基于可拓優度評價的智能汽車橫向軌跡跟蹤控制方法*
2019-11-02 02:52:02蔡英鳳秦順琪孫曉強
汽車工程 2019年10期
蔡英鳳,秦順琪,臧 勇,孫曉強,陳 龍
(1.江蘇大學汽車工程研究院,鎮江 212013; 2.江蘇大學汽車與交通工程學院,鎮江 212013)
前言
汽車智能化技術作為解決交通安全、交通擁擠和環境污染問題的重要手段,正引發世界各國的新一輪角逐,受到各國學者的廣泛關注。自動駕駛作為智能汽車發展的高級階段,其核心之一是控制系統,汽車所有的動作都由該系統進行控制,性能良好的控制系統對整個自動駕駛汽車平臺的運行具有重要的作用。車輛橫向控制是指車輛在沿著期望路徑行駛過程中,通過算法決策和底層執行裝置的作用,使橫向位置偏差和航向偏差盡可能小,同時車輛應具有一定的穩定性和行駛安全性[1]。
普通車輛為前輪驅動,自動駕駛汽車橫向軌跡跟蹤控制通過調節前輪轉角保證車輛橫向控制精度和車輛行駛的安全性穩定性。橫向控制主要有預瞄式參考系統和非預瞄式參考系統兩種。預瞄式參考系統主要以車輛前方位置的道路曲率作為輸入,以車輛與期望路徑之間的橫向位置偏差或航向偏差為控制目標,通過各種反饋控制方法設計對車輛動力學參數魯棒的反饋控制系統,如基于雷達或攝像頭等視覺傳感器的參考系統。非預瞄式參考系統根據車輛附近的期望路徑,通過車輛運動學模型計算出如車輛橫擺角速度等描述車輛運動的物理量,然后設計反饋控制系統進行跟蹤。如今常用的橫向控制方法有經典控制方法[2]、最優控制方法[3]、自適應控制方法[4]、滑模控制方法[5]、魯棒控制方法[6]、模型預測控制方法[7]和模糊控制方法[8]。經典控制方法采用PID控制方法,通過橫擺角速度反饋將橫擺運動和橫向運動解耦,使用動態前視和橫擺角速度反饋兩種方法,實現智能汽車橫向控制[9]。最優預瞄橫向控制算法同時考慮車輛當前偏差、預瞄點偏差和控制變量的有限時間二次型性能指標函數,運用最優跟蹤算法設計了最優預瞄控制器,實現車道保持控制[10]。自適應控制方法根據輸出約束條件,自適應地控制車道保持過程中橫向偏差,保證車輛運動的穩定性[11]。文獻[12]中提出了一種基于軌跡跟蹤誤差的魯棒控制方法,將前饋控制和魯棒控制策略相結合,設計了線性模型預測控制器,使直線和曲線工況的跟蹤誤差均滿足要求。文獻[13]中基于7自由度非線性車輛動力學模型,設計滑模控制器跟蹤期望橫擺角速度,使車輛穩定地跟蹤目標路徑。文獻[14]中采用2自由度自行車模型和魔術公式輪胎模型,對自主車輛的自動轉向控制提出了一種非線性模型預測控制(NMPC)方法。自動調節的模糊控制器采用帶約束的迭代遺傳算法來控制無人駕駛車輛的轉向,通過迭代調整模糊控制器的隸屬函數和規則庫,達到控制要求[15]。然而,上述的控制方法約束條件較多,有效控制區域小,在某些工況下控制效果不佳,尤其對于道路曲率變化范圍大的混合工況,會出現求解失敗、控制誤差大的問題。除經典控制方法外,大多數控制器計算量大、迭代速度慢,對于硬件要求高,實車移植性差,不同工況下控制器切換不協調。
本文中主要針對單一控制策略控制范圍有限的問題,基于蔡文提出的可拓理論,提出了可拓優度評價控制方法。可拓優度評價方法是可拓學中評價一個對象,包括事物、策略和方法等優劣的基本方法,根據實際問題的需要,制定符合技術要求的評價標準,確定出衡量指標,反映出利弊的過程及其變化情況,從而評價一個對象的優劣[16]。將上層控制器的輸出量分別輸入到車輛動力學模型,得到車輛狀態預估量,以此作為車輛橫向控制的評價指標,從而計算出各評價對象的優度值。根據實時的車輛狀態和優度評價控制方法有針對性地采用優度更高的輸出值,提出一種基于可拓優度評價的智能汽車橫向軌跡跟蹤控制方法,可使整個控制過程取得良好控制效果,將誤差控制在較小的范圍內。因此,可將可拓優度評價方法運用到智能汽車橫向軌跡跟蹤控制系統,保證車輛運動過程中的精確跟蹤。
1 車輛動力學模型和路徑跟蹤預瞄模型的建立
1.1 車輛2自由度動力學模型
采用2自由度車輛動力學模型,該模型只考慮沿車輛y軸的側向運動和繞z軸的橫擺運動,并做如下假設:
(1)忽略汽車的空氣阻力;
(2)假設汽車在水平路面行駛,且忽略車輛的滾動阻力;
(3)假設汽車兩前輪和兩后輪的轉向角大小分別相等且車輪的外傾角為0;
(4)忽略轉向系在車輛轉向過程中的作用,直接以前輪的車輪轉角作為系統的控制輸入;
(5)假設汽車的懸架是剛性的,車身不存在垂直于地面的上下運動、前后俯仰和車身的側傾,車身的運動平行于地面;
(6)忽略轉彎過程中汽車質量的左右偏移,假設左右兩側車輪所受地面的垂向反力相等[17]。
車輛2自由度動力學模型示意圖如圖1所示。根據牛頓第二定律定理可得沿y軸的力平衡方程和繞z軸的力矩平衡方程[17]:

式中:m為車輛質量,kg;vx,vy分別為車輛縱向速度、橫向速度,m·s-1;δf為車輛前輪轉角,rad;Iz為車輛繞z軸的轉動慣量,kg·m2;a,b分別為車輛質心至前軸和后軸的水平距離,m;k1,k2分別為前、后輪輪胎的側偏剛度,N·rad-1;φ·為車輛橫擺角速度,rad·s-1。
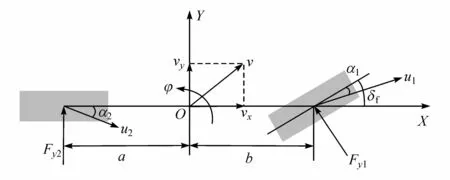
圖1 車輛2自由度動力學模型示意圖
1.2 路徑跟蹤預瞄模型
車輛在軌跡跟蹤過程中,運動過程包括車輛的平移運動和旋轉運動,路徑跟蹤預瞄偏差模型如圖2所示[18]。
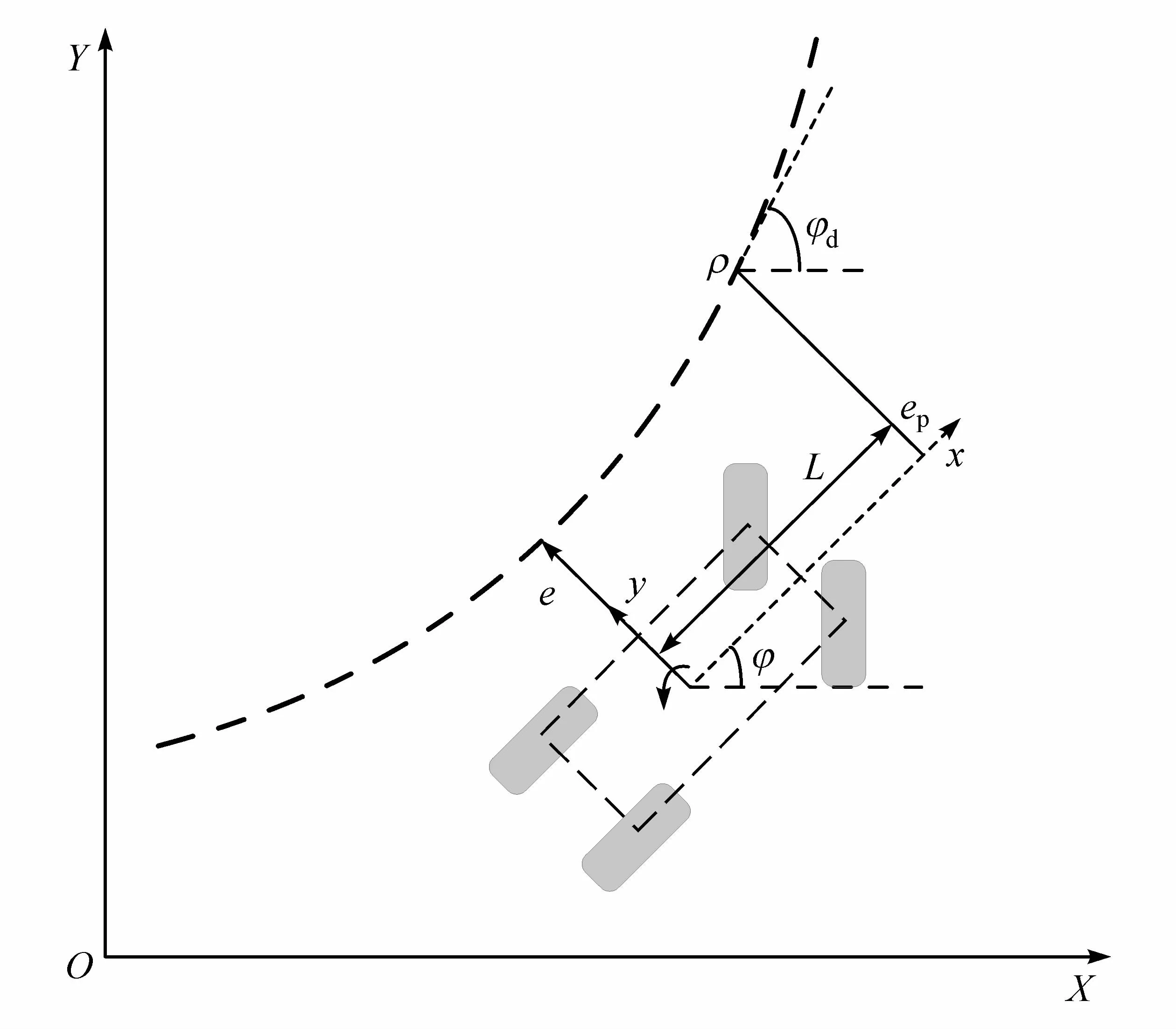
圖2 路徑跟蹤預瞄偏差模型圖
圖2 中:L為預瞄距離,m;ep為預瞄點的橫向位置偏差,m;e為車輛質心處橫向位置偏差,m;φ為車輛航向角,rad;φd為道路中心線切線與大地橫坐標的夾角,rad。
定義φr為車輛與道路中心線的航向偏差:

