電子星模在衛星控制系統閉環測試中的應用
2019-10-29 08:55:38
計算機測量與控制 2019年10期
關鍵詞:系統
(北京軒宇空間科技有限公司,北京 100190)
0 引言
電子星模是一種常用的信號源,其作用是向星敏提供星圖,主要用于對星敏的各種測試中[1],但這里的星圖并不是一成不變的,時常要根據實際的需要進行動態變化。例如為了更加充分的對控制系統星敏在軌工作情況進行全面的測試驗證,需要采用電子星模作為星敏的動態激勵源[2],進行衛星控制分系統閉環測試[3],該方法可更真實的在地面測試階段對控制分系統星敏的工作情況進行驗證[4],但此方法在實際應用時對產品的物理安裝要求苛刻,很難保證系統的實際安裝滿足閉環測試條件,而星敏又是對姿態精確測量的敏感器,因此需要需要精確校準,為精確實現對星敏的動態激勵與采集,需要設計旋轉支架對動態星模進行精確調整,進而控制星模輸出理想星圖,由此看出,電子星模安裝擺放的位置直接影響到星敏測量輸出的控制系統能否正常工作,提高星模輸出星圖的準確性直接關系到控制系統中星敏的測量精度,影響控制分系統性能指標的實現[5]。傳統的方式是通過調整支架,對星模輸出進行標定。該方法實現起來費時費力且精度不高。
本文通過靜態的方式建立星模安裝補償矩陣,并通過動態補償的方式完成閉環測試,比起調整支架的方式閉環測試的精度更高。首先需要靜態的將電子星模的光軸和星敏的光軸調整一致,并且保證在整個測試中物理位置擺放保持不變,地面動力學靜態的輸出固定的四元數,通過電子星模輸出星圖,星敏進行采集,并將采集到的四元數反饋給控制計算機,通過控制計算機遙測輸出的星敏四元數與地面動力學設置輸出的四元數進行比對,計算出星敏的安裝偏差矩陣,將該矩陣引入到系統閉環測試中。
