炮塔轉動參數檢測系統設計
2019-10-31 04:14:07郭旻蔡振興歐陽元兵
科教導刊·電子版 2019年24期
郭旻 蔡振興 歐陽元兵
摘 要 目前炮塔轉動參數檢測方法存在測量精度偏低、操作復雜、抗干擾能力差的缺點,我們設計了一種基于MEMS慣性測量單元的炮塔轉動參數測量系統,系統由ARM主控單元,MEMS慣性測量單元,WiFi模塊,存儲模塊組成。通過在標準轉臺上的標定和在某型坦克上的實驗,該系統滿足測試精度要求,節省了人力物力,縮短了測量時間,滿足實際應用的需求。
關鍵詞 轉動參數 非接觸測量 微機電系統 炮控系統
中圖分類號:TM935文獻標識碼:A
0緒論
炮塔是安裝在裝甲車、坦克、艦艇上的瞄準發射武器系統裝置,能夠圍繞水平軸做360度無死角旋轉,并且能夠做45度角的俯仰運動,具有兩個自由度。炮塔轉動參數包括角速度量和角度量。目前測量方法主要有CCD點光源法、PSD光學測量靶法、光纖陀螺法、電測法等。這些測量方法在精度和測量靈活性上都有缺陷。我們設計了一種基于MEMS慣性測量單元的炮塔轉動參數測量裝置,用來彌補上述測量方法的不足,以滿足實際需求。
1測量原理
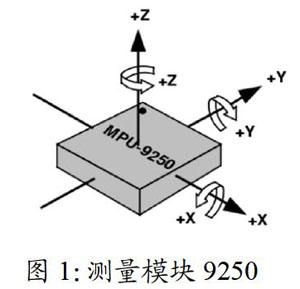
本系統主要測量的量是炮塔轉動的角速度及角度,我們選用的慣性測量單元MEMS九軸傳感器MPU9250。它包括三軸16位高精度AD組成的陀螺儀,三軸16位高精度AD組成的的加速度計與三軸6位磁力計,以及一個可擴展的數字運動處理器DMP。角速度的測量裝置主要是陀螺儀,然后輔以加速計來進行修正。角度的測量是通過陀螺儀、加速計和磁力計測量的數據信息進行融合得到的,融合后的角度即是姿態角(如圖1所示),即x軸的俯仰角Pitch、y軸的滾轉角Roll、z軸的偏航角Yaw。測量時我們只需把傳感器固定在炮管上,通過讀取MPU9250輸出的數據,即可得到炮塔轉動的角速度及角度量,其中z軸得到的是炮塔水平方向的值,x軸得到的是炮塔垂直方向的俯仰值。
2系統方案設計
我們選用MEMS結構的慣性測量傳感器件測量得到炮塔轉動的角速度和角度數據,然后經由I2C通信總線傳給測量單片機對數據進行轉換和處理。處理運算完成的數據可就地存儲,并經由無線模塊將數據實時發給上位機進行顯示。在整個測量過程中只需將測量裝置放置在炮管上,不需要其他的輔助設備。MEMS慣性測量單元屬于非接觸式傳感器,這種測量方式對現有方式有很大的創新改進,使得測量進行便捷靈活。測量數據的傳輸采用WiFi無線的形式,不需要硬件連線,便于在復雜、空間有限的調試現場進行測量。
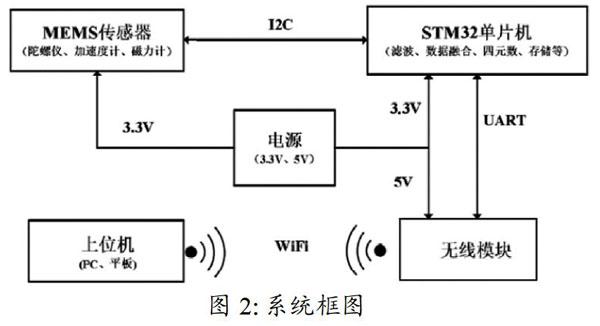
