模塊化輪腿式月面機器人方案設計
2019-10-31 01:35:22韓亮亮張元勛
載人航天 2019年5期
關鍵詞:模塊化
岳 念,李 聰,韓亮亮,張元勛
(1.重慶大學教育部深空探測聯合研究中心,重慶400044;2.重慶大學機械工程學院,重慶400044;3.上海宇航系統工程研究所,上海201109;4.重慶大學航空航天學院,重慶400044;5.中國航天科技集團有限公司空間結構與機構技術實驗室,上海201108)
1 引言
輪腿式機器人綜合了輪式機器人的高機動性以及足式機器人的高靈活性的特點,得到了國內外大量的研究與設計[1]。但面對非結構化的月面環境,輪腿式機器人因其固定的結構及尺寸,機動范圍以及任務能力均受限[2]。因此需要研究可重構機器人。
目前,針對機器人可重構性問題的研究,主要集中在模塊設計、構型設計、運動模型、重構方法、控制系統幾個方面[3],并且研究對象大多為模塊化機械臂,對于模塊化的移動機器人研究較少[4-5]。
本文將模塊化設計引入月面移動機器人,對典型的月面移動機器人——輪腿式機器人進行模塊化設計,以使該機器人在具備傳統輪腿式機器人性能的基礎上,具有較高的可重構性。
2 總體方案
參考生物界昆蟲的多種構型以及對應的運動方式,考慮模塊化機器人的3種類型——直線型、環形、晶格型[6],對輪腿式機器人車身模塊以及輪腿模塊進行設計,得到總體方案如圖1所示,該方案可組成的多種不同構型如圖2所示。
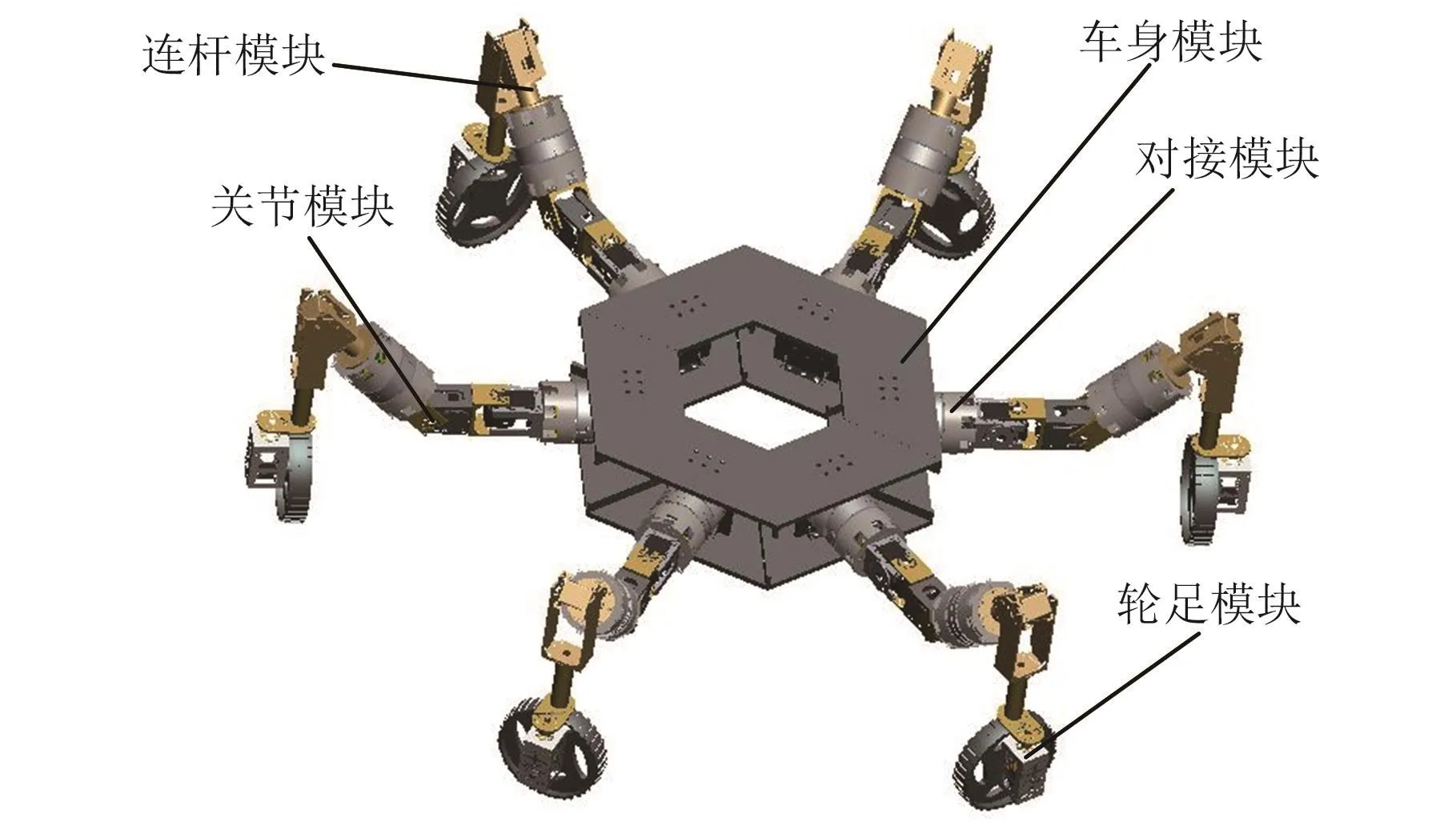