根據幾何關系可得

因 tanφr≈φr,故

對ep求導可得

根據幾何關系可得

其中,車輛縱向速度vx為常數,道路中心線曲率ρ為道路中心線圓半徑的倒數,為已知量。
因此有

車輛軌跡跟蹤過程質心處與道路中心線之間的橫向位置偏差的變化率為

因 cosφr≈1,sinφr≈φr,故

將式(9)代入式(5)可得

化簡可得車輛狀態量側向速度vy、側向加速度v·y、車輛橫擺角速度φ·和車輛橫擺角加速度φ··與路徑跟蹤預瞄偏差模型中參數的關系,即路徑跟蹤預瞄偏差模型:

將路徑跟蹤預瞄偏差模型與車輛2自由度動力學模型結合,構成車輛-道路預瞄偏差模型,選取ep,為狀態空間方程的狀態量,可得車輛-道路模型的狀態空間方程·x=Ax+Bu[19]:

其中:

2 系統設計
本文中所提出的基于可拓優度評價的智能汽車橫向軌跡跟蹤控制方法的控制流程圖如圖3所示,由上層控制器和下層控制器兩部分構成。
2.1 上層控制器
上層控制器中車輛-道路狀態量實際采用的攝像頭為AVT ALLIED PIKE F-421B/C,攝像頭通過CAN總線連接到自動駕駛試驗車處理器,通過攝像頭采集處理的數據可用于MATLAB/Simulink仿真。由于攝像頭遠距離對道路信息采集時存在偏差大和置信度低的問題,為了保證攝像頭采集信息對控制系統可信度的要求,對該型號攝像頭設置參數極限值,如表1所示。

