人車交互失衡與交通事故的相關性分析*
2019-10-28 07:03:36李松齡王佳琪馮樹民
武漢理工大學學報(交通科學與工程版) 2019年5期
李松齡 王佳琪 安 永 馮樹民
(哈爾濱工業大學交通科學與工程學院1) 哈爾濱 150090) (中國民航大學機場學院2) 天津 300300)
0 引 言
隨著汽車工業的快速發展及國內汽車的普及,人們的道路交通安全意識越來越高.交通法規的不斷完善以及各種防治措施的提出,使得交通事故的數量有明顯下降.雖然最近幾年我國道路交通事故數量降幅明顯,但依然高發.目前,我國交通事故年死亡人數仍高居世界第二位,遏制交通事故發生任重道遠[1].
為降低交通事故的數量,改善道路交通環境,針對駕駛員的駕駛行為,國內外已經開展了大量的研究.Liourta等[2]研究了道路線形與駕駛行為之間的關系,提出了彎道路段的駕駛行為辨識模型;Lamm等[3]研究了道路設計、駕駛員行為、駕駛動力特性和交通安全的內在關系,提出了交通安全標準和道路設計目標;Smith等[4]事故的影響;Abdel等[5]通過研究得出駕駛人的駕駛差錯是導致道路交通事故的重要因素之一;Lucas[6]研究了駕駛人駕駛差錯導致交通事故的產生原因,分析了導致駕駛差錯交通事故的具體因素,并針對該類交通事故提出了預防對策;黃榮貴[7]研究汽車駕駛員的差錯特性,提出預防駕駛行為差錯,應從車輛設計、道路交通的改善上提供最優條件,并遵循人機工程的原則,提高人的可靠性;李顯生等[8]建立了駕駛行為運動系統,并依據人的行為差錯理論分析了駕駛行為過程中駕駛員的各種生理狀態,以及生理狀態導致的各種駕駛行為差錯;王全[9]對串聯式駕駛行為可靠性評估模型加以完善,使其更準確的描述駕駛行為實質,反映駕駛員個體的事故傾向性;王武宏[10]提出了駕駛員操作可靠性的評定方法,并得出駕駛員安全駕駛的量度值;胡立偉等[11]提出駕駛差錯的糾正度和差錯度的概念,提出了駕駛失誤率的簡化算法.
目前,國內外對交通事故的研究大多單獨從駕駛員、車輛、道路三方面入手,對人車交互失衡的研究很少,文中通過對交通事故原因的深入分析,提出人車交互失衡的概念,探究其與交通事故的關聯性.
1 人車交互失衡
1.1 駕駛行為差錯
駕駛員行為差錯是指駕駛員未能實現規定的操作(或實施了禁止的操作),可能導致中斷任務執行或引起人員傷亡和車物損失[12].駕駛行為差錯是客觀存在的,只要車輛在道路上行駛,就必然伴隨駕駛行為差錯的發生[13].駕駛行為差錯體現在很多方面,例如感知差錯、判斷差錯、操作差錯、技術差錯、著裝差錯等,每一種差錯都有可能導致車輛的不正常行駛,從而引發交通事故.
1.2 人車交互失衡
車輛是使人或貨物發生位移的交通運輸工具,車輛的行駛過程,是人車共同參與完成的,其本質是信息傳遞、信息處理、機械操作以及信息反饋的過程.人車交互過程見圖1.如果車輛處于在行駛過程中出現故障,勢必會造成人車交互失衡.如果車輛的各個系統完好不存在機械故障,機械設備本身的誤差在安全范圍內可忽略不計,那么車輛行駛過程中的差錯就是由駕駛員的行為差錯引起的.但是,駕駛行為差錯有一定的誤差范圍,當超過誤差允許的范圍時,駕駛行為差錯就會導致人車交互失衡.

圖1 人車交互過程
2 人車交互失衡與交通事故原因的關聯性
經調查統計,造成交通事故的原因有超速行駛、酒后駕駛、不按規定讓行、違法超車以及無證駕駛等約35種.其中超速行駛、酒后駕車、逆行、疲勞駕駛、違法超車以及違法上道路行駛等22種屬于交通違法行為;未設置道路安全設施、安全設施損壞滅失、道路缺陷、其他道路原因以及自然災害5項屬于道路環境問題;機件故障、爆胎、制動不當、轉向不當、油門控制不當以及其他控制不當等6項屬于人和車相互作用中產生的問題.
駕駛員對車輛的操縱就是駕駛員在行車過程中對油門踏板、制動踏板、轉向盤轉向的角度以及車輛其他模塊的控制,這是一個人車交互的過程.駕駛員對車輛的操控不當,例如,轉向盤轉動角度不足或者過大導致車輛不能按正常的軌跡行駛;駕駛員踩制動踏板過輕導致制動不足從而使車輛未能在危險前及時停車;駕駛員誤把油門當剎車導致車輛失控等.這些行為都屬于駕駛員操作不當.這些錯誤的操縱均導致了人車交互過程的紊亂,即人車交互失衡.同樣駕駛時有妨礙安全行車的行為也會導致人車交互失衡,引發交通事故.