試驗過程中提取了相應的試驗數據并進行了分析計算。該測試方法在工程應用中具有優勢。
1 測試系統設計
由于星敏是一種精確姿態測量敏感器,對動態星模的星圖輸出必然要求很高,本文涉及到某型號衛星控制分系統采用三星敏進行姿態確定,且該型號中星敏是衛星姿態確定的唯一姿態敏感器,星敏測量姿態的準確與否直接影響到衛星在軌工作情況,因此采用電子星模對星敏在閉環系統的工作情況進行地面驗證是十分必要的。本系統引入電子星模進行控制分系統星敏引入到閉環系統中驗證[6]。
1.1 系統組成
該測試系統由星上產品三只星敏、中心控制單元計算機簡稱AOCC、地面動力學測試系統以及兩臺套電子星模組成。其中電子星模包括線路、探頭和上位機。電子星模線路將星圖信息和四元數信息進行匹配處理,電子星模的探頭輸出光軸對準星敏光軸,光軸的同軸性可通過調整電子星模探頭支架保證,電子星模探頭的供電由電子星模線路提供,上位機用來接收地面動力學通過網絡按照約定的協議發送的四元數信息。AOCC計算機和星敏之間由電纜連接,AOCC計算機實時獲取當前星敏采集到的姿態信息。AOCC和地面系統之間通過CAN總線交換信息,以保證地面系統實時可獲取星上計算機的各種遙測狀態。地面系統之間以及地面系統和動態星模上位機之間通過網絡進行信息交換。地面及星上系統連接如圖1所示。
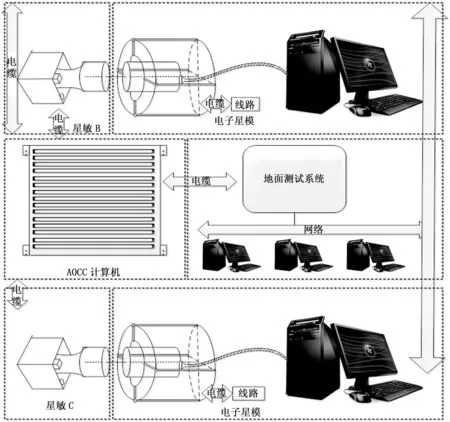
圖1 系統連接示意圖
1.2 系統工作原理
地面測試系統運行實時操作系統, 每個仿真周期都會模擬輸出慣性四元數信息, 電子星模根據輸入的慣性姿態數據,實時生成與該姿態對應的星圖,并將該星圖轉換為數字視頻信號向星模探頭輸出,使星敏獲得所需要的電子圖像。