圖3 基于可拓優度評價方法的橫向軌跡跟蹤控制流程圖
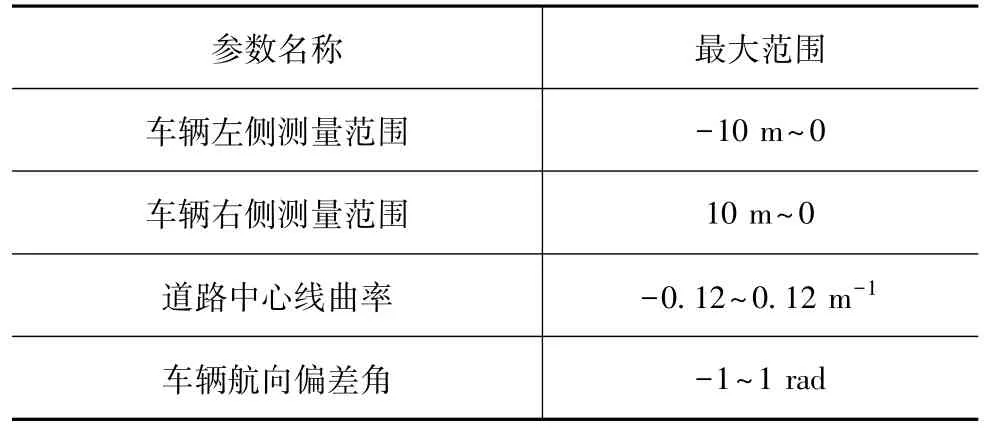
表1 攝像頭有效測量極限參數值
上層控制器包括基于預瞄偏差的PID反饋控制和基于道路曲率的PID前饋-反饋控制。PID反饋控制適用于曲率較小的道路,只需要小幅控制,即能實現橫向軌跡跟蹤。預瞄偏差包含預瞄點處的橫向位置偏差ep和車輛航向與道路期望航向之間的航向偏差φr。在設計PID反饋控制器時,須同時調節這兩個偏差,以獲得最優的前輪轉角輸入,使車輛橫向控制過程中不僅有較小的橫向位置偏差,還能保證車輛與期望軌跡之間有較小的航向偏差[20],可通過加權相加的方式來實現兩者偏差調節量的疊加。
PID前饋-反饋控制適用于車輛轉彎半徑較小、道路曲率較大的工況,要求車輛快速響應,故采用基于前方道路曲率的前饋控制加以抑制,保證車輛能及時將車輪轉到所需的轉角上,使車輛前輪轉角快速響應,提高了控制系統對于小曲率路徑干擾的響應速度,同時也減小了車輛轉向控制的滯后和波動[21]。
2.2 下層控制器
下層控制器利用可拓優度評價控制器來評價上層兩控制器的優劣,從而選擇優度高的控制器輸出值。
可拓優度評價控制器基于可拓學優度評價方法來選取優度較高的控制器輸出值,優度評價方法流程圖如圖4所示,具體過程如下[16]。

圖4 優度評價方法流程圖
(1)確定衡量指標
要評價一個對象的優劣,首先須規定衡量指標。優劣是相對于一定的標準而言。一個對象,對某些衡量指標是有利的,而對另一些衡量指標可能是有弊的,因此評價一個對象的優劣必須反映出利弊的程度及其可能的變化情況。將PID反饋控制和PID前饋-反饋控制的輸出量分別輸入到基于車輛動力學模型的車輛狀態預估模型中,得到對應車輛狀態預估量:車輛質心處橫向位置偏差e1,e2,車輛航向偏差 φr1,φr2和車輛橫擺角速度·φ1,·φ2。以此作為衡量指標:

(2)確定權系數
評價兩個控制器輸出值 δfj(j=1,2)優劣的 MI={e,φr,φ·}各衡量指標 MIi有輕重之分,以權系數來表示各衡量指標的重要性程度,分別賦予(0,1)的值。權系數記為

其中 α1+α2+α3=1
依據重要程度取:車輛質心的橫向位置偏差權重 α1=0.5,車輛航向偏差權重 α2=0.3,車輛橫擺角速度權重 α3=0.2。
(3)建立關聯函數[22]
以車輛質心的橫向位置偏差e為例,建立關聯函數。選擇特征量最優狀態點均為原點S0(0,0)。質心的橫向位置偏差S(e,e·)與最優點S0(0,0)的加權可拓距為

橫向位置偏差經典域界可拓距為

橫向位置偏差可拓域界可拓距為

根據實時狀態下質心的橫向位置偏差可拓集合點S(e,e·)與最優點S0(0,0)的可拓距|SS0|和經典域界與可拓域界可拓距可計算兩者關聯函數,即

(4)計算關聯度
衡量指標 MI={e,φr,φ·},權系數分配為 α=(α1,α2,α3),根據各衡量指標要求,把對象 δf1和 δf2關于各衡量指標MIi的關聯函數值簡記為Ki(Sj),則各對象 δf1,δf2關于 MIi的關聯度為

將上述關聯度進行規范化:

則各對象δf1和δf2關于MIi的規范關聯度為

(5)計算優度
對象Zj關于各衡量指標MI1,MI2和MI3的規范關聯度為

對象Zj的優度為


(6)選取優度較高方案
對δfj的優度進行比較,若

則對象δf0為較優,δf0便是控制器實際輸出值。
優度評價方法如表2所示。

表2 優度評價方法
3 仿真結果
本文中基于MATLAB/Simulink-Carsim平臺,搭建仿真系統模型,基于可拓優度評價橫向軌跡跟蹤控制仿真系統框架圖如圖5所示,仿真實驗驗證本文中提出的基于可拓優度評價橫向軌跡跟蹤控制方法的有效性和穩定性,工況為兩次變道路徑。仿真采用的整車參數如表3所示。
本文中選用的工況為兩次變道工況,車輛速度為中高速狀態vx=20 m/s,預瞄距離為15 m,為保證變道平順性,期望軌跡曲率變化如圖6所示,曲率ρ隨時間變化結果,最大曲率為0.000 25 m-1,變道最大橫向位移為4 m。該工況有效驗證了本文中提出的可拓優度評價橫向切換控制器在中高速工況下時變曲率道路跟蹤控制穩定性和可靠性。
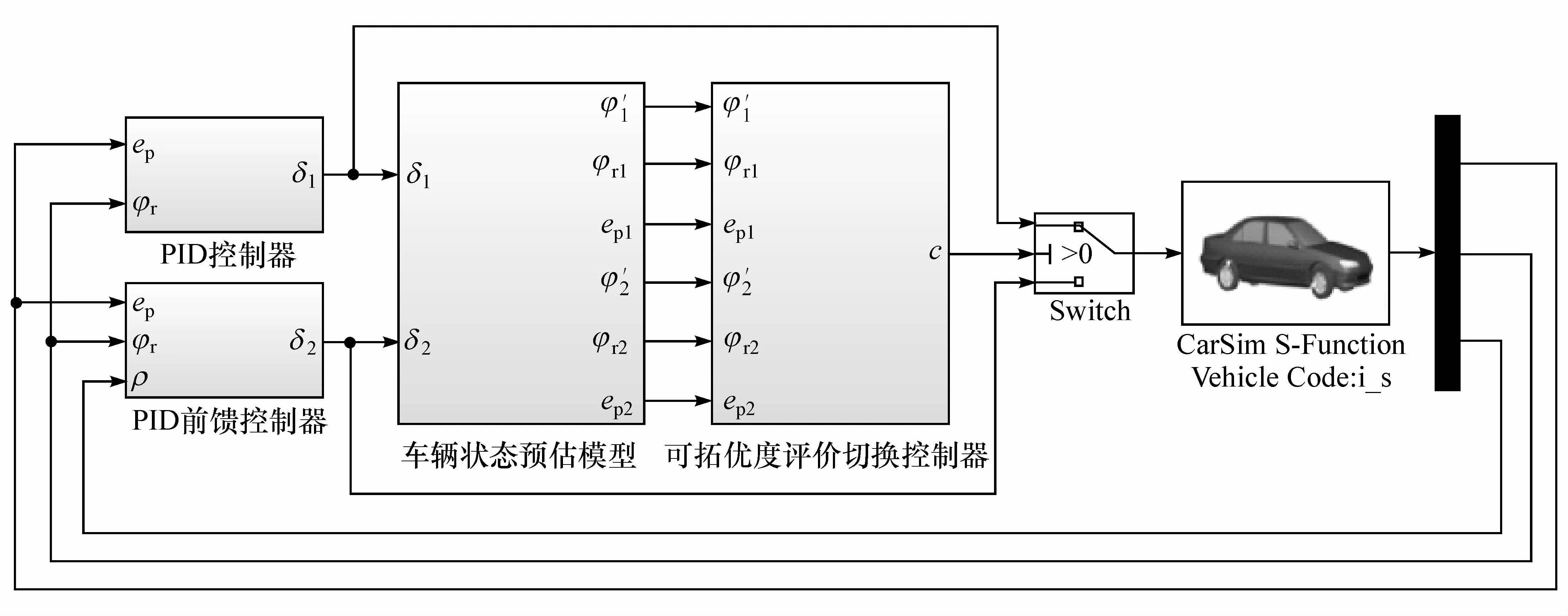
圖5 基于可拓優度評價橫向軌跡跟蹤控制仿真系統框架圖