圖1 模塊化輪腿式月面機器人方案Fig.1 Scheme of modular wheel-legged lunar robot
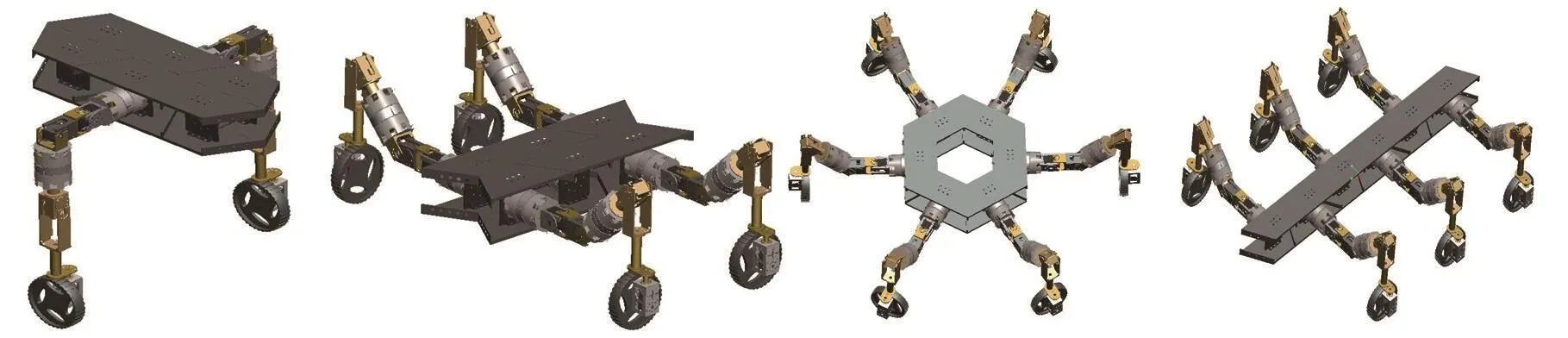
圖2 模塊化輪腿式月面機器人不同構型Fig.2 Schematic diagram of modular wheel-legged lunar robot configuration
該機器人由車身模塊、關節模塊、輪足模塊和其他模塊組成。其中,車身模塊為中心模塊;關節模塊為機器人移動系統的核心模塊,機器人的運動以及自由度的調整由關節模塊決定,通過增加或減少關節模塊,可改變模塊化輪腿式機器人的構型及自由度;輪足模塊作為機器人末端行走機構,可通過改變模塊或鎖緊車輪更換機器人行走方式;其他模塊為上述模塊提供能源保障、通信及及其他功能。車身模塊與關節模塊之間、不同的關節模塊之間均采用無極性對接進行連接。
3 構型設計
3.1 模塊化
模塊化設計的目的在于實現輪腿式月面機器人的可重構性[7],工程需要從中選擇滿足要求的模塊組合。
基于圖論可得到不同構型輪腿式月面機器人對應的構型圖以及構型矩陣,通過構型圖可知所搭建的機器人基本構型,通過構型矩陣,可知所需要的模塊種類、數量、連接關系[8]。同理,已知構型圖及構型矩陣,就可以得到模塊的種類、數量以及連接關系,從而解決工程中快速搭建不同機器人構型的問題。
對模塊化輪腿式月面機器人進行構型設計,首先建立模塊化可重構六支鏈輪腿式月面機器人構型樹,在構型樹中,總體構型作為樹的出發點。車身模塊組成車身構型,關節模塊、輪足模塊、其他模塊組成輪腿構型,這兩大構型作為總體構型的兩大分支。