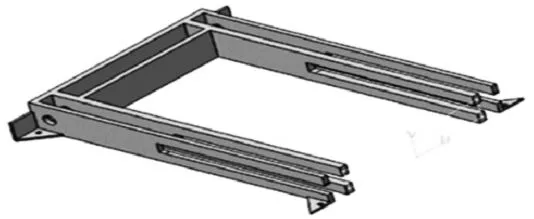
圖2 底座三維模型
3.4 滑塊設計
剪叉機構的舉升與降落是通過安裝在最底層臂架橫梁與底座橫梁之間的液壓泵來提供推力或拉力而實現的。在剪叉機構的運動過程中,底座橫梁與滑槽之間的摩擦形式是滑動摩擦,其接觸面為橫梁弧面與滑槽接觸的部分,由于弧面與滑槽接觸面積太小,易引起橫梁結構彎曲變形。為了減少彎曲變形,可從改善結構形式和載荷作用方式或選擇合理的截面形狀等方面入手。
綜合考慮,由于結構形式和載荷作用方式不易改變,首選改變其接觸面來減小底座橫梁與底座支撐臂之間的彎矩,在一定程度上改善彎矩值以達到減小彎曲變形的目的。滑塊不僅可以增大支撐橫梁與滑道之間的接觸面積從而減少壓強,起到承載作用,還可以利用滑塊對橫臂的滑動進行限位。
3.5 固定液壓缸的底座支撐臂及底層臂架橫臂設計
該設計主要是為了保證液壓缸的安裝及定位正確,尾部雙耳環安裝適合于活塞桿端工作過程中沿同一運動平面呈曲線運動路徑的工況,它可以在同一運動平面任意角度使用,這種安裝方式契合使用要求,設計中液壓按照尾部雙耳環安裝,與液壓缸相連的支撐臂設計如圖3 所示。
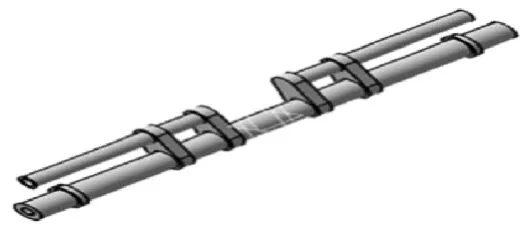
圖3 底座液壓支撐臂三維模型
3.6 升降裝置應用效果圖
將所設計的升降裝置安裝到三輪車微型逃生電動車上裝部分,其折疊狀態、升起作業狀態造型設計效果分別如圖4、圖5 所示。

圖4 升降裝置收縮狀態效果圖

圖5 升降裝置升起作業狀態效果圖
4 基于ANSYS 的有限元仿真分析
經上述的結構方案設計后,最終確定了微型逃生電動車用升降裝置的結構形式,并對升降裝置結構進行有限元仿真分析,本文利用有限元軟件ANSYS WORKBENCH 進行仿真分析。通過模型導入、添加材料、生成實體模型、建立坐標系、網格劃分、施加約束和載荷,對升降裝置的剛度、強度進行校核分析。
4.1 液壓支撐橫臂剛度、強度分析

圖6 液壓支撐臂等效應力云圖
液壓支撐橫臂在工作狀態下的受力云圖如圖6 所示,液壓支撐臂變形最大處約為0.97mm,最大von Mises 等效應力約為195.51MPa,取安全系數1.5,對比表1 中Q345 材料屬性,該液壓支撐橫臂滿足剛度、強度要求。
4.2 救援平臺剛度、強度分析

圖7 救援平臺等效應力云圖
救援平臺在工作狀態下的受力云圖如圖7 所示,救援平臺變形最大處約為5.19mm,最大von Mises 等效應力約為12.58MPa,取安全系數1.5,對比表1 中Mg-Al 合金材料屬性,該救援平臺滿足剛度、強度要求。
4.3 升降結構剛度、強度分析

圖8 升降結構等效應力云圖
升降結構在工作狀態下的受力云圖如圖8 所示,升降結構變形最大處約為17.0mm,最大von Mises 等效應力約為69.72MPa,取安全系數1.5,對比表1 中Mg-Al 合金材料屬性,該升降結構滿足剛度、強度要求。
4.4 底座剛度、強度分析
底座在工作狀態下的受力云圖如圖9 所示,底座變形最 大處約為0.0005mm,最大von Mises 等效應力約為1.09MPa,取安全系數1.5,對比表1 中Mg-Al 合金材料屬性,底座滿足剛度、強度要求。
5 結論
本文在結構設計的基礎上,利用有限元模擬技術、結構優化設計理論設計了微型逃生電動車用升降裝置。有限元仿真計算結果表明,該微型逃生電動車用升降裝置在剛度、強度及模態分析均滿足要求。該升降裝置質量輕,體積小,可折疊,操控靈活,可搭載在小型電動車上移動和升降,為高層建筑區內搶險救援工作帶來很大便利。另外,本文所采用的微型逃生電動車用升降裝置設計方法也可為其他逃生裝置、升降裝置結構設計提供參考和借鑒。
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50
