抗噪高清圖像清晰度評價算法的研究
2019-11-01 09:10:59張騰騰雷靜思
數字技術與應用 2019年7期
張騰騰 雷靜思
摘要:監控攝像機的圖像在夜晚黑白模式下噪點較多,為解決在高噪聲下清晰度評價函數效果差的問題,首先提出一種使用斜條形窗口的條形區域選擇方法大幅度縮減高清圖像的運算量,之后提出一種使用清晰度評價因子來修正Laplace算子檢測結果的清晰度評價算法。該算法首先對圖像進行均值加權濾波,在縮小圖像尺寸的同時進行降噪處理,對濾波后的圖像進行Laplace算子清晰度計算,獲取其清晰度值,之后使用像素區間比例因子和歸一化鄰近差值兩種計算方法對濾波后的圖像進行處理得到清晰度評價因子,使用該因子對清晰度值進行修正。仿真實驗表明,其在高噪聲下仍能具有快速良好的評價效果。
關鍵詞:圖像清晰度評價;條形窗口;清晰度評價因子;均值加權濾波;Laplace算子
中圖分類號:TP391.41 文獻標識碼:A 文章編號:1007-9416(2019)07-0117-05
0 引言
由于集成電路和數字化的高速發展,高清圖像已經越來越多的被人們所接受。在視頻監控行業中,高清4K分辨率已經得到快速的應用,但隨著圖像數據的迅速增加清晰度評價算法計算時間也不斷增加。降低計算時間的方法主要通過采用高性能專用處理器、簡化清晰度評價函數以及選擇合適的清晰度評價窗口。
傳統的圖片窗口選擇算法有固定區域選擇算法[1]和自適應窗口選擇算法[2],前者主要使用一個或者多個固定窗口來選擇圖片區域,其都具有一個特點,即窗口為方形或者圓形等大片局部圖像窗口[1],對于4K分辨率的圖片來說,在很大一片區域中圖像有可能是不存在物體細節的,即方形或者圓形窗口中是均勻單一的背景,即使使用512*512像素范圍也有可能出現細節成分少的情況,這將不利于圖像清晰度檢測。后者主要通過全圖檢測后自動選擇評價窗口,此法更不可取,因為對于4K分辨率的圖像來說全圖檢測計算將會消耗大量時間。