對車身構型及輪腿構型進行細化,分別建立車身構型圖及關聯矩陣,將車身構型得鄰接矩陣設為Mv(G),輪腿構型的鄰接矩陣為Mh(G)。根據鄰接矩陣的定義,得出模塊化六支鏈輪腿式月面機器人總體構型的鄰接矩陣M(G)為式(1):

其中Mvh(G)為組成車身的元素(車身模塊)與組成輪腿的元素(關節模塊及連桿、輪足模塊)之間的鄰接矩陣。以正六邊形六支鏈輪腿式月面機器人作為對象進行構型分析,正六邊形六支鏈輪腿式月面機器人總體構型之一如圖3所示。
圖3(b)中的H1-H6表示機器人單腿圖,對應圖3(d),H1-H6為同構。根據模塊的設計及構型示意圖,列出機器人的節點對照表,如表1所示。
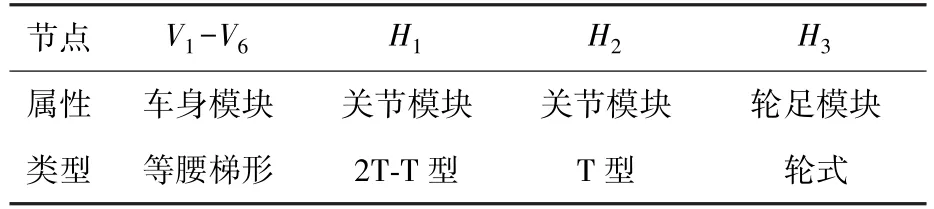
表1 節點對照表Table 1 Table of node contrast
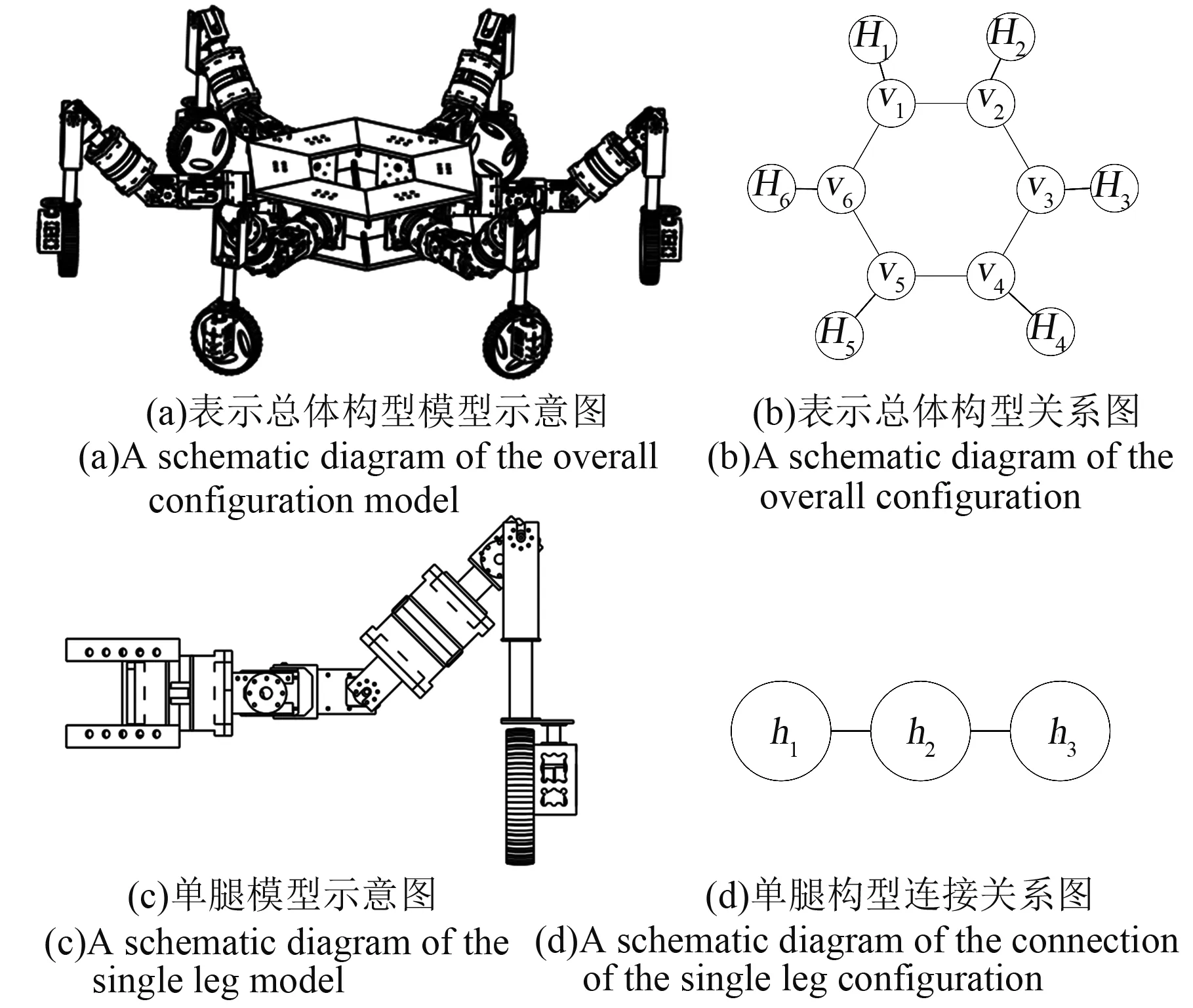
圖3 正六邊形六輪腿月面機器人圖Fig.3 Diagram of regular hexagonal six branched wheel-legged lunar robot
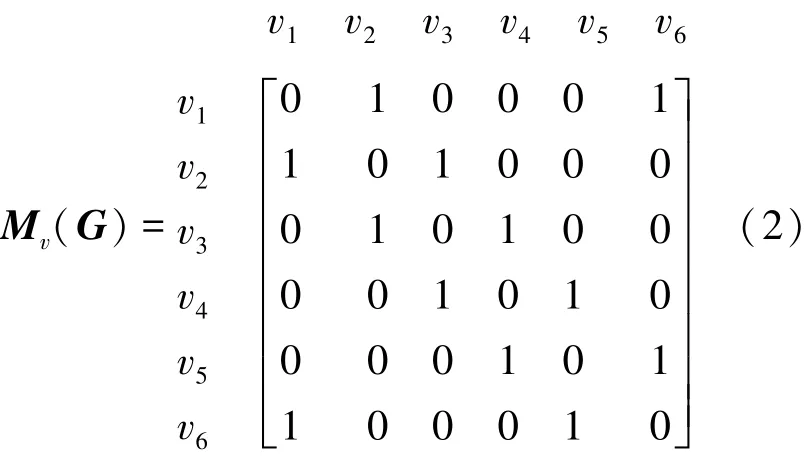
采用圖論中圖的鄰接矩陣的算法求得車身構型的鄰接矩陣Mv(G)為式(2):
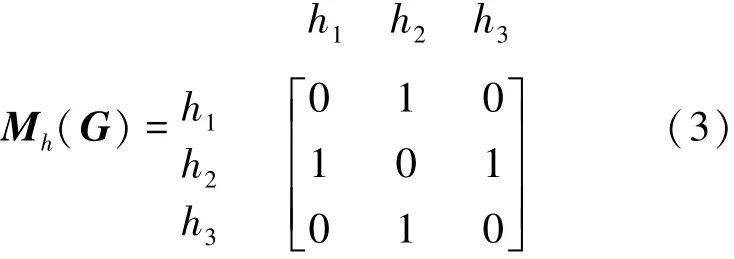
輪腿圖的鄰接矩陣Mh(G)為式(3):
車身模塊與輪腿模塊之間的鄰接矩陣Mvh(G)為式(4):