炮塔在測試機動性能時,炮管振動劇烈,而且一旦炮塔的驅動電機開啟會帶來很強的電磁干擾,這對測量上會產生很大的干擾,形成噪聲。同時MEMS慣性測量傳感器件也存在漂移的問題,積分會累計誤差,所以得運用相應的濾波算法對數據進行處理。為了減小誤差,選用多片MEMS慣性測量傳感器件進行采集數據,然后對同一時刻多片陀螺儀所采的數據進行比對復合,數據的處理及測量傳感器的驅動由ARM單片機完成。針對于不同的數據測量量采用不同的濾波方法,如角速度只需算術平均濾波便可以保證精度;而對于角度值測量,因為它的計算是由多個多軸傳感器的數據進行融合運算得出,我們采用卡爾曼濾波進行處理,以達到精度要求。系統框圖如圖2所示。
2.1系統硬件設計
系統主控芯片選用STM32F103ZET6,測量模塊為JY-901,模塊集成MPU9250,采用高性能的微處理器和先進的動力學解算與卡爾曼動態濾波算法,能夠快速求解出模塊當前的實時運動姿態,姿態測量動態精度為0.1?s,靜態精度位0.01度,穩定性極高。支持串口和I2C兩種數字接口輸出。串口速率2400bps-921600bps可調,I2C接口支持全速400K速率。
本裝置采用無線方式與上位機通信,無線WiFi模塊為HLK-RM04高性能、低成本UART-ETH-WIFI模塊。該模塊是基于通用串行接口的符合網絡標準的嵌入式模塊,內置TCP/IP協議棧,能夠實現用戶串口、以太網、無線網(WiFi)3個接口之間的轉換。它能穩定可靠的把串口數據轉成WiFi熱點,并支持全雙工工作模式。工作時只需用平板、手機、PC機等平臺安裝好專門開發的上位機便可能實現顯示和控制。
裝置在完成一次數據的測量后,會實時(下轉第279頁)(上接第268頁)的將所測得的數據顯示在上位機上。除了實時顯示所測數據外,本裝置自帶有數據存儲模塊,要將每次測量的數據自動存儲在TF卡中,這樣便于后期對所測數據的分析和參數指標標定。
2.2系統軟件設計
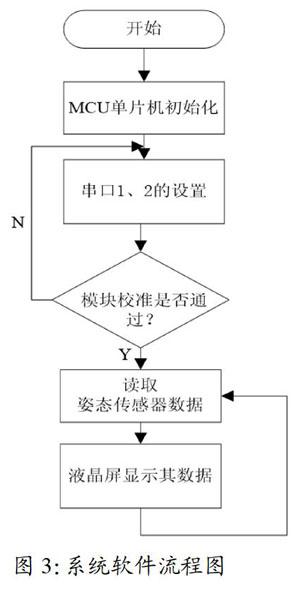
軟件部分主要包含單片機的初始化、九軸MPU6050姿態傳感器初始化以及數據讀取等等,其中單片機的初始化包括時鐘初始化、串口初始化時鐘配置以及串口1和串口2的配置,所采用的語言是C語言,系統軟件的設計主要是對算法解算、數據融合以及通過串口傳輸數據。系統的軟件設計框圖如圖3所示。
3總結
我們所設計的基于MEMS慣性測量單元的炮塔轉動參數測量系統,解決了傳感器的零漂和測量數據的突變、波動問題。通過在標準轉臺上的標定和在某型坦克上的實驗,該裝置的測量動態精度為0.1?s,靜態精度位0.01度,穩定性高。本裝置操作簡單、靈敏度高、成本較低、實用性強,能有效地提高測試精度,節省了人力物力,縮短了測量時間,滿足實際應用的需求,具有很高的實用價值。
參考文獻
[1] 張炎華,玉立端,戰興群,翟傳潤.慣性導航技術的新進展及發展趨勢[J].中國造船,2008(10):134-140.
[2] 王春忠,楊忠國,榮明,王秋良,王欽釗.基于陀螺儀的坦克炮控穩定精度檢測儀設計[J].傳感器與微系統,2009,28(01):85-87.
[3] 李華,馬曉軍,臧克茂等.電傳動坦克模糊控制器仿真研究[J].裝甲兵工程學院學報,2002(06):45-49.
[4] 朱競夫,趙碧君,王飲釗.現代坦克火控系統[M].北京:國防工業出版社,2003.