表3 整車參數
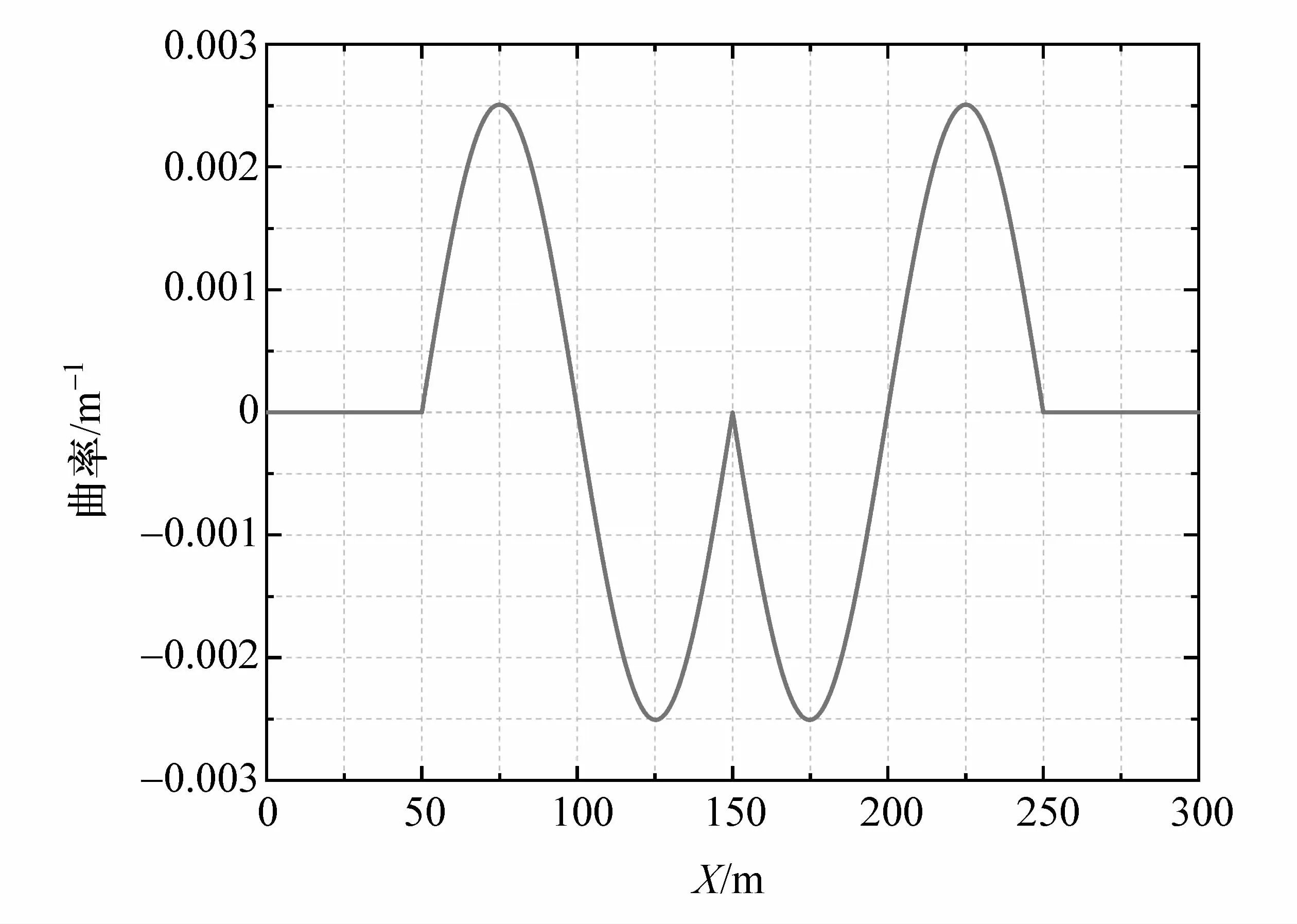
圖6 目標軌跡曲率
軌跡跟蹤結果如圖7所示。可以看出,本文中提出的橫向軌跡跟蹤控制系統在此中高速工況下跟蹤精度較好。車輛質心橫向位置偏差如圖8所示,橫向位置偏差峰值由0.15下降到0.125 m,改善16.67%,車輛完成變道后,能快速收斂達到穩定狀態。車輛航向偏差如圖9所示,航向偏差峰值由0.007 5下降到0.006 6 rad,改善12%,車輛完成變道后,能快速收斂達到穩定狀態。可拓優度評價控制器響應結果如圖10所示,車輛直行時,控制器輸出值均為大于0的穩態值,此時車輛-道路系統穩定,當車輛開始變道時,可拓優度評價函數向負值方向發展,路徑跟蹤逐漸向不穩定發展,此次車輛-道路系統控制難度增大,在車輛完成變道后,車輛-道路系統逐漸進入穩定狀態,可拓優度評價函數的變化過程體現了整個控制過程中兩控制器實時輸出值的優劣程度。此外,車輛運動過程中橫擺角速度和側向速度如圖11和圖12所示,橫擺角速度與側向速度無明顯波動,沒有出現車輛控制過程中不穩定狀態,整個控制過程車輛穩定性良好,兩種控制器沒有明顯差別。