從而算得圖3所示構型的模塊化輪腿式月面機器人的構型矩陣M(G)為式(5):
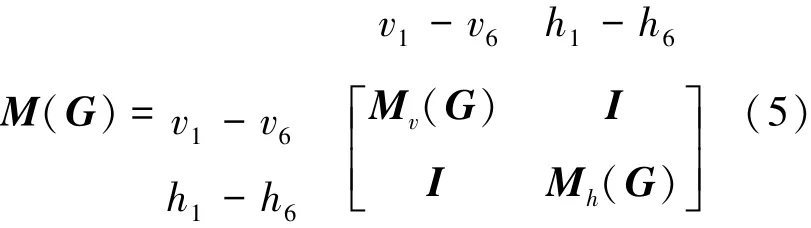
通過上述方法,可算出不同構型的機器人的構型矩陣,結合構型簡圖以及節點對照表,即可快速得到模塊的種類、數量、連接方式。
3.2 運動學分析
以典型的正六邊形構型的模塊化輪腿式月面機器人(環形)以及直線形構型的模塊化輪腿式月面機器人為例,針對最基礎的足式直線運動,以車身運動中的平穩度為評價標準,從步態種類、步態特性、運動特性3個方面進行對比分析,可得環形與直線型模塊化輪腿式月面機器人直線運動分別如圖4、5所示。
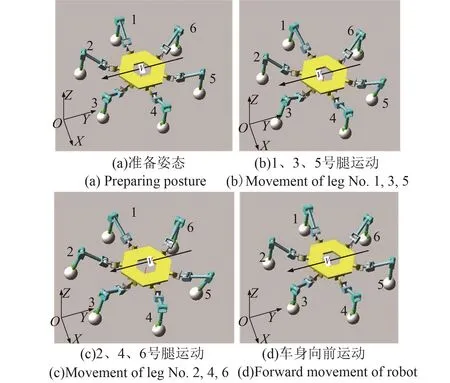
圖4 模塊化正六邊形輪腿式月面機器人直線運動簡圖圖Fig.4 Linear motion diagram of modular hexagonal wheel-legged lunar robot
月面環境復雜,所設計的輪腿式機器人具備容錯功能,所以腿數一般均多于4,綜合考慮運動控制的難易程度以及機器人運動的穩定性,六足輪腿式機器人是較優的選擇[9-10]。所以選擇六足式的直線型以及正六邊形作為典型進行對比分析。
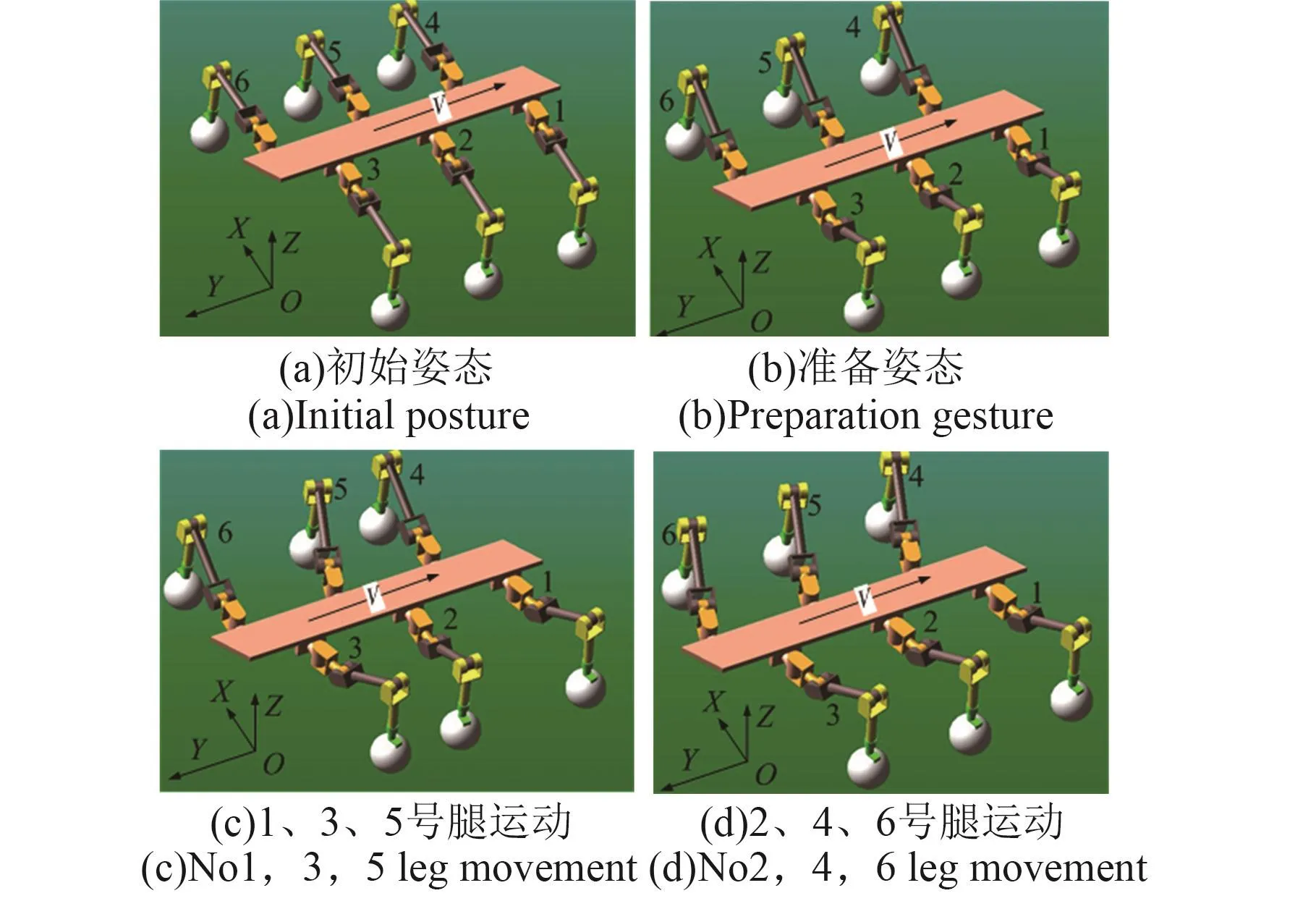
圖5 直線形構型輪腿式月面機器人直線運動簡圖Fig.5 Linear motion diagram of wheel-legged lunar robot with linear configuration