清晰度評價函數必須具有高靈敏性、單峰型和抗干擾性[6],傳統的清晰度評價函數有基于灰度值計算的函數[2-6],其特點是計算速度快,但易受噪聲影響,變換域[1,4,6]針對大圖片計算量大,但抗噪效果好。對于噪聲的抑制有兩種方法[7],第一種使用噪聲檢測和噪聲消除的方法進行去噪處理,第二種是使用濾波方式進行降噪處理,由于只針對部分圖像處理,故相比較去噪而言,降噪處理更為合適,濾波效果會在一定程度上削弱細節成分,但這種削弱是整體性的,即無論圖片是否清晰都減少了細節成分。
1 斜條形窗口選擇方法
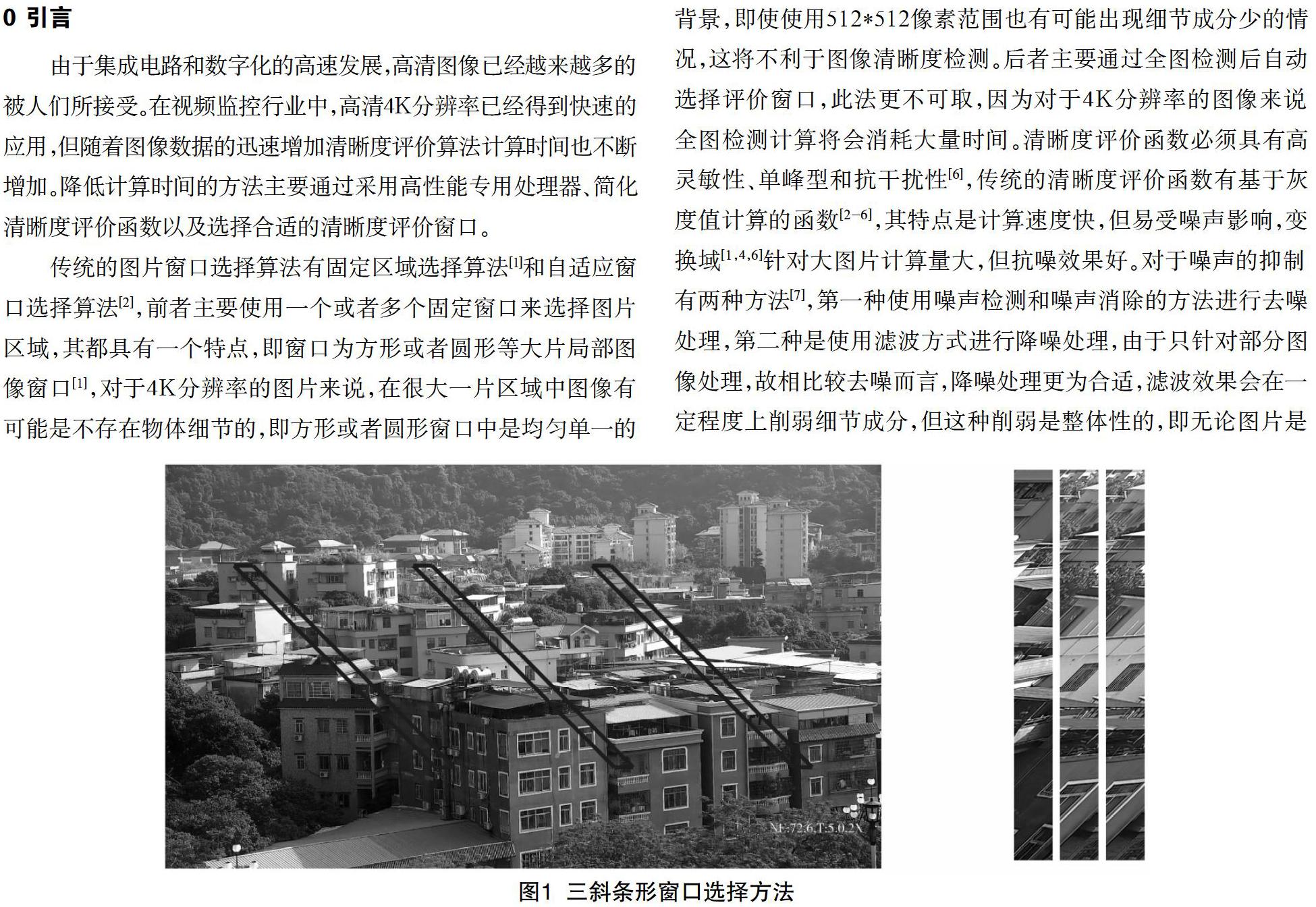
在4K圖像處理中,由于場景復雜,當物體較大時,其在圖像中將會占據一定區域的像素,這就會導致傳統窗口選擇區域中不含細節或者細節較少[2]。為了防止傳統的圓形、方形等集中塊式窗口選擇方法產生的以上問題,本研究使用條形分散式窗口方法,但由于圖像物體一般為水平或者垂直分布,故使用傾斜的條形區域盡可能分散窗口。為防止一個窗口帶來的誤判斷,本研究使用3個斜條形窗口進行評價,如圖1窗口選取圖。
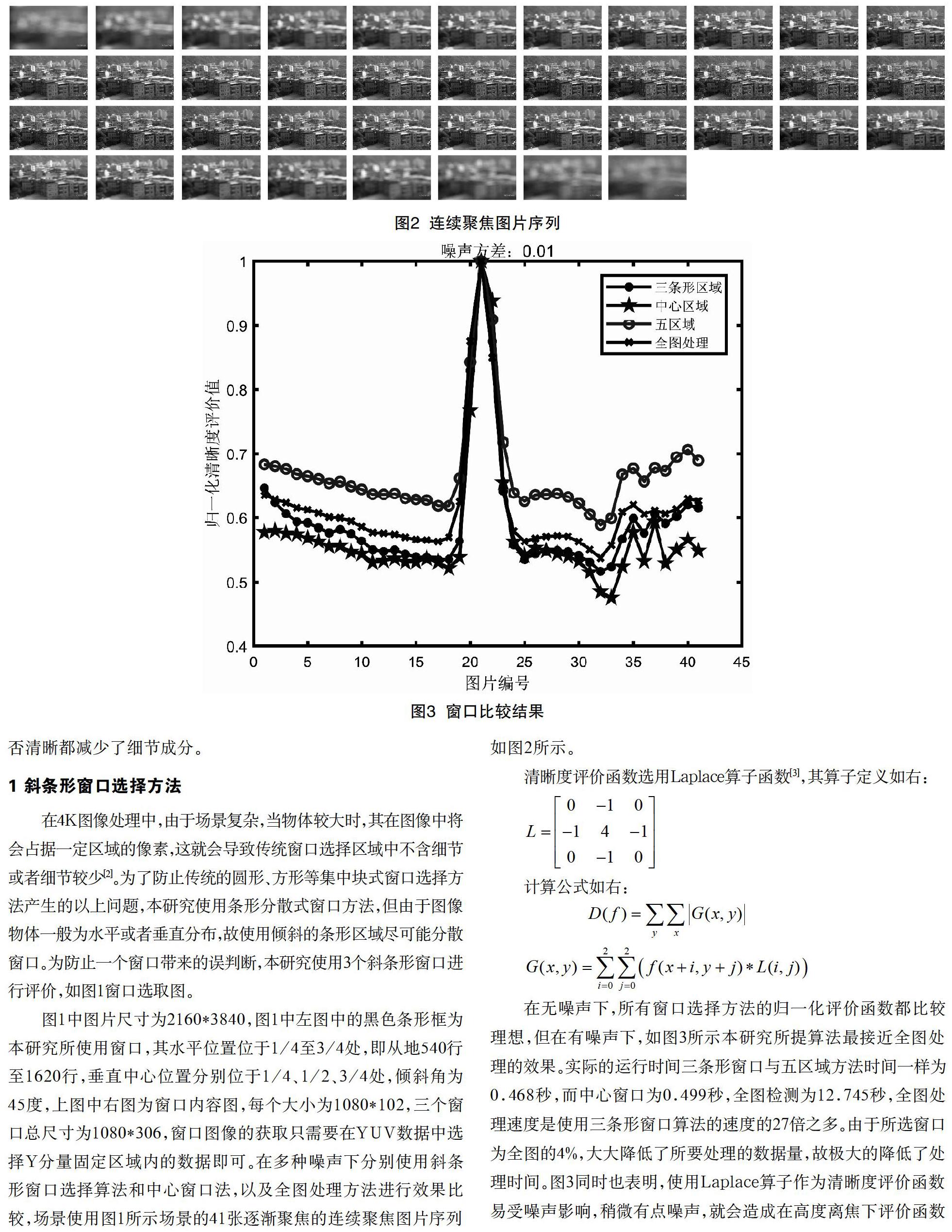
圖1中圖片尺寸為2160*3840,圖1中左圖中的黑色條形框為本研究所使用窗口,其水平位置位于1/4至3/4處,即從地540行至1620行,垂直中心位置分別位于1/4、1/2、3/4處,傾斜角為45度,上圖中右圖為窗口內容圖,每個大小為1080*102,三個窗口總尺寸為1080*306,窗口圖像的獲取只需要在YUV數據中選擇Y分量固定區域內的數據即可。在多種噪聲下分別使用斜條形窗口選擇算法和中心窗口法,以及全圖處理方法進行效果比較,場景使用圖1所示場景的41張逐漸聚焦的連續聚焦圖片序列如圖2所示。
清晰度評價函數選用Laplace算子函數[3],其算子定義如右:
計算公式如右:
在無噪聲下,所有窗口選擇方法的歸一化評價函數都比較理想,但在有噪聲下,如圖3所示本研究所提算法最接近全圖處理的效果。實際的運行時間三條形窗口與五區域方法時間一樣為0.468秒,而中心窗口為0.499秒,全圖檢測為12.745秒,全圖處理速度是使用三條形窗口算法的速度的27倍之多。由于所選窗口為全圖的4%,大大降低了所要處理的數據量,故極大的降低了處理時間。圖3同時也表明,使用Laplace算子作為清晰度評價函數易受噪聲影響,稍微有點噪聲,就會造成在高度離焦下評價函數值異常升高。
2 修正的Laplace算子梯度函數
由于Laplace算子是基于梯度的檢測方法[3],其對于噪聲非常敏感,稍有噪聲就會造成清晰度評價函數異常,經對含有噪點的模糊圖像和含有噪點的清晰圖像的分析發現,噪聲的存在會加大相鄰像素差值,對于4K分辨率的圖像來說,相鄰像素改變量很小,只有在圖像清晰時的邊緣才會出現大的跳動,故可以通過濾波方式進行降噪,濾波降噪有很多方法,在文獻[8]中將濾波與邊緣檢測相結合獲得了較好的效果,依照該思路本文采用局部均值濾波并加權的方式來減小噪聲的影響。
2.1 均值加權濾波
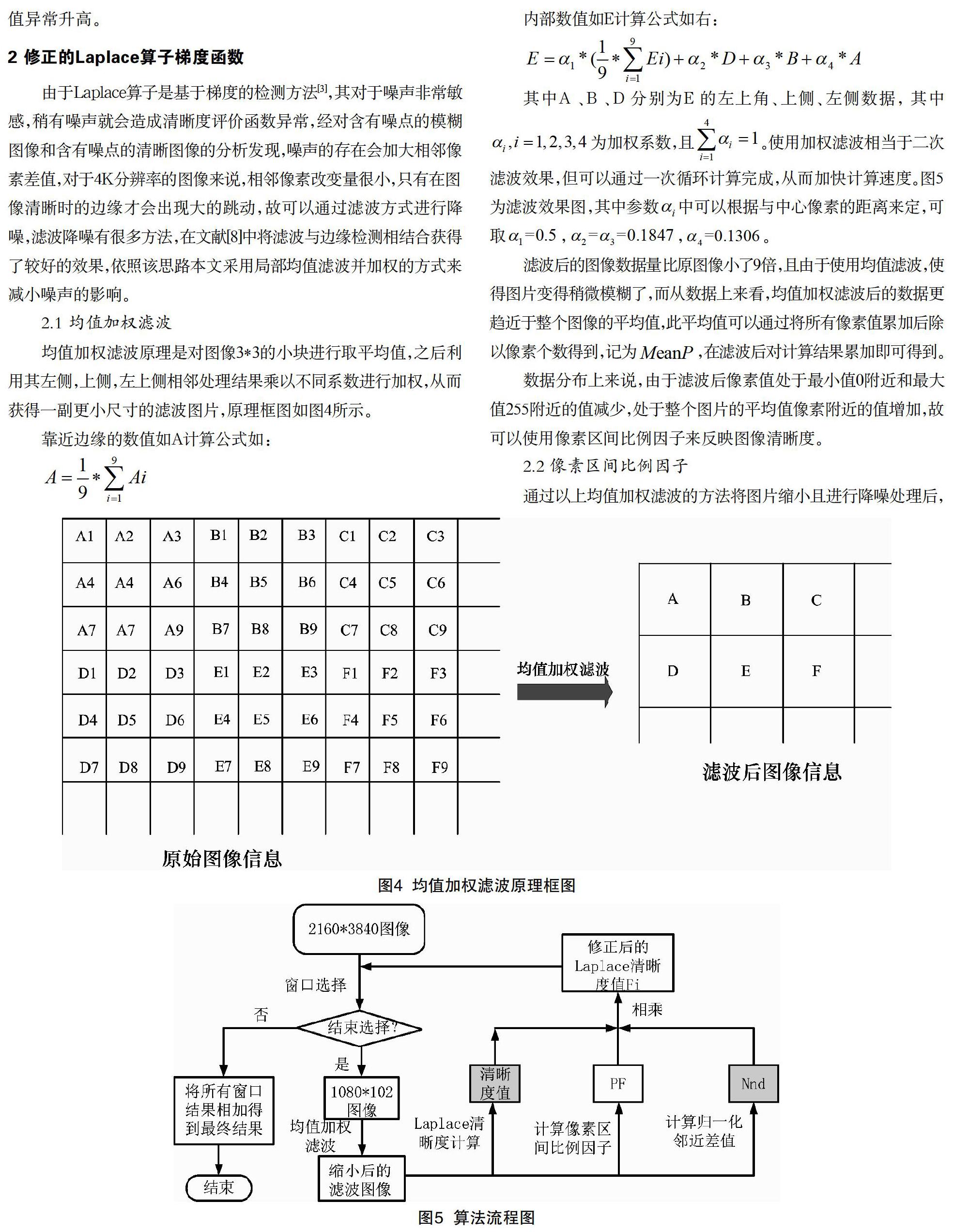
均值加權濾波原理是對圖像3*3的小塊進行取平均值,之后利用其左側,上側,左上側相鄰處理結果乘以不同系數進行加權,從而獲得一副更小尺寸的濾波圖片,原理框圖如圖4所示。
濾波后的圖像數據量比原圖像小了9倍,且由于使用均值濾波,使得圖片變得稍微模糊了,而從數據上來看,均值加權濾波后的數據更趨近于整個圖像的平均值,此平均值可以通過將所有像素值累加后除以像素個數得到,記為,在濾波后對計算結果累加即可得到。
數據分布上來說,由于濾波后像素值處于最小值0附近和最大值255附近的值減少,處于整個圖片的平均值像素附近的值增加,故可以使用像素區間比例因子來反映圖像清晰度。
2.2 像素區間比例因子