跟車行駛時,兩車之間的車距是一個動態調整的過程.也是駕駛員與前車交互的同時與自己駕駛的車輛交互的過程.車距感知不當是由于駕駛員在人車交互過程中對前方車輛的距離、以及兩方車輛的行駛速度感知判斷錯誤導致的,即駕駛員的感知判斷失誤導致人車交互失衡.
綜上所述,35種交通事故原因中,操縱不當、駕駛時有妨礙安全行車的行為、跟車過近、這些原因與人車交互失衡具有相關性.
3 人車交互失衡的重要性
3.1 哈爾濱市交通事故原因調查
從哈爾濱市交管局事故處獲得的交通事故統計報表,采用分層法對數據進行統計分析,得出哈爾濱市近6年的交通事故發生情況.見表1.
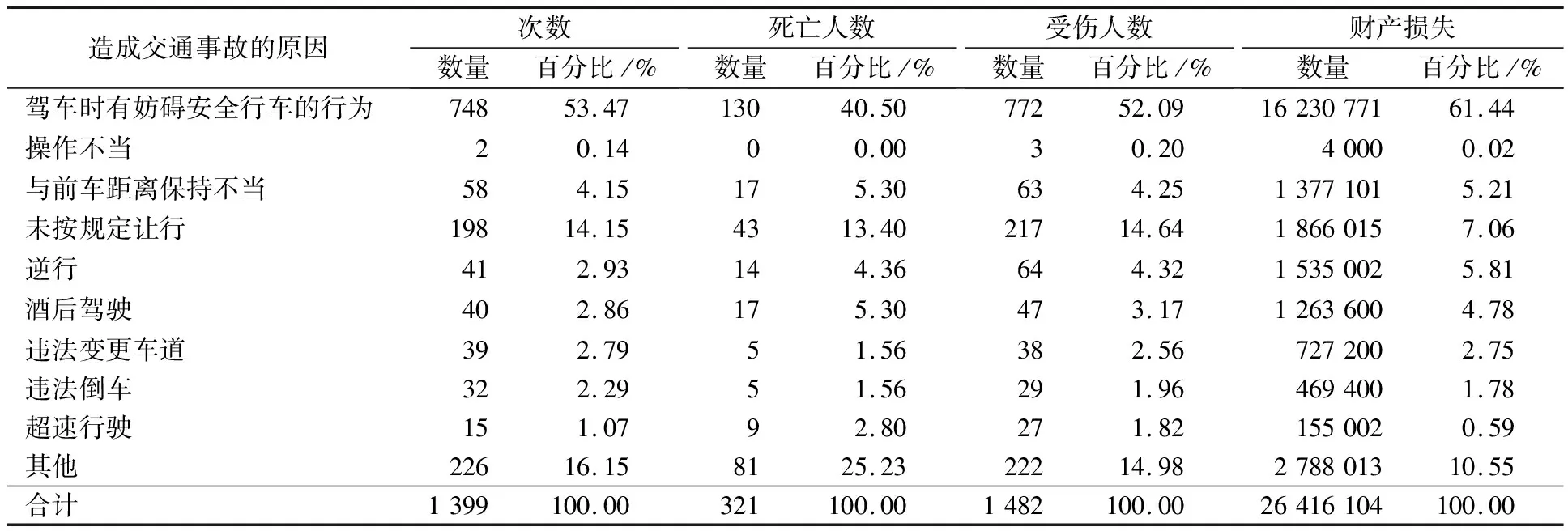
表1 2016年哈爾濱交通事故四項指數統計
由表1可知,駕車時有妨礙安全行車的行為、操作不當、與前車保持距離不當符合人車交互失衡的概念,這三種原因造成的交通事故數占交通事故總數的57.76%,即由人車交互失衡導致的交通事故數占事故總數的57.76%.由人車交互失衡導致的交通事故死亡人數為147人,是所有事故原因中造成死亡人數最多的,占總死亡人數的45.8%.由人車交互失衡導致的交通事故受傷人數為838人,占總受傷人數的56.54%.由人車交互失衡導致的交通事故財產損失為17 611 870元,占總財產損失的66.67%.
調查統計2011—2016年哈爾濱市近6年的交通事故四項指數,見圖2.

圖2 2011—2016年哈爾濱交通事故四項指數對比
由圖2可知,近6年哈爾濱市由人車交互失衡引發的交通事故在四項指數中的占比均大于30%,且大多接近或超過半數,造成的經濟損失尤為嚴重,均超過50%.
3.2 南寧市交通事故原因調查
根據對廣西省南寧市交通事故原因調查統計,2017年南寧市城市道路共發生重點責任交通事故21 824起,造成153人死亡、2 387人受傷.通過對這些事故原因分析,駕駛時有妨礙安全行車的行為、與前車距離保持不當、不按規定倒車、占道通行和不按規定讓行是交通事故發生的主要原因,表2為2017年廣西南寧市城市道路交通事故統計表.