所對比的2種構型,其組成元素完全形同,并且輪腿構型以及參數也相同。兩者均采用擺腿中的“3+3”步態,進行固定周期的直線運動分析。正六邊形構型的機器人“3+3”步態直線運動規劃圖如圖6所示。
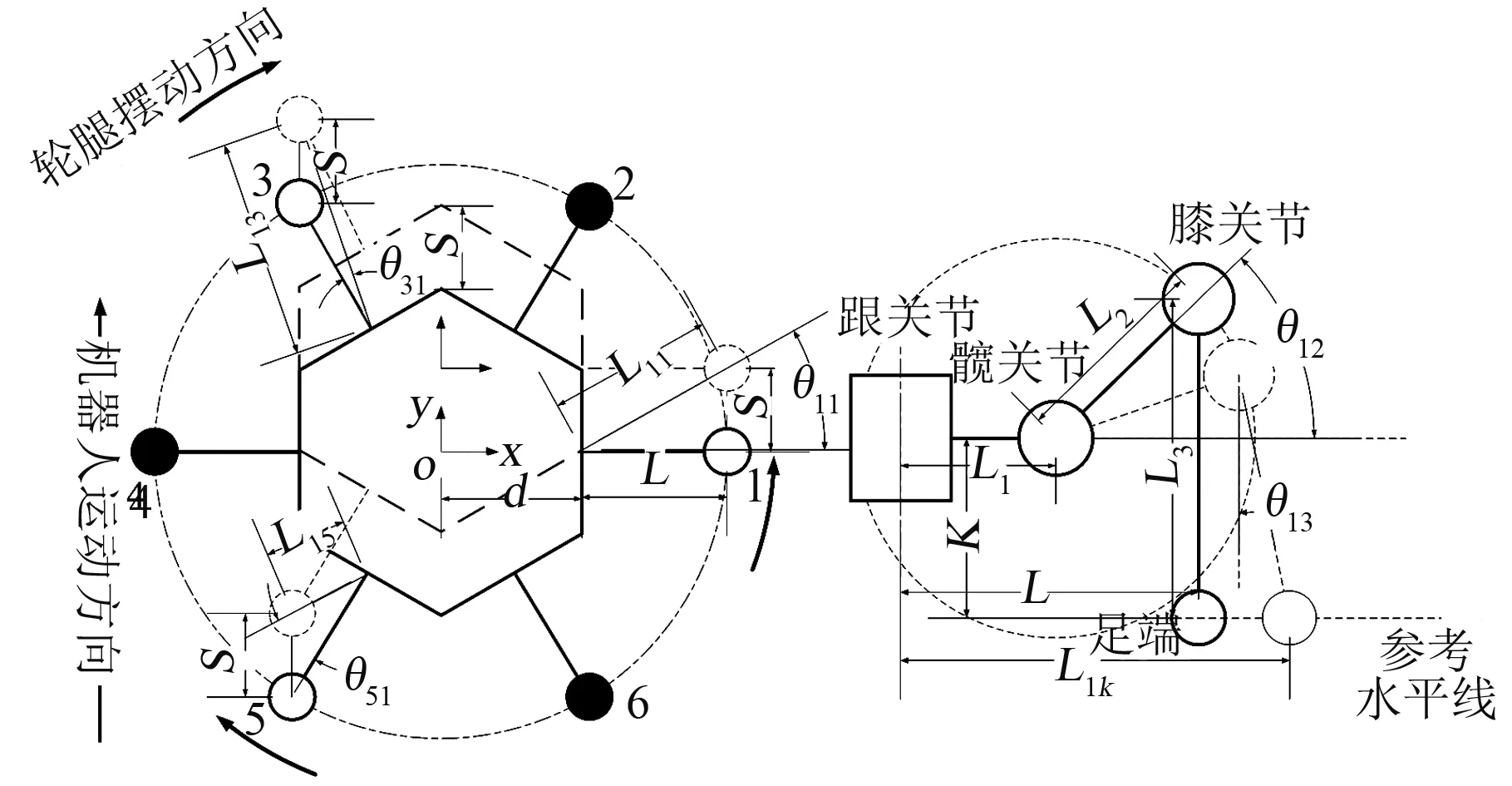
圖6 正六邊形式輪腿式機器人直線步態規劃示意圖Fig.6 Schmetic diagram of linear gait planning for regular hexagonal wheel-legged robot
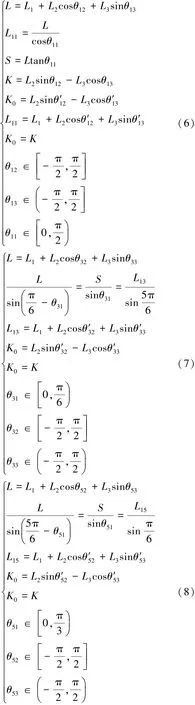
圖6 中,d是車身模塊組合后幾何中心距輪腿根關節軸線的距離;L為根關節中心到足端中心距離在水平面上的投影;L1k是第k條腿擺動后根關節中心到足端中心距離在水平面上的投影;K是根關節中心與足端中心的垂直距離(機器人車體支撐高度);S是直線步態半步長;θk1是初始狀態第k條腿根關節擺動角;θk2是初始狀態第k條腿膝關節擺動角;θ′k1是擺動狀態第k條腿根關節擺動角;θ′k2是擺動狀態第k條腿膝關節擺動角。分析可得擺動相的1、3、5號腿的運動學限制條件為式(6)~(8):
4 仿真驗證
設置仿真參數如表2。
表2 仿真參數Table 2 Simulation parameters
根據公式(6)~(8)計算得到1、3、5號腿的運動參數如表3~5所示。

表3 1號腿運動參數Table 3 Kinematic parameters of leg 1

表4 3號腿運動參數Table 4 Kinematic parameters of leg 3

