基于Hollysys軟件的CFB鍋爐水位監控系統設計
2019-11-01 09:10:59劉濤張爽
數字技術與應用 2019年7期
劉濤 張爽
摘要:研究了循環流化床鍋爐(CFB)汽包水位監控系統的設計問題,以Hollysys DCS軟件為監控平臺完成鍋爐水位監控系統的網絡與硬件組態設計,設計采用根據鍋爐負荷(發電功率)自動完成單沖量與三沖量無擾切換的控制策略對汽包水位進行監控,通過Simulink的仿真平臺對汽包水位控制方案進行隨機擾動測試,測試結果表明該控制系統能迅速的克服鍋爐蒸汽與給水流量的隨機擾動,保證鍋爐汽包水位的平穩運行,實驗結果證明此鍋爐水位控制系統設計方案的可行性與有效性,為循環流化床鍋爐水位平穩、高效、可靠運行提供了的新設計方法。
關鍵詞:循環流化床鍋爐;控制系統;系統網絡;組態設計;控制邏輯
中圖分類號:TP23 文獻標識碼:A 文章編號:1007-9416(2019)07-0007-03
0 引言
循環流化床鍋爐(CFB)則是一種新型清潔高效的燃煤燃燒技術[1],同時也是石化和電力企業生產過程中的主要的動力設備和能量來源。鍋爐汽包水位是鍋爐運行的重要參數,它反映了鍋爐蒸汽量與給水流量之間的動態平衡關系,汽包水位過高會導致蒸汽帶液,對后續生產過程的轉動設備產生汽蝕影響;水位過低則會破壞鍋爐自身的水循環影響運行效率,嚴重時會帶來干鍋和鍋爐爆炸的危險[2],因此必須對鍋爐汽包水位控制在運行合理的范圍內,對鍋爐汽包水位影響的主要干擾因素為蒸汽流量和給水流量。
本文針對電廠CFB鍋爐多輸入多輸出[3]、大滯后[4]、強耦合[5]的特點,采用基于Hollysys DCS系統軟件平臺對CFB鍋爐水位控制系統進行硬件和控制邏輯組態設計,設計根據發電功率自動無擾切換的水位控制策略對汽包水位進行控制,通過Simulink的仿真實驗驗證該控制系統對抗擾動的快速性與有效性。
1 控制系統的網絡與硬件設計
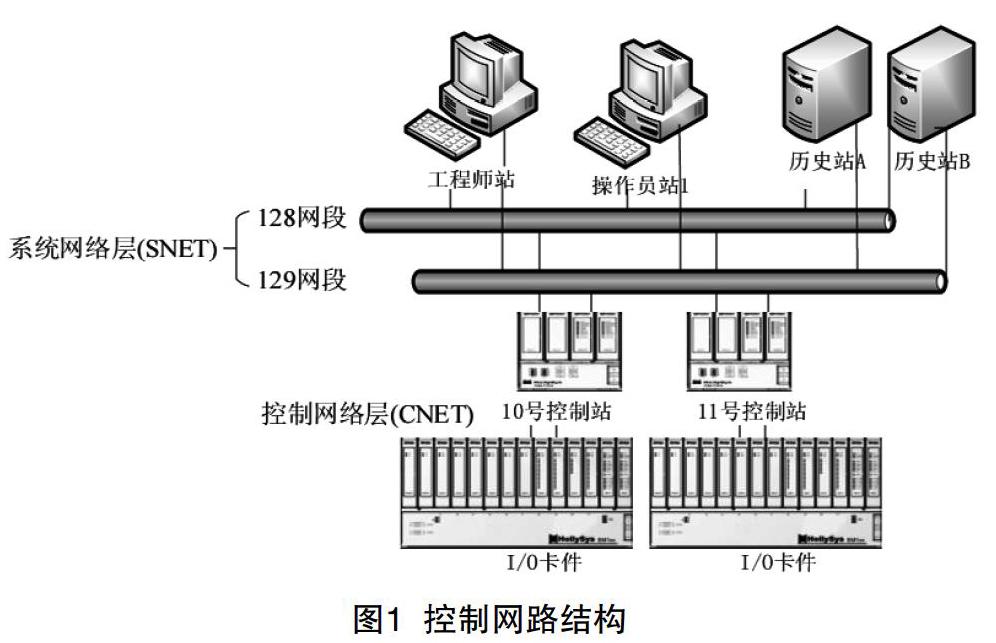