地面動力學仿真周期10 ms,每10 ms就會更新姿態輸出數據,星敏的采樣周期200 ms,地面系統輸出的姿態頻率遠遠高于星敏采樣頻率,同時電子星模可為星敏提供不同工況下靜態、動態圖像供星敏識別,一方面可驗證星敏在控制系統中工作情況,另一方面通過電子星模可模擬光學系統殘差、暗電流、噪聲、溫度、雜光拖尾等因素的影響可驗證星敏在軌工作性能[7-8]。
2 電子星模在系統中的標定方法
星敏在控制系統應用中要對安裝矩陣進行裝訂,地面動力學模擬星敏輸出四元數也是按照預先設計的裝訂值進行設計輸出。實際系統閉環測試時存在一個問題,動力學理論計算輸出的四元數,通過網絡傳輸給電子星模轉換成電子圖像,再由星敏采集計算出的四元數并不一致。主要原因是實際測試過程中星敏的擺放位置很難保證星敏的橫軸與電子星模的探頭橫軸完全重合,導致星敏實際采集的電子圖像與理論電子圖像存在角度上的偏差,因此星敏采集到的四元數存在偏差,在系統閉環測試過程中嚴重影響系統測量精度的實現。
如果要應用電子星模進行控制系統的閉環測試,就必須對系統內的偏差進行有效補償。傳統的方式可通過調整探頭的方式,進行光軸對準,但此方法無法精確的保證光軸對準精度,為了解決此問題定義了所需要的變量,如表1所示。
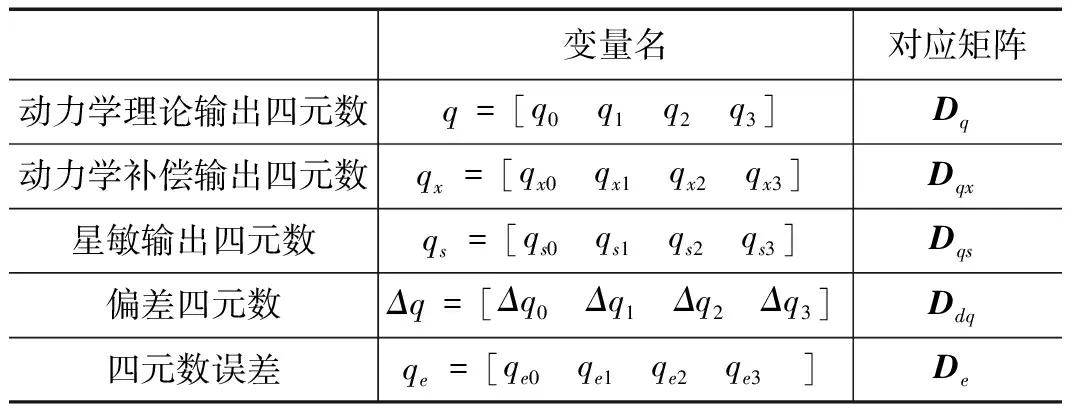
表1 變量表
鑒于計算補償的方式具有接近理想模型[9]且易于實現的優勢,本文通過靜態計算的方式實現,其中動力學理論輸出四元數[10-11]為q,動力學補償輸出四元數qx,下面對模型的輸入輸出、確定模型參數、模型計算、數據的傳遞等具體設計進行詳細介紹。
模型的輸入輸出。由于該模型的作用是為了計算星敏安裝偏差,進而進行控制輸出補償,因而將模型設計為單輸入單輸出模型,其輸入變量為動力學計算輸出星敏理論四元數,輸出變量為經過星敏采集圖像計算輸出的測量四元數,兩者之間的差為星敏輸出偏差估計值,估計值達到一定精度后,可利用該偏差估計值對控制輸出進行按比例修正,即可得到理論的輸出結果。