表5 5號腿運動參數Table 5 Kinematic parameters of leg 5
直線型構型的機器人“3+3”步態直線運動比正六邊形構型的機器人直線步態簡單。根據規劃以及所計算的到的三條腿的運動參數,可以看出進行直線運動時,機器人的擺動相三條腿的運動各不相同。直線型構型由于腿分布在直線運動方向上對稱,擺動相三條腿的擺動運動完全相同,與正六邊形構型的機器人1號腿運動一致。通過ADAMS對正六邊形構型的輪腿式月面機器人進行仿真分析,得到擺動相三條腿各個關節運動的變化曲線如圖7~9所示。
正六邊形式的機器人足端運動在y方向的位移變化曲線如圖10、車身運動軌跡如圖11所示。
直線形構型的輪腿式月面機器人進行擺腿直線運動時,每條腿各個關節的運動規律如圖12所示。其足端運動曲線如圖13,車身運動曲線如圖14。
可見在足式直線運動中,直線型構型的機器人的運動方式以及車身在運動中的穩定性優于正六邊形構型。對比結果見表6。
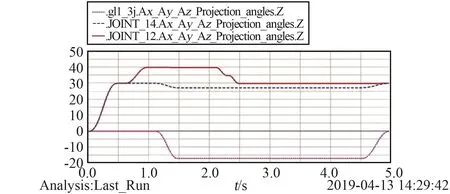
圖7 1號腿3個關節的運動曲線圖Fig.7 Motion curves of three joints of leg No.1
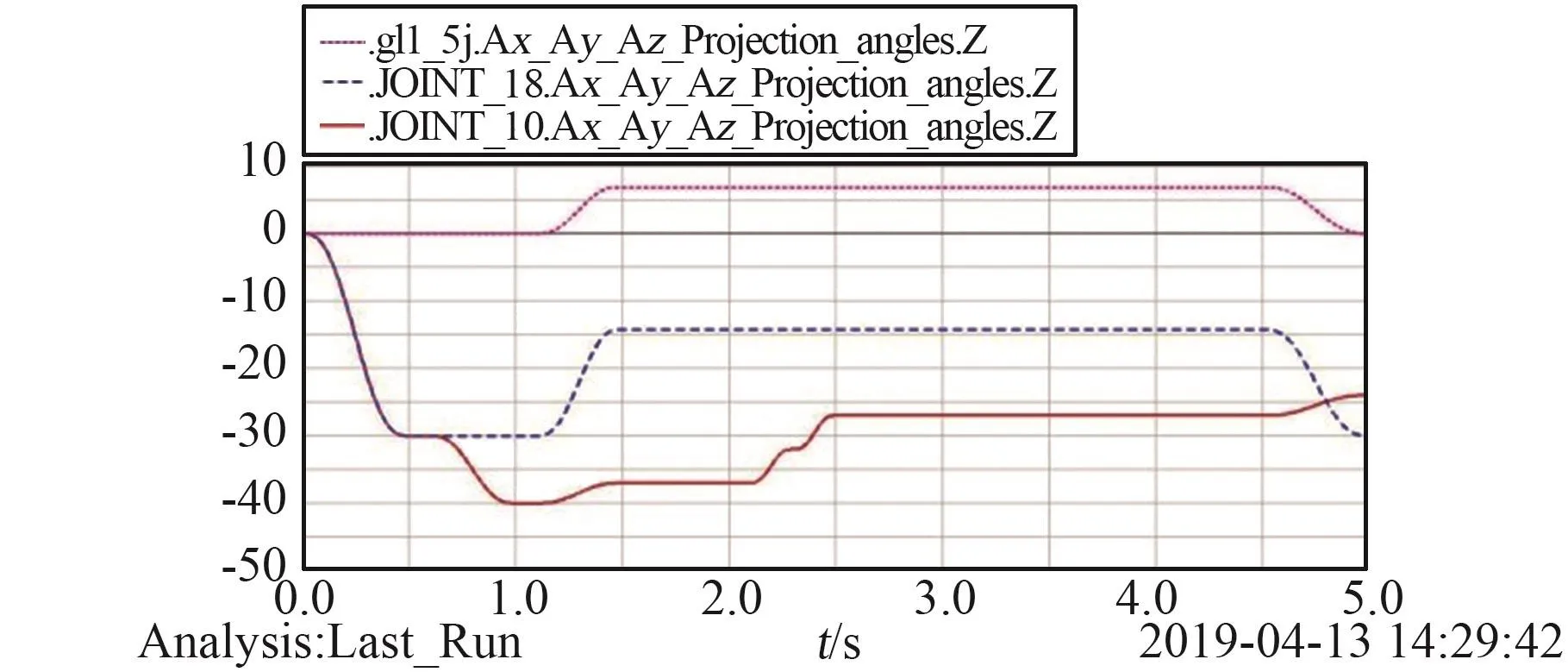
圖8 3號腿3個關節的運動曲線圖Fig.8 Motion curves of three joints of leg No.3
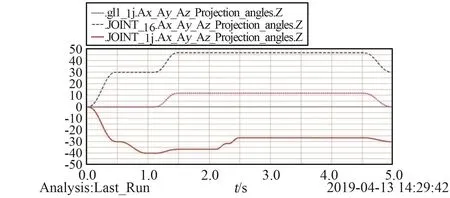