通過以上均值加權濾波的方法將圖片縮小且進行降噪處理后,像素值將會向平均值靠近,這時候對每個像素值進行區間統計,而區間統計時需要將的像素值劃分為多個區間段進行統計,本研究使用利用整個圖像的平均值將0-255劃分為5個區間段,如下所示:
區間一:,區間二: ,區間三:,區間四:,區間五:。其中,使用該方法進行像素區間分段,主要考慮在不同環境下,圖片的整體亮度不一樣,使用平均像素來進行自適應分區能減少由于畫面整體偏亮或者整體偏暗導致在某一區上統計值發生異常,若,則令。對不同區間統計結果分別記為,其中為第一個區間的統計值,為第五個區間的統計值。則像素區間比例因子的計算方法如下:
其中,為像素區間比例因子,為調節因子,由于圖片像素值集中于平均值,故的值最大,若圖像清晰則會減小,而其與值會增加,尤其是和會增加,通過計算不同區間的比例來反映圖片的清晰度,并利用調節因子對兩者比例值進行調節而獲得最終的像素區間比例因子。濾波后的圖像噪點對其影響非常小了,但如果直接使用Laplace算子進行檢測,依舊會在波峰出現波動為了使圖像具有更好的高靈敏性和全局單峰性,提出使用歸一化鄰近差值作為清晰度評價因素之一。
2.3 歸一化鄰近差值
由于圖像相鄰像素差值可以反映圖像的局部清晰度,如果圖片局部差值過大,一方面可能是由于圖像變清晰導致,另一方面也可能是由于噪點突然變多引起,考慮到噪點在正常使用中不會突然變化,故可以使用歸一化鄰近差值記為來反映圖片的清晰度。在實際場景中,圖像較為清晰的時候,其值較大,而在圖片模糊的時候其值較小,但在高度模糊時,由于亮度增加,其值會反常上升的異常狀態,故可以采用將歸一化鄰近差值與像素區間比例因子相乘得到一個清晰度評價因子,記為,利用此評價因子對Laplace算子檢測結果進行修正,即:
2.4 算法流程說明
基于以上算法的說明,本研究提出使用修正的Laplace算子梯度函數作為清晰度評價函數,為縮小數據量本研究采用斜條形窗口來增加窗口中所含的細節成分,整個算法流程圖,如圖5所示。
3 實驗與分析