確定模型參數。設置地面動力學輸出50組固定的慣性姿態數據q,通過該系統,星敏可以采集到50組固定的姿態數據qs,每一次采集都會有對應的Δq產生,Δq是電子星模輸出q和星敏輸出qs之間的誤差。而在實際計算時,由于每組四元數都對應著相應的轉移矩陣,應用公式(1)可計算出50組四元數對應的Ddq,根據Ddq可計算輸出Δq。
Ddq=Dqs/Dq
(1)
當系統的物理擺放位置不變時,Δq的值保持不變,而在實際的試驗過程當中存在采集誤差、數據計算誤差等被引入到系統中,這是不可避免的,因此在進行模型修正設計時,控制誤差影響因子,是保證修正準確的前提條件。實際系統中計算出的50次樣本誤差值并不完全一致是由于系統存在計算誤差造成的。為了提高模型的實現精度,我們將模型輸出的Δq進行均方差計算,通過數學篩選的方式提取其中80%的數據,并計算出平均值作為系統的偏差矩陣。
在閉環測試中每個仿真周期內,都用偏差矩陣Ddq乘上動力學輸出的理論值Dq得到Dqx,即公式(2):
Dqx=Ddq·Dq
(2)
轉移矩陣Dqx推算出qx。經過以上計算輸出了補償后的動態四元數qx。利用該修正后的四元數可輸出星圖,供星敏采集。
數據的傳遞。qx值通過地面測試網絡實時發送給電子星模控制計算機,電子星模線路將測試計算機接收的星敏四元數實時轉換出帶有偏差修正的電子星圖并輸出,星敏可通過電子星圖識別出當前動力學輸出四元數, 再通過星敏與AOCC的接口,將當前四元數傳遞給AOCC, AOCC再通過遙測下傳的方式, 將當前系統的姿態輸出到遙測界面上,我們通過對比轉換出的姿態和地面動力學輸出的姿態可確定該誤差補償的情況是否滿足系統控制精度要求。