本設計采用Hollysys DCS系統平臺對CFB鍋爐水位控制系統進行網絡組態,為保證控制網絡的可靠性,網絡配置采用互為冗余的128、129雙網絡結構,控制網絡分為系統網絡層(SNET)和控制網絡層(CNET),結構如圖1所示。
(1)系統網絡層設計包括:工程師站1臺、操作員站1臺、歷史站2臺、現場控制站2個、交換機等設備,其中歷史站、交換機采用冗余配置以確保現場鍋爐汽包水位監控數據及控制指令傳遞的及時性和可靠性。
(2)控制網絡層硬件設計包括:SM920電源模塊、SM220主控模塊、SM512/510模擬量輸入/輸出模塊、SM610/711開關量輸入/輸出模塊,其中現場控制站的電源模塊和主控模塊設計采用冗余的硬件配置,主控模塊通過Profibus-DP現場總線協議與 I/O數據模塊通信并讀取現場鍋爐汽包水位、蒸汽流量與給水流量運行的工況參數,監控系統按照預先設計的控制邏輯進行操作與控制以保證鍋爐汽包水位的穩定與安全。
2 控制系統的監控方案設計
2.1 控制方案設計
鍋爐汽包水位是一個典型的非自衡系統,鍋爐在生產運行時汽包內充滿了含有大量蒸汽汽泡的水,并且蒸汽汽泡的量會隨著汽包內的壓力和爐膛溫度的變化而變化,當鍋爐負荷增加時蒸汽用量上升,會造成汽包內壓力下降致使汽包內水沸騰加劇,此時汽包的水位因在其內汽泡體積增大而升高形成虛假水位。給水流量的增加對汽包水位的影響不是立刻上升的,由于給水溫度和汽包內水溫度存在溫差,使一部分蒸汽汽泡消失使總體積變小,所以汽包水位不會馬上增加會表現出一定的慣性和滯后。
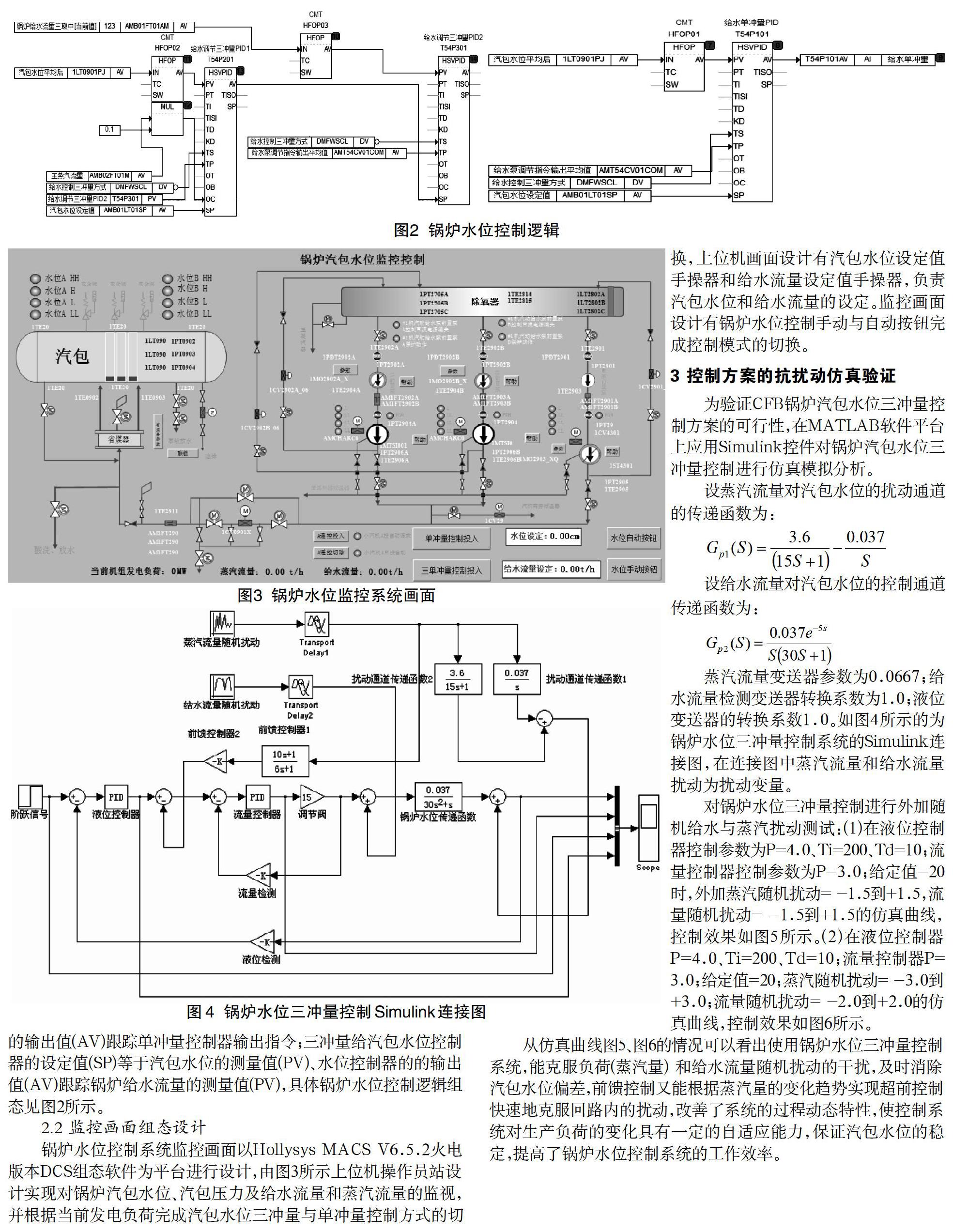
針對以上蒸汽流量和給水流量對鍋爐汽包水位影響的特點,本文設計采用根據發電負荷來實現單沖量水位控制與三沖量水位控制自動無擾切換的控制策略,即負荷在30%額定負荷以下采用單沖量控制;在30%額定負荷以上采用三沖量控制,在自動控制方式切換時,設計采用單沖量控制器與三沖量控制器輸出互為跟蹤的方式,實現兩控制器間的無擾切換,即在三沖量給水控制方式時,單沖量控制器的設定值(SP)等于鍋爐汽