圖9 5號腿3個關節的運動曲線圖Fig.9 Motion curve of three joints of leg No.5
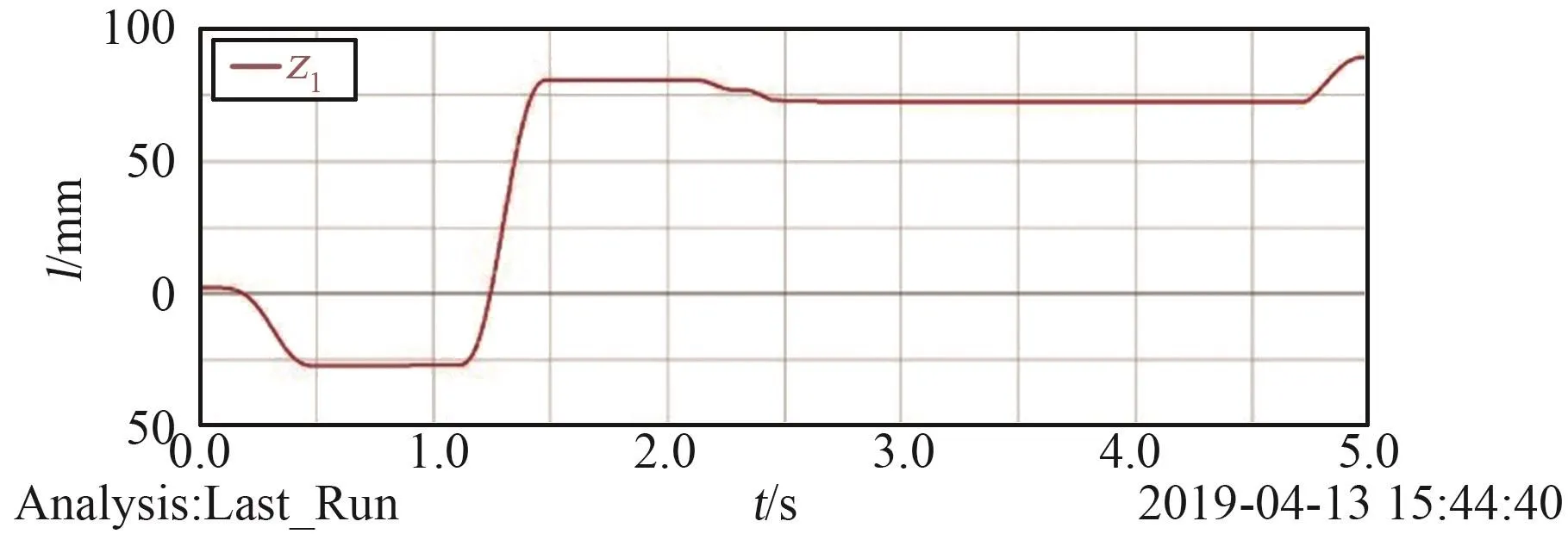
圖10 正六邊形機器人足端y方向運動位移曲線圖Fig.10 Displacement curve of feet in y-direction for hexagonal robot
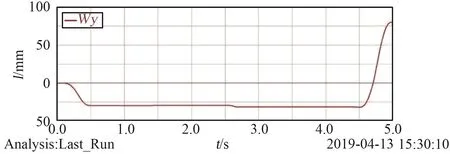
圖11 正六邊形機器人車身運動位移變化曲線Fig.11 Displacement curve of the hexagonal robot
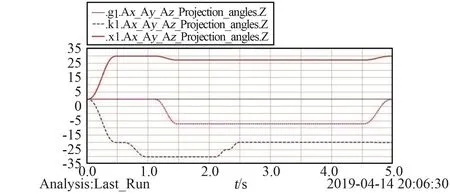
圖12 直線形機器人單腿3根關節運動規律曲線Fig.12 Motion curves of three joints of one leg in a linear robot
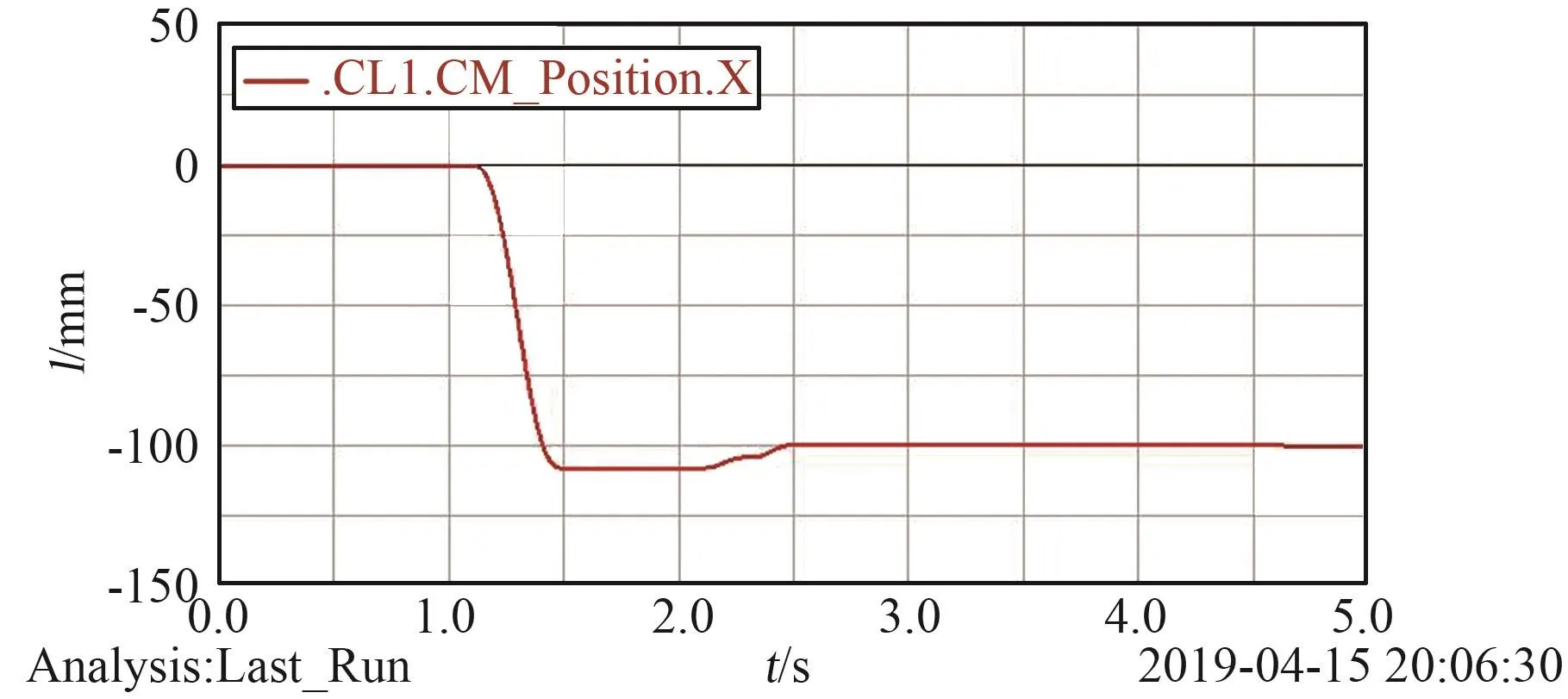
圖13 直線形六輪腿機器人足端y方向運動位移曲線圖Fig.13 Displacement curve of feet in y-direction for the hexapod wheel-legged robot
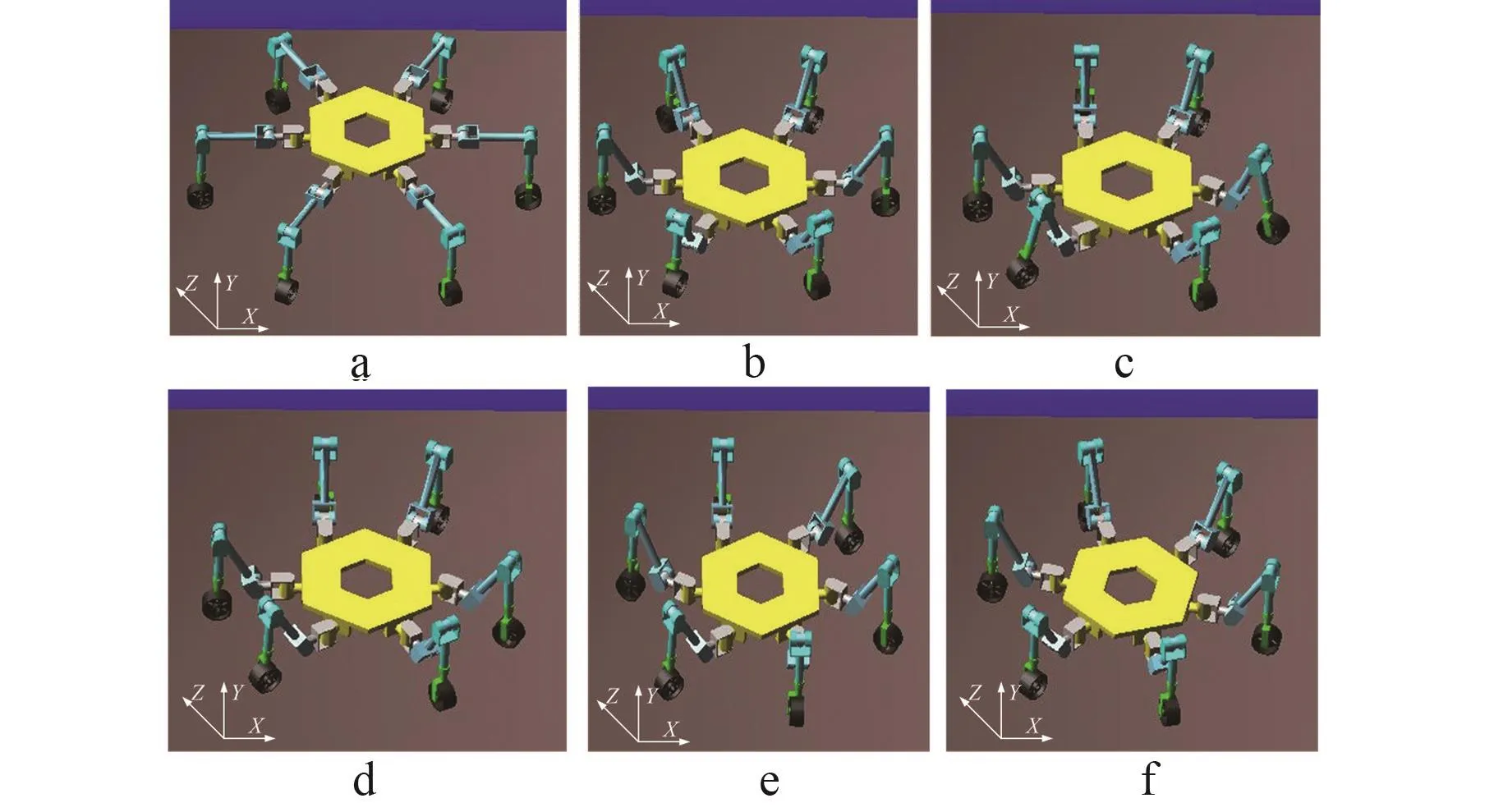
圖14 直線形六足輪腿機器人車身運動位移變化曲線Fig.14 Displacement curves of linear hexapod wheellegged robot
