基于加速度傳感器的豬舍刮糞板運行狀態監測裝置設計與仿真
2019-11-01 02:28:47胡振楠孫紅敏李曉明
農業與技術 2019年17期
胡振楠 孫紅敏 李曉明
摘 要:豬舍刮糞板在運行過程中可能存在清理不徹底、糞道內異物阻礙刮糞板運行、刮糞板損毀等工作人員難以監測的問題,因此設計一種基于加速度傳感器的刮糞板運行狀態監測裝置,并通過MATLAB進行仿真。通過MPU6050傳感器獲得當前狀態下刮糞板的姿態角,采集正常狀態下運行數據并運用中值濾波算法消除異常角度波動,由此確定閾值,根據不同角度閾值將刮糞板狀態不同故障類型和等級,通過判斷運行時刮糞板各與其對應閾值的關系完成對故障的識別和警報。依據預定義的刮糞板運行狀態進行MATLAB仿真測試,獲得了96.1%的平均準確率。仿真實驗表明本裝置可用于實際作業狀態下對豬舍刮糞板狀態的監測。
關鍵詞:豬舍刮糞板運行狀態;MPU6050傳感器;故障檢測;中值濾波;MATLAB仿真
引言
隨著養豬產業化的興起,規模化養豬場越來越多,也越來越大,隨之帶來的是污糞的清理問題,當前,豬場常用的清糞方式包括水沖式清糞、水泡糞清糞、干清糞[1]。其中干清糞為主流清糞方式,干清糞模式是將動物的糞便和尿液在清理過程中進行分離,然后再進行集中堆放和轉運處理,通常有人工方式和機械方式2種,現代化豬場采用機械式刮糞板清糞系統,其與其他清糞模式相比更有利于節省資源和保護環境[2]。然而,當前刮糞板式清糞仍存在一些不可忽視的問題,刮板在刮除糞污過程中可能存在運行異常,如刮板左右傾角過大而導致清理不徹底、糞道內異物影響刮板前進等情況,異常運行狀態下會導致清理不徹底,嚴重時可能導致設備損毀,這是影響刮糞設備使用壽命的重要因素。本文旨在設計一種豬舍刮糞板狀態監測裝置,可在工人無法觀測到的情況下準確識別故障,在刮糞設備運行過程中實時監控設備是否處于正常工作狀態,并可在故障發生時及時將信息反饋給工作人員,達到及時發現及時處理,能在工作人員觀察不到的地方發現故障并預警,排除潛在故障的可能、提高污糞清理設備的可靠性以及使用壽命。
1 材料與方法
1.1 實驗材料與硬件連接
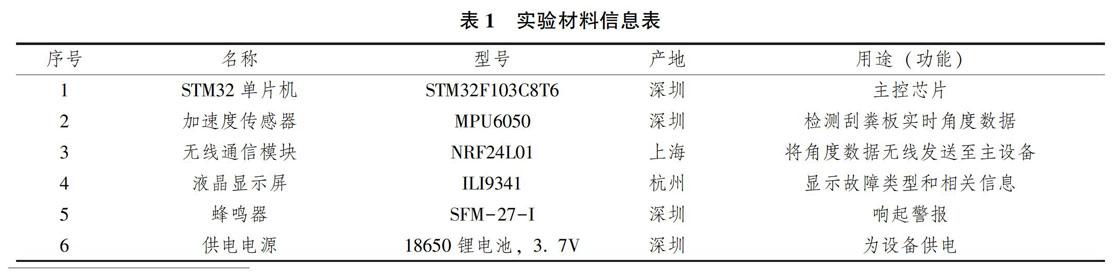
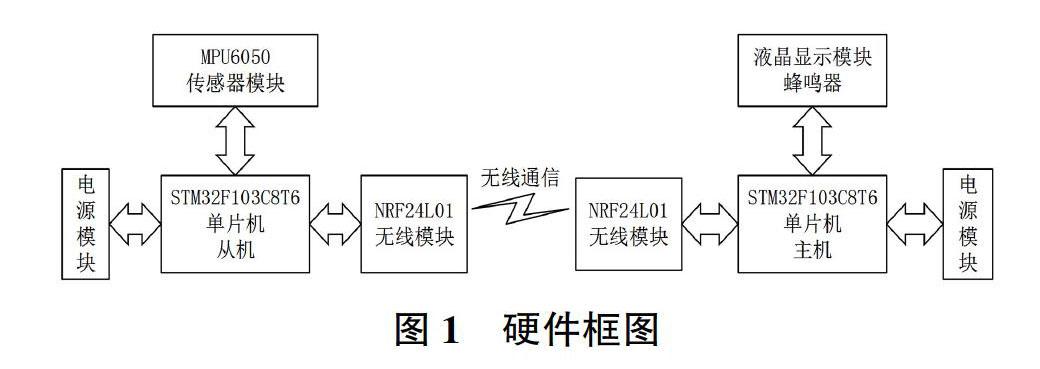
系統硬件設備分別由STM32單片機、加速度傳感器、無線通信模塊、液晶顯示屏、警報器、供電電源組成,其材料具體信息如表1所示。
主控芯片采用STM32F103,該芯片屬于中低端的32位ARM微控制器,是意法半導體(ST)公司出品,其內核是Cortex—M3。芯片集成定時器,CAN,ADC,SPI,I2C,USB,UART,等多種功能[3]。