通過以上模型計算的方法可標定出地面動力學輸出給電子星模的慣性姿態四元數,經過標定后的四元數輸出,可保證星敏采集到地面動力學理論姿態四元數,可保證衛星控制分系統地面閉環測試的精度。在星敏和電子星模探頭擺放位置不變的情況下,該補償量不變,系統每次加斷電不需要重新進行系統標定。
3 測試軟件設計
地面測試軟件需要按照控制周期產生的四元數進行閉環測試,因此要求產生的四元數滿足實時性要求。以下將通過軟件運行的環境,設計實現機理,數據流傳輸方向以及上位機軟件的設計實現幾個方面進行詳細介紹。
考慮到星敏在控制系統中快速姿態確定的特點,因此在設計地面動力學產生四元數到AOCC真正采集到四元數的過程要在AOCC的一個控制周期內完成。VxWorks實時操作系統具有實時性好,系統本身開銷小的特點,其進程調度、進程間通訊、中斷處理等公用程序精煉而被廣泛應用于各種實時性場景。VxWorks提供多任務機制中對任務的控制采用優先搶占和輪轉調度機制,充分保證了可靠的實時性。基于VxWorks的以上優點,地面測試系統運行VxWorks實時操作系統,地面動力學運算每10 ms根據當前閉環激勵,產生一次敏感器輸出。可通過上位機界面將標定后的誤差四元數寫入到動力學里,動力學在每次輸出四元數時自動引入誤差四元數計算輸出。底層軟件通過網絡轉發的方式按照和電子星模事先約定好的協議進行數據打包發送。
網絡輸出四元數設計。VxWorks內核通過設備驅動程序調用硬件網口輸出,動力學計算輸出通過地址映射的方式寫入網口輸出緩存區。上位機軟件和VxWorks操作系統之間通過MultiProg軟件進行傳遞信息。其中MultiProg主要負責任務的調度、流程的實現以及相關數據的顯示。VxWorks主要負責驅動、模塊的封裝、算法的封裝、與主控機間的通信、與數據庫間的通訊。