在MatlabR2017a平臺上進行編程實現本文算法,實驗選取由自研4K高清網絡攝像機在白天六種場景下不含噪聲的圖像序列,通過在圖像中添加均值為0,方差不等的均勻分布的隨機噪聲來進行抗噪效果分析。限于篇幅,以下給出了效果最差的場景下歸一化評價函數比較圖。
其中加入的噪聲方差分別為0、0.01、0.05、0.1、0.5,使用等像素個數的中央區域窗口選擇方法,且使用均值濾波后分別使用Laplace算法和快速DCT變換算法與本文算法進行比較,如圖6所示。
在場景一下(37張圖像),效果最差,本文算法在噪聲方差小于0.1時,歸一化評價函數具有較好的單峰性且由較高的靈敏性,而對比算法在噪聲大于0.05時已經不具有良好的單峰性。但是本算法當噪聲高于0.1時,也會出現性能不好,這是由于圖片噪聲較多,已經導致圖像細節成分嚴重丟失,對于夜晚或者紅外模式下的圖片噪聲效果比較接近噪聲方差介于0.05志0.1的均勻高斯噪聲,能夠滿足實際場景需要。當噪聲超過0.1后已經嚴重影響到圖片的局部細節成分,故必須使用去噪算法才能獲得較好的清晰度評價效果,但由于由于目前去噪算法處理圖片尺寸較小,不能滿足窗口要求,故而采用本文所提出的均值加權濾波進行降噪處理。
由不同處理算法運行時間可知,本算法平均每張運行時間小于0.08秒,而使用均值濾波的Laplace算法平均每張運行時間約為0.15秒,而使用均值濾波的快速DCT算法平均每張運行時間約為0.32秒,在速度上本文所提算法較快。
4 結語
本文首先提出一種使用傾斜的條形區域作為檢測窗口的條形窗口選擇方法,該方法使用三個傾斜條形窗口作為聚焦窗口使用,能在縮少數據的同時保留更多的細節成分。為進一步縮小處理數據,本文提出均值加權縮小濾波方法,該方法通過對圖片進行一次循環、兩次計算進行濾波,在達到二次濾波效果的同時縮小圖像尺寸,之后對濾波圖片進行計算歸一化鄰近差值、像素區間比例因子和Laplace清晰度評價值,利用歸一化鄰近差值和像素區間比例因子構建清晰度評價因子實現對Laplace清晰度評價值得修正,從而實現較好的抗噪性能。但依舊在某些場景下效果不是很好,可以考慮使用較好的去噪算法對圖像進行恢復后再計算其Laplace算子清晰度,但要求其去噪運行時間要足夠的短,否則將會造成整個清晰度計算時間變長,這將是本研究未來的一個研究方向。