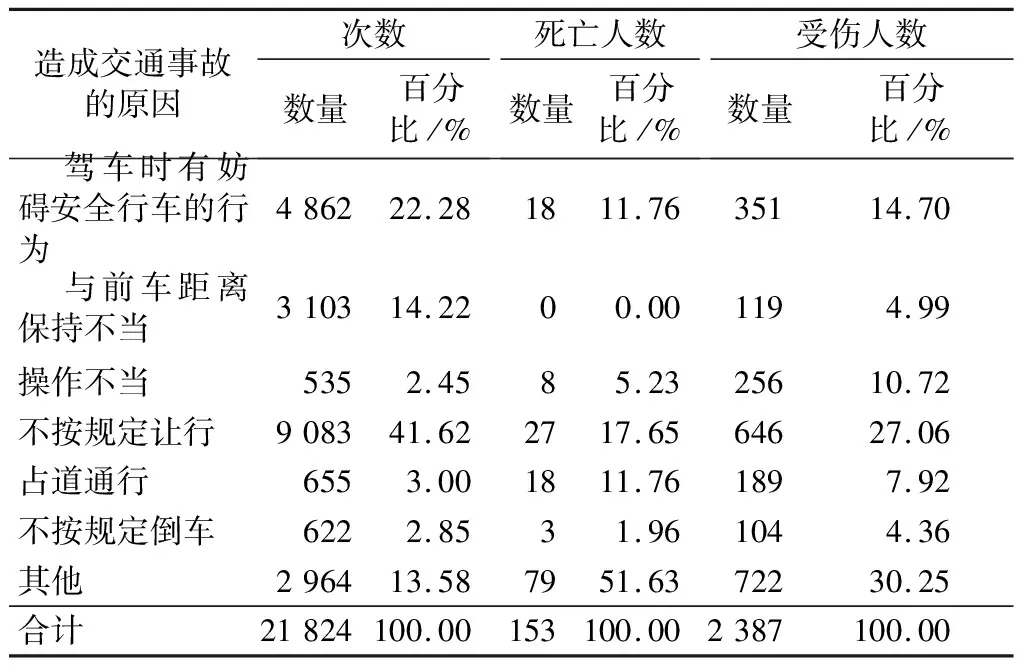
表2 2017年南寧市交通事故統計
根據表2可知,駕車時有妨礙安全行車的行為、與前車距離保持不當、操作不當,未按規定讓行,占道通行以及不按規定倒車五項因素是造成2017年南寧市21 824起交通事故的主要原因.其中駕車時有其他妨礙安全行車的行為、與前車距離保持不當、操作不當屬于人車交互失衡,共造成26人死亡,726人受傷,占當年事故總死亡人數和總受傷人數的比例分別為16.99%,30.41%.由人車交互失衡引發的交通事故次數為8 500次,占總交通事故數的38.95%.
3.3 吉林省高速公路交通事故原因調查
以吉林省高速公路為例,調查統計吉林省近三年10月份高速公路交通事故發生情況,統計造成交通事故的主要因素見表3.
2014—2016年的每年10月份,吉林省高速公路共發生51起交通事故,造成40人死亡,其中由人車交互失衡導致的交通事故36起,占比高達總事故數的70.58%,造成24人死亡,占事故總死亡人數的60%.由此可以看出,由人車交互失衡引起的事故在總事故次數和死亡人數兩項指標中均占比最高.

表3 吉林2014-2016年10月高速公路交通事故成因統計
4 結 論
1) 根據哈爾濱、南寧兩市以及吉林省高速公路的相關數據顯示,由人車交互失衡導致的交通事故數占總交通事故數的比例分別為57.76%,38.95%,70.58%,其中吉林省和哈爾濱市占比都超過50%.
2) 在歷年的交通事故中,由人車交互失衡導致的事故次數占總次數的比例在40%~60%,曲線有平穩增長趨勢.由人車交互失衡導致的交通事故死亡人數占總死亡人數的比例分別為36.04%,33.43%,42.27%,45.08%,48.39%,45.80%,有緩慢增長的趨勢.由人車交互失衡造成的事故受傷人數占總受傷人數的比例為30.72%,36.85%,49.52%,42.52%,56.05%,56.55%,增長比較迅速.由人車交互造成的財產損失所占比例最大,均超出了50%,2013年更是達到了73.15%.由此說明人車交互失衡與交通事故發生有很大的相關性.同時,隨著年份增長,交通智能化的發展,由人車交互失衡造成的交通事故在四項指數中占比總體均有所增長.
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中小學校長(2021年9期)2021-10-14 14:36:14
瘋狂英語(雙語世界)(2021年2期)2021-07-03 11:10:26
寶藏(2019年3期)2019-03-28 05:24:16
寶藏(2019年3期)2019-03-28 05:24:16
汽車電器(2018年1期)2018-06-05 01:22:54
公民與法治(2016年4期)2016-05-17 04:09:26
城市道橋與防洪(2013年8期)2013-03-11 15:18:12