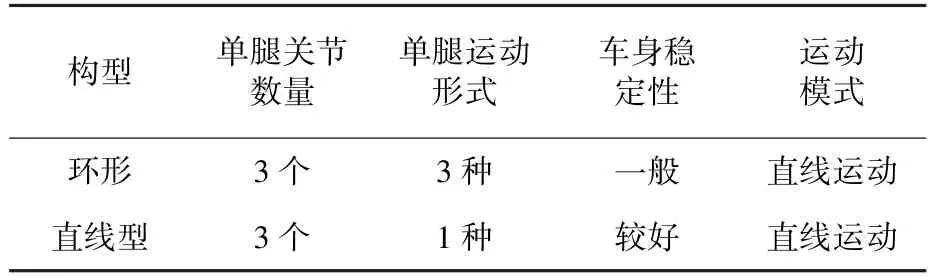
表6 對比結果Table 6 Results of contrast
5 結論
1)模塊化設計增加了輪腿式月面機器人的可重構性,使得輪腿式機器人具備多種不同的構型。
2)基于圖論的基本方法,可以對模塊化輪腿式月面機器人進行構型分析。通過建立構型圖,分析模塊之間的連接關系,最終得到了機器人構型圖及構型矩陣。此方法可為模塊化輪腿式月面機器人的構型分析提供參考,為快速搭建標準化構型提供理論基礎。
3)在相同的步態以及運動形式下,采用同種模塊組合成的直線型輪腿式月面機器人較正六邊形輪腿式月面機器人的直線運動更加平穩,仿真結果可為輪腿式月面機器人的構型選擇提供參考。
猜你喜歡
海洋信息技術與應用(2022年1期)2022-06-05 07:38:22
裝備制造技術(2021年2期)2021-07-21 05:38:44
現代裝飾(2020年5期)2020-05-30 13:01:56
汽車與新動力(2019年5期)2019-11-07 05:20:16
系統管理學報(2018年3期)2018-08-13 01:05:42
中國核電(2017年2期)2017-08-11 08:00:56
流程工業(2017年4期)2017-06-21 06:29:52
流程工業(2017年4期)2017-06-21 06:29:50
石油化工建設(2015年2期)2015-12-01 04:16:44
中國教育技術裝備(2015年10期)2015-03-01 02:41:05