數據收發模塊為NEF24L01,NRF24L01是由 NORDIC 生產的工作在 2.4~2.5GHz 的 ISM頻段的單片無線收發器芯片, NRF24L01 采用 SPI 通信,可以實現點對點或是1對多的無線傳輸,通信速度最高可達到2Mbps。輸出功率頻道的選擇和協議的設置可以通過 SPI 接口設置,可以連接到大多數的單片機芯片,并完成無線數據傳送工作[4]。
加速度傳感器采用MPU6050型號, MPU6050加速度傳感器模塊集成了三軸陀螺儀傳感器和三軸加速度傳感器,分別用了3個 16 位的ADC[5],并有1個可擴展的數字處理器(DMP),可將其檢測到的模擬量轉化為數字量,MPU6050傳感器模塊可控制測量范圍,提取不同速度的運動參數。通過得到的加速度和角速度能計算出歐拉角,且STM32可通過IIC總線獲取傳感器的數據值,誤差小,精度高[6]。
液晶顯示屏采用帶有ILI9341芯片控制的液晶屏,故障發生時通過液晶屏顯示出故障類型和相關信息,該芯片核心部分是位于中間的 GRAM(Graphics RAM),即顯存[7]。GRAM 中每個存儲單元對應液晶面板中的1個像素點,由自身其他模塊共同把 GRAM 存儲單元的數據轉化成液晶面板的控制信號,最終顯示程序設定的信息。
報警模塊通過簡單的蜂鳴器實現,當單片機收檢測都存在故障時,控制 PNP 型三極管導通[8],使蜂鳴器發聲報警。
供電電源選擇為鋰電池供電方式,電源模塊為2組2節串聯的鋰電池,分別為主從設備供電,2節鋰電池串聯提供7.4V電源經L298N升壓到12V,再經其轉換輸出電壓為3.3V為設備中各模塊供電。
豬舍刮糞板狀態監測裝置硬件框圖如圖1所示。
1.2 實驗設計
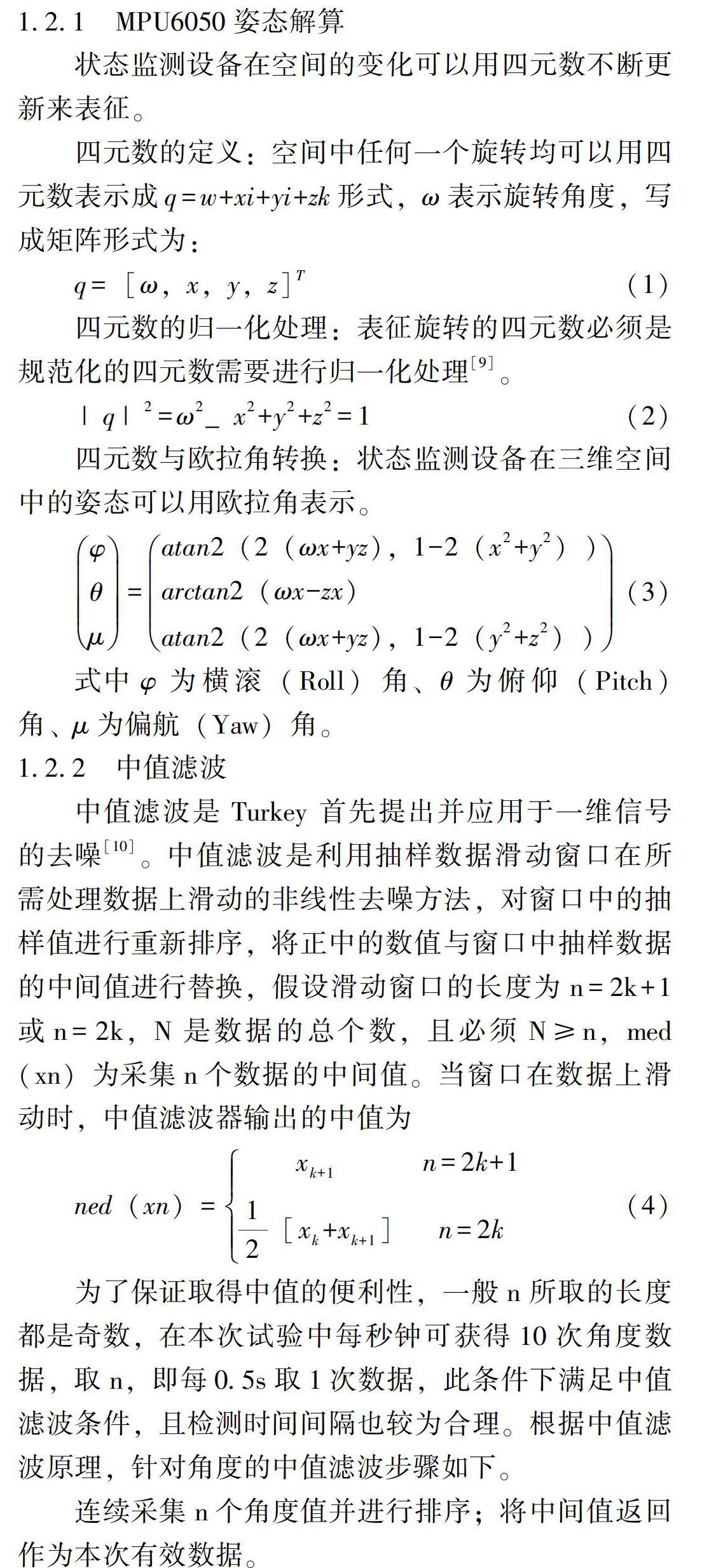
基于上述硬件系統,通過對MPU6050采集的數據進行姿態解算獲得刮糞板運行的實時角度數據,利用中值濾波算法進行數據處理,獲得較為合理的閾值,在此閾值的基礎上,對故障進行分類劃級,驗證本裝置在應用中值濾波算法的基礎上對故障類型識別的可靠性。
為了保證取得中值的便利性,一般n所取的長度都是奇數,在本次試驗中每秒鐘可獲得10次角度數據,取n,即每0.5s取1次數據,此條件下滿足中值濾波條件,且檢測時間間隔也較為合理。根據中值濾波原理,針對角度的中值濾波步驟如下。
連續采集n個角度值并進行排序;將中間值返回作為本次有效數據。
中值濾波的優點在于通過中值濾波得到的數據總是可以在輸入的原始角度數據中找到,不增加新的數據,保證了數據分析的準確性。
角度檢測的過程中存在偶然因素引起的短時間內角度巨幅波動,對閾值的選取可能帶來巨大誤差,中值濾波方法能有效排除這種由偶然因素產生的波動,最終使閾值貼近真實數據。
下圖為通過中值濾波處理過的數據與原始數據的對比圖,如圖2所示。