包水位的測量值(PV)、單沖量控制器的輸出值(AV)跟蹤三沖量控制器輸出指令,在三沖量控制方式時,引入主蒸汽流量值乘以前饋系數對三沖量汽包水位控制器的設定值進行修正與補償;在單沖量控制方式時,三沖量給水流量控制器的設定值(SP)等于鍋爐給水流量的測量值(PV)、給水流量控制器的輸出值(AV)跟蹤單沖量控制器輸出指令;三沖量給汽包水位控制器的設定值(SP)等于汽包水位的測量值(PV)、水位控制器的的輸出值(AV)跟蹤鍋爐給水流量的測量值(PV),具體鍋爐水位控制邏輯組態見圖2所示。
2.2 監控畫面組態設計
鍋爐水位控制系統監控畫面以Hollysys MACS V6.5.2火電版本DCS組態軟件為平臺進行設計,由圖3所示上位機操作員站設計實現對鍋爐汽包水位、汽包壓力及給水流量和蒸汽流量的監視,并根據當前發電負荷完成汽包水位三沖量與單沖量控制方式的切換,上位機畫面設計有汽包水位設定值手操器和給水流量設定值手操器,負責汽包水位和給水流量的設定。監控畫面設計有鍋爐水位控制手動與自動按鈕完成控制模式的切換。
3 控制方案的抗擾動仿真驗證
為驗證CFB鍋爐汽包水位三沖量控制方案的可行性,在MATLAB軟件平臺上應用Simulink控件對鍋爐汽包水位三沖量控制進行仿真模擬分析。
設蒸汽流量對汽包水位的擾動通道的傳遞函數為:
設給水流量對汽包水位的控制通道傳遞函數為:
蒸汽流量變送器參數為0.0667;給水流量檢測變送器轉換系數為1.0;液位變送器的轉換系數1.0。如圖4所示的為鍋爐水位三沖量控制系統的Simulink連接圖,在連接圖中蒸汽流量和給水流量擾動為擾動變量。
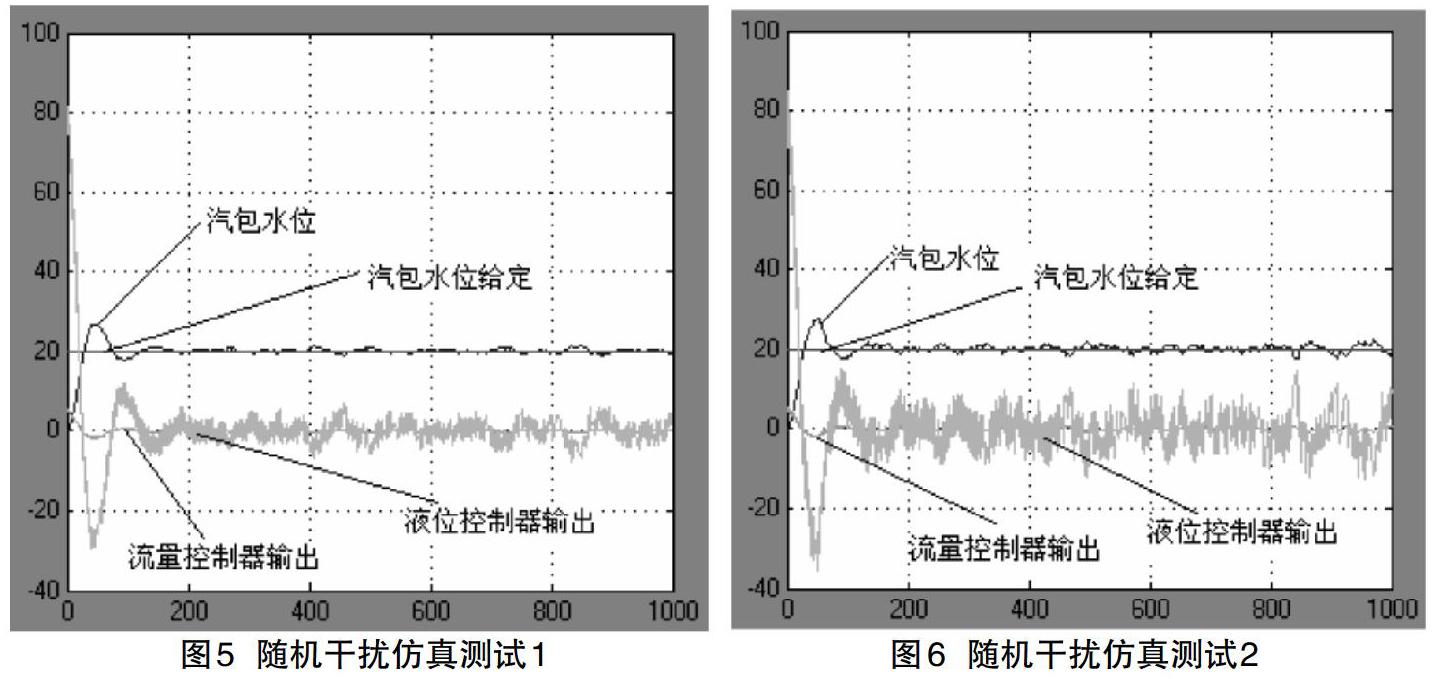
對鍋爐水位三沖量控制進行外加隨機給水與蒸汽擾動測試:(1)在液位控制器控制參數為P=4.0、Ti=200、Td=10;流量控制器控制參數為P=3.0;給定值=20時,外加蒸汽隨機擾動= -1.5到+1.5,流量隨機擾動= -1.5到+1.5的仿真曲線,控制效果如圖5所示。(2)在液位控制器P=4.0、Ti=200、Td=10;流量控制器P= 3.0;給定值=20;蒸汽隨機擾動= -3.0到+3.0;流量隨機擾動= -2.0到+2.0的仿真曲線,控制效果如圖6所示。