參考文獻
[1] Feng ?Quan,Han Ke,Zhu Xiuchang.A New Auto-focusing Method Based on the Center Blocking DCT[M]. Fourth International Conference on Image and Graphics(ICIG 2007),Sichuan,2007.
[2] 田文利.基于圖像清晰度評價函數與自動取窗對焦的目標視覺調焦算法[J].微型電腦應用,2017,33(9):75-79.
[3] Liu Shuxin,Liu Manhua,Yang Zhongyuan.An image auto-focusing algorithm for industrial image measurement[J].EURASIP Journal on Advances in Signal Processing,2016(1):70.
[4] 孫紅利,馮旗,董峰.圖像清晰度評價算法研究[J].傳感器與微系統,2017,36(2):67-70.
[5] 項魁,高健.自動對焦過程中圖像清晰度評價算法研究[J].組合機床與自動化加工技術,2019(1):52-55.
[6] 薛萬勛,卞春江,陳紅珍.基于點銳度和平方梯度的圖像清晰度評價方法[J].電子設計工程,2017,25(8):163-167.
[7] 易三莉,郭貝貝,馬磊.改進的模糊推理規則圖像邊緣檢測算法[J].計算機工程與應用,2016,52(12):180-183.
[8] 李忠海,金海洋,邢曉紅.整數階濾波的分數階Sobel算子的邊緣檢測算法[J].計算機工程與應用,2018,54(4):179-184.