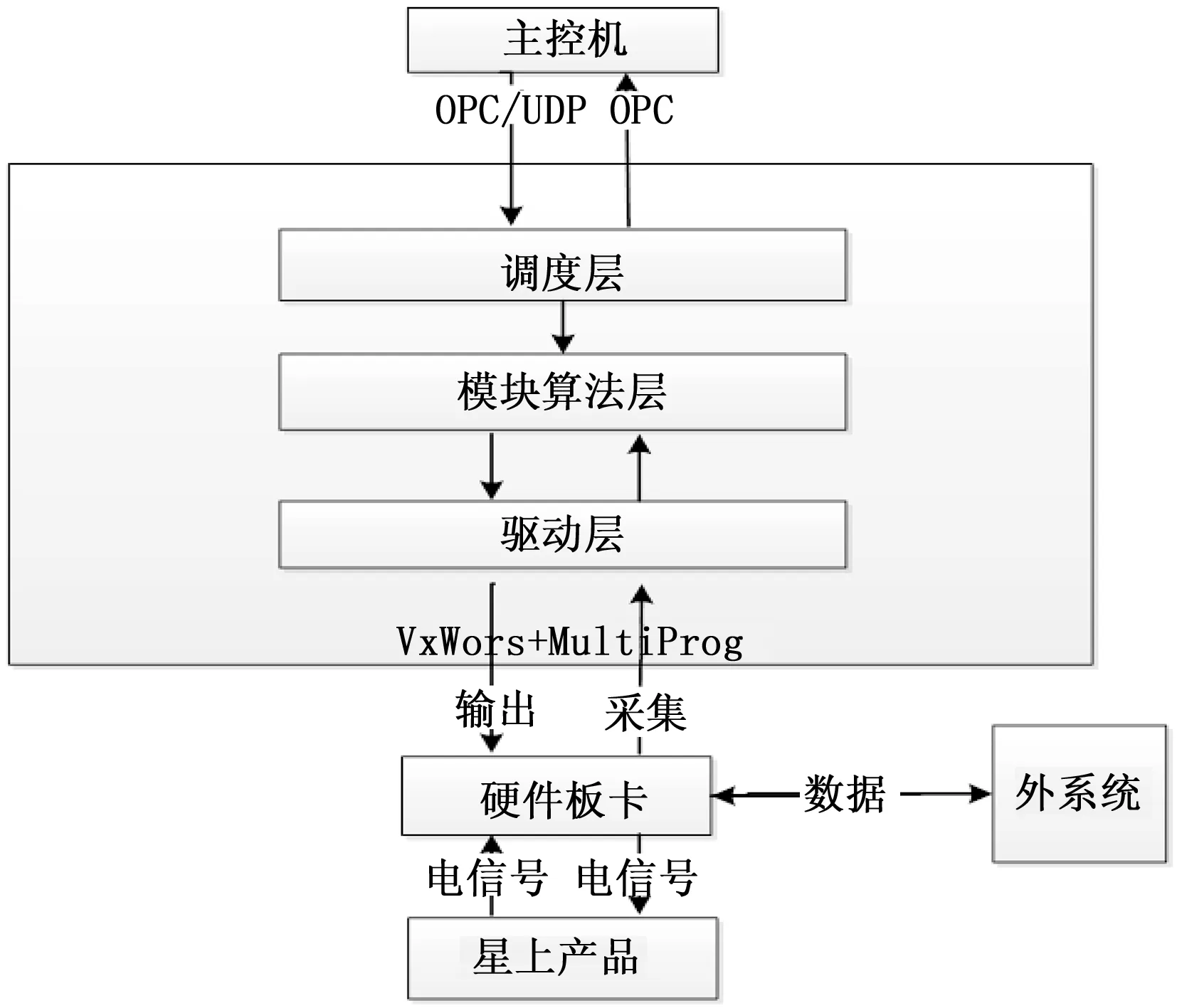
圖2 數據流圖
模塊算法層在VxWorks內運行動力學軟件根據閉環系統力矩計算星敏姿態四元數的計算,通過Firmware軟件進行模塊封裝。調度層主要為與上位機軟件通訊,通過上位機寫入的誤差引入指令和誤差四元數進行相關模塊算法的調度。可將系統分為三層,分別為:驅動層、模塊算法層、調度層。其中驅動層通過在MultiProg 內對數據寫內存進行寫數據,將寫內存映射到VxWorks內,然后再在IO驅動寫中將數據寫入到相應硬件輸出口。
上位機軟件界面采用VC++設計,示意圖如圖3所示,界面上設置有開始標定按鈕、計算誤差四元數按鈕、引入誤差按鈕、目標四元數、采樣四元數、誤差四元數。手動寫入目標四元數,通過開始標定按鈕,使系統通過總線讀回星上遙測輸出的采樣四元數,通過目標四元數和采樣四元數計算輸出誤差四元數,點擊引入誤差按鈕,將誤差四元數寫入系統動力學中。地面動力學設置有誤差引入標志,可通過上位機的引入誤差按鈕設置,當該開關打開時,誤差四元數引入系統計算中,動力學默認輸出的四元數是和誤差四元數組合計算后輸出的四元數。最終我們通過驗證此時地面動力學輸出的姿態信息和星上解算出的姿態信息來驗證。
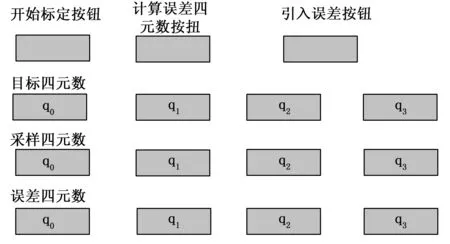
圖3 軟件界面示意圖
4 動態星模系統試驗
在某衛星控制分系統地面測試設備中,利用了上述模型對閉環控制系統進行靜態標定,在測試過程中截取同一段時間內的地面動力學輸出給星敏的理論數據和星敏采集到的姿態信息數據。
動力學設置輸出q:

將Ddq代入公式Dqx=Ddq·Dq,得到動態輸出的Dqx,經50次標定后,對Dqx進行均值化處理,將qe帶入到帶有電子星模的閉環測試中,如下列圖所示, 計算理論輸出和采集的四元數之間的誤差。