從仿真曲線圖5、圖6的情況可以看出使用鍋爐水位三沖量控制系統,能克服負荷(蒸汽量) 和給水流量隨機擾動的干擾,及時消除汽包水位偏差,前饋控制又能根據蒸汽量的變化趨勢實現超前控制快速地克服回路內的擾動,改善了系統的過程動態特性,使控制系統對生產負荷的變化具有一定的自適應能力,保證汽包水位的穩定,提高了鍋爐水位控制系統的工作效率。
4 結語
本文以電廠CFB鍋爐汽包水位為被控對象,研究實現了基于Hollysys軟件的CFB鍋爐水位監控系統的設計,控制方案設計采用根據發電功率自動無擾切換的水位控制策略,對汽包水位進行控制,控制系統監控畫面以Hollysys MACS V6.5.2 DCS組態軟件進行監控畫面組態設計,完成對鍋爐汽包水位的監控與控制模式的切換。通過對鍋爐水位三沖量控制方案進行仿真分析,對控制系統外加蒸汽流量與給水流量隨機擾動后,控制系統能根據擾動迅速動作,克服負荷(蒸汽量) 和給水流量的干擾,使鍋爐汽包水位始終保持穩定的狀態,仿真控制效果證明了此控制方案對鍋爐汽包水控制的可行性與有效性。
參考文獻
[1] 于希寧,王慧,王東風,等.模糊控制在循環流化床鍋爐床溫控制中的應用[J].華北電力大學學報,2005,32(3):43-46.
[2] 云蘇和.循環流化床鍋爐控制系統先進控制技術應用[J].石油化工自動化,2018,54(2):33-34.
[3] 王萬召,王紅閣,譚文.智能解耦控制器在循環流化床鍋爐燃燒系統中的應用[J].動力工程,2009,29(8):757-760.
[4] 席學軍,姜學智,李東海,等.循環流化床鍋爐燃燒系統的自抗擾控制[J].清華大學學報(自然科學版),2004,44(11):1575-1579.
[5] 傅彩芬,譚文.循環流化床鍋爐燃燒系統的控制研究[J].熱能動力工程,2016,31(2):66-67.