原始數據在4.5~5s、5~5.5s、7.5s出現巨幅波動,這種情況由偶然因素引起,濾波后使得角度值更貼近真實值,使用中值濾波的作用在于使得閾值確定更為真實、合理、準確,以免閾值取得過高,在故障發生時不能有效的予以檢測警報。
1.2.3 確定閾值
閾值的確定是故障檢測的前提,基于MPU6050姿態解算獲取的實時角度數據和中值濾波處理,可以獲取一組正常運行狀態的橫滾角(R)、俯仰角(P)、偏航角(Y)的波動范圍,正常運行狀態下R、P、Y均在±5°內波動。正常運行狀態下的3個角度的數據20組,取每組R、P、Y波動的最大范圍作為每組的閾值,最后取各角平均閾值作為最終閾值,其中橫滾角的閾值為HR=±4.9°、俯仰角的閾值為HP=±4.7°、偏航角的閾值為HY=±4.9°。
以橫滾角為例,正常與故障狀態下橫滾角變化的情況如圖3。
在運行過程中,橫滾角在4~5.5s、6.5~7.5s間出現正向傾斜,其傾角超過閾值,在5.5~6.5s角出現反向傾斜,其傾角超過閾值,此種情況應發出警報。
2 系統仿真與結果
在本次實驗中,研究對象為刮糞板,參數為該刮糞板運行時的橫滾角(R),俯仰角(P),和偏航角(Y),對于每個角度都對其設置了相應的閾值,分別為HR、HP、HY,超過閾值范圍則處于異常狀態,由此,不同的角度組合出來的故障類型也各不相同,為了在發出警報時能反饋準確的故障信息,將故障進行分類劃級,詳細如表2。
不同的角度異常引起的故障也各不相同,嚴重程度也不相同,對此,將故障細分為7種類型3個等級,其中污糞清理不徹底為第3等級,糞道下由異物阻礙刮糞板運行為第2級,出現嚴重故障為第1級別,針對不同等級故障予以不同類型的警報方式。
對應上表不同運行狀態下各角的波動如圖4所示。
根據上述存在的各類運行狀態,我們為檢測設備設計故障分類器,輸入當前狀態下各角度值,經分類5所示。
本系統包含主從設備,其中從設備負責采集傳感器信息并通過姿態解算獲得當前狀態下的角度值,將數據發送至主設備,主設備經初始化后設置各角閾值,然后不斷接收數據,經中值濾波器處理獲得較為準確的角度值,再經故障分類器進行故障分類,對不同類型故障類型給出不同處理方式,如果是1級故障則立即響起警報,如是其他類型故障則記錄相應故障類型和故障位置,待運行結束后將故障信息通過液晶屏反饋給工作人員,在刮糞板運行過程中,實時角度都會對應一個時間t,由此通過設定電機的轉速來確定刮糞板的運行速度v,當故障發生時,通過s=vt 得知刮糞板出現故障的位置距離s,整個監測系統流程圖如圖6所示。
通過實驗模擬表2中的8種刮糞板運行狀態,針對每種運行狀態采集100組角度數據,應用前文所確定的各角度閾值,利用得到的數據進行MATLAB仿真,仿真結果如表3所示,其中W1~W8對應8種狀態的測試組,W1~W8分別代表正常、故障1至故障7,G1~G8代表8種狀態的結果組,G1~G8分別代表正常、故障1至故障7。本次仿真實驗的平均準確率為96.1%。
3 討論與分析