經過標定后采集值和理論值的誤差曲線如圖4~7所示,qe0代表動力學輸出的四元數q0和系統遙測輸出的四元數之差,最大誤差為0.0007。qe1代表動力學輸出的四元數q1和系統遙測輸出的四元數之差,最大誤差為0.0006。qe2代表動力學輸出的四元數q2和系統遙測輸出的四元數之差,最大誤差為0.0004。qe3代表動力學輸出的四元數q3和系統遙測輸出的四元數之差,最大誤差為0.0004。通過誤差曲線可以看出, 經過標定后的星敏誤差四元數的值最大為0.0007,小于0.07%,誤差值接近于零。對于閉環測試系統姿態確定影響可忽略不計。通過以上修正方法將系統閉環測試中的誤差計算出來并有效的消除,證明了該測試方法的實用性和有效性。
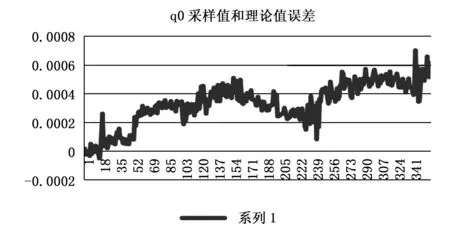
圖4 qe0
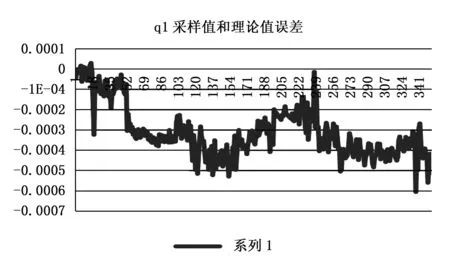
圖5 qe1
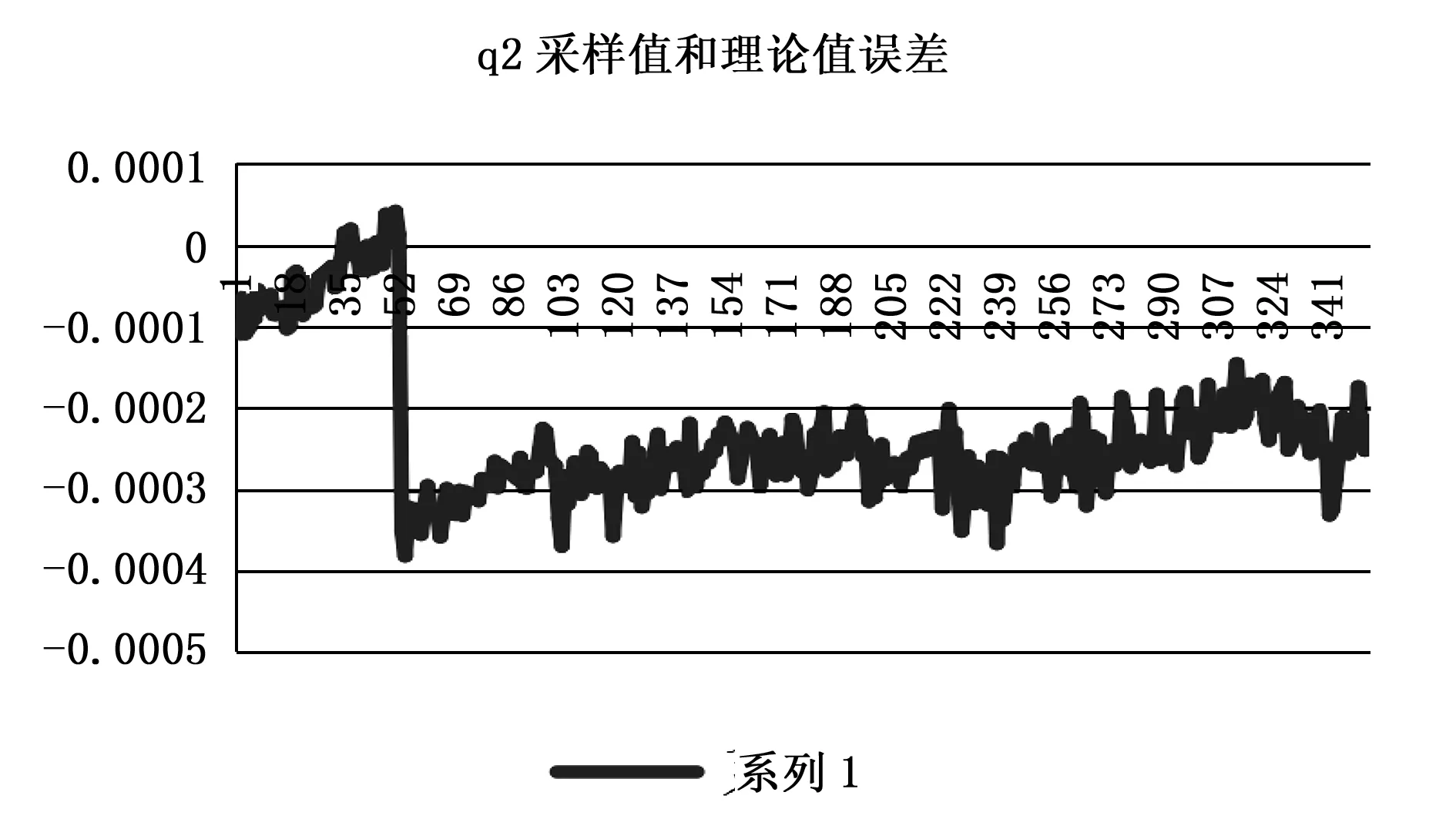
圖6 qe2
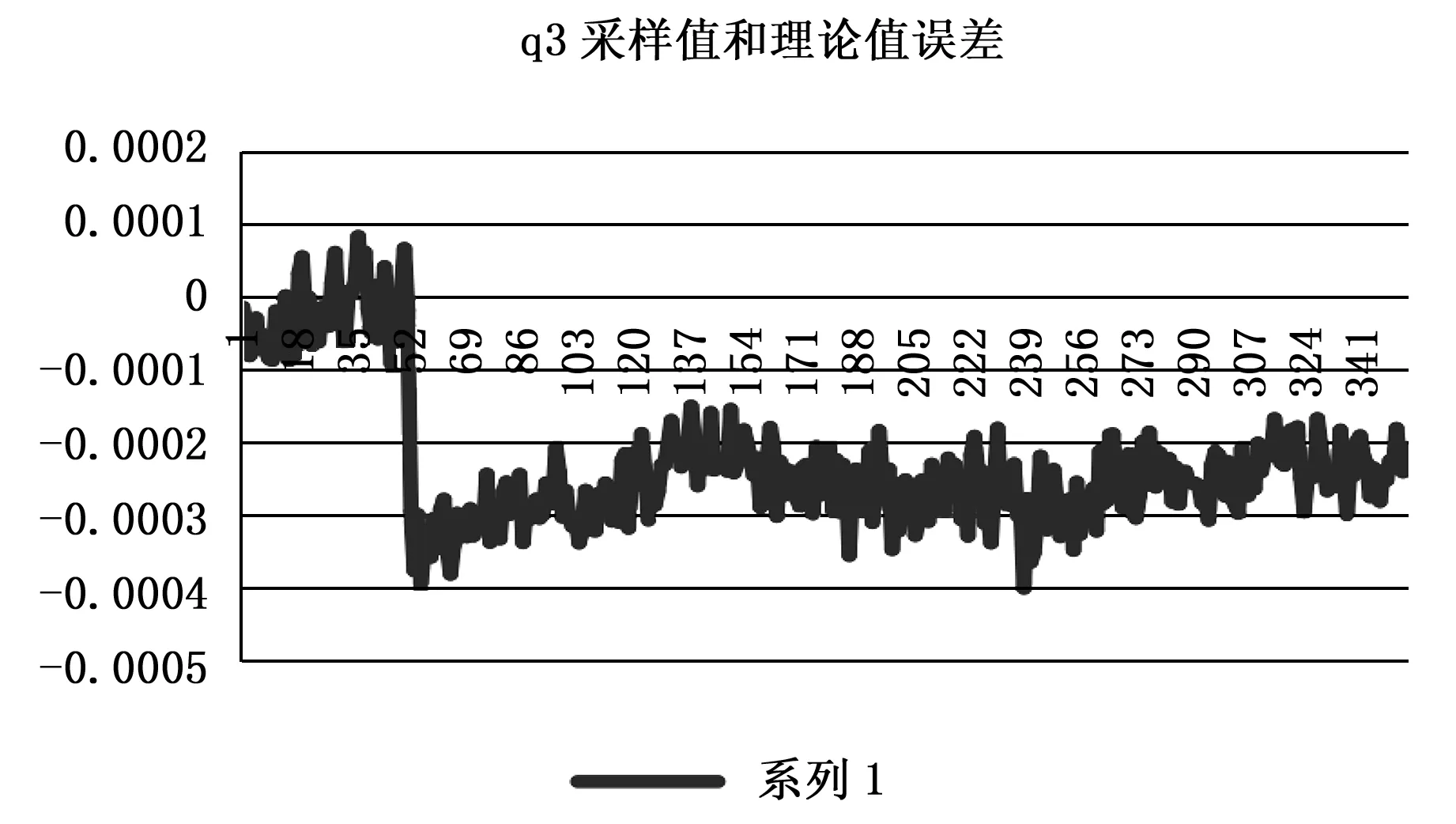
圖7 qe3
5 結論
本文設計了電子星模標定數學模型,并以該模型為基礎設計修正測量方法,利用模型估計出星模安裝偏差,并按比例對安裝偏差進行補償。將電子星模應用于衛星控制分系統的閉環測試中,真實的在地面模擬了星敏在軌識別星圖確定姿態的工作情況。 消除了應用電子星模地面測試存在的誤差,更充分驗證某衛星控制系統方案的可行性提供了解決方法。該方法具有通用性,可廣泛應用于控制系統閉環測試中。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32