基于仿真結果,正常狀態下的測試組檢測為正常的準確率為100%,表明在在實際作業狀態下的刮糞板不會將正常狀態誤報為故障,在W2、W3、W5分別為單個角度故障類型,在此種狀態下,有96.7%的準確率,有3.3%的概率誤將故障檢測為正常,此種狀態為3級故障,不影響使用,W4、W6、W7為2級故障狀態下有94.3%準確率,其1%的概率檢測為正常,4.7%檢測為3級故障,W8狀態下為99%能檢測到該類故障,其中僅有1%檢測為2級故障,在實際作業中,該準確率可以滿足作業要求。但是在此結果中我們發現,在測試組G4和G6組,在誤報的幾種類型中,誤報為W3類型較少分別各1例,說明在俯仰角相對于橫滾角和偏航角更不易檢測出來,俯仰角對應的閾值設置偏高,為進一步提高準確率,應合理降低該角對應的閾值。
4 結論
本文通過對刮板式刮糞板運行狀態的研究,對不同的故障狀態和危害程度予以分類劃級,根據不同角度的閾值設計出針對不同故障的檢測裝置,獲得了較高的準確率。隨著我國養豬產業逐步過渡為規模化養殖,大量的清糞設備成為豬場的必需,本裝置能對刮糞板的運行進行狀態監測并能對不同故障予以不同程度的警報,對于清糞設備的維護和使用具有重要意義。本裝置在準確率方面還有提升空間,需要在后續的研究中設計更加準確且合理的閾值確定方法。
參考文獻
[1] 吳志娟,李文剛,焦福林,等.規模化豬場的糞便處理與利用[J].畜禽業,2017,28(6):46-48.
[2] 賈立松,韓華,魏傳祺,等. 刮糞板清糞系統在現代化豬場的應用[J].當代畜牧,2017(2):53-55.
[3] 梁龍兵,李楊,顧玲玲,等.基于STM32F103的健身裝置的設計[J].電子世界,2018(8):167-169.
[4] 張春艷,蔣 鵬.基于STM32F103控制的NRF24L01多路無線通信設計[J].現代工業經濟和信息化,2017,7(12):97-98.
[5] 王 亮,沈俊杰. 基于兩輪自平衡車的姿態數據處理[J].工業控制計算機,2018,31(11):11-13.
[6] 陳才,張弘,羅蓉,等.基于MPU6050傳感器的踝足矯形器設計[J].現代計算機(專業版),2018(10):65-68.
[7] 張興武,趙慶志,張林華,等.基于STM32F103的嵌入式圖像采集系統[J].山東理工大學學報(自然科學報),2018(5):23-26.
[8] 常浩,王金江,朱亞培,等.基于STM32F103C8T6的多功能盆栽自動澆水裝置的設計[J].科技經濟導刊,2018,26(28):11-13.
[9] 張平,劉祚時.基于慣性傳感器MPU6050的手勢識別方法[J].傳感器與微系統,2018,37(01):46-53.
[10] 龔夢龍.中值濾波結合小波變換在光譜去噪中的應用[J].科技與創新,2018(12):152-154.