圖7 車輛軌跡跟蹤曲線

圖8 車輛質心處橫向位置偏差
根據兩次變道工況在中高速工況下響應結果發現,本文中提出的可拓優度評價控制系統在中高速時變曲率道路具有較高的跟蹤精度,控制系統可靠性強。

圖9 車輛航向偏差
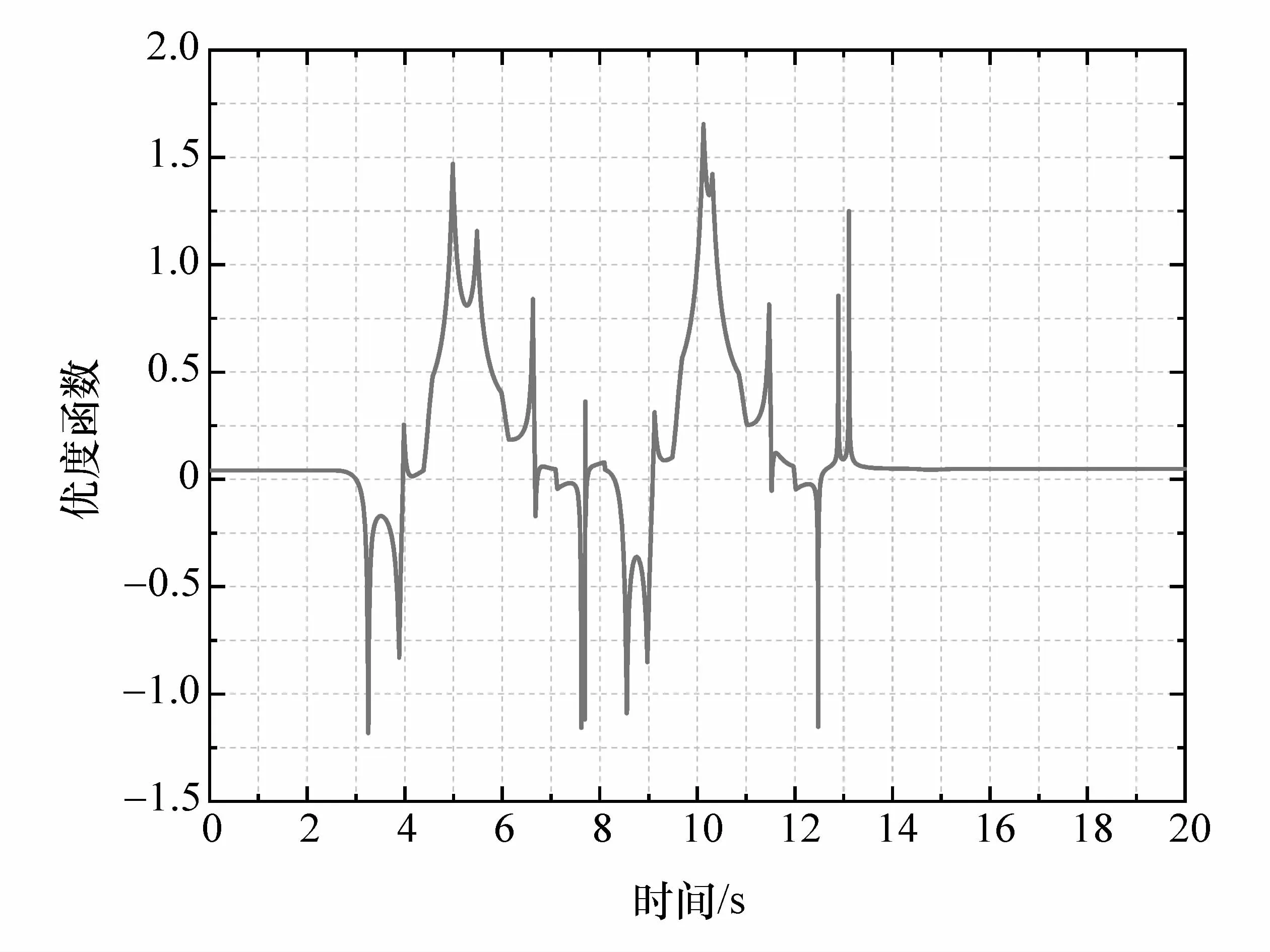
圖10 優度評價函數之差
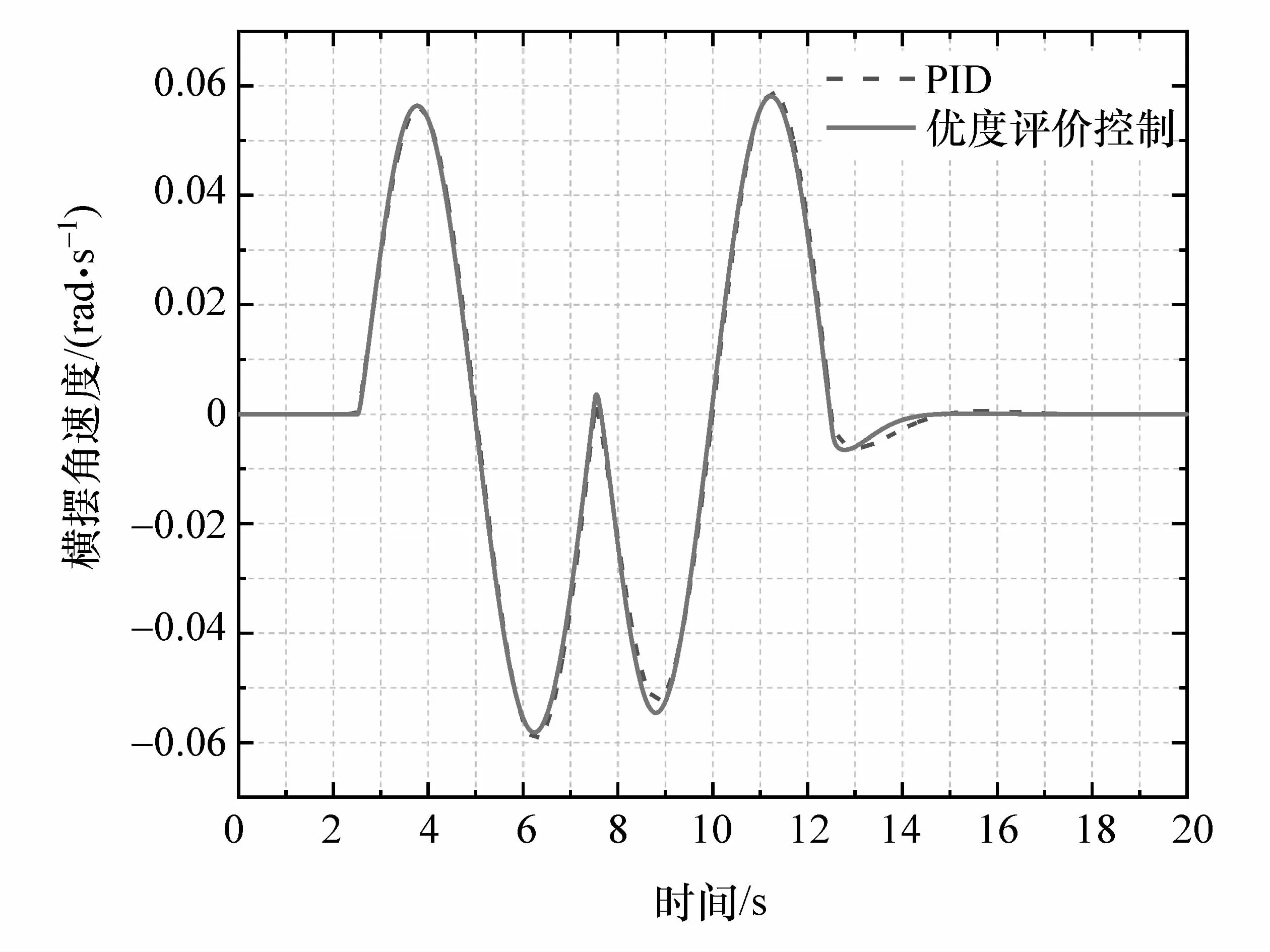
圖11 車輛橫擺角速度
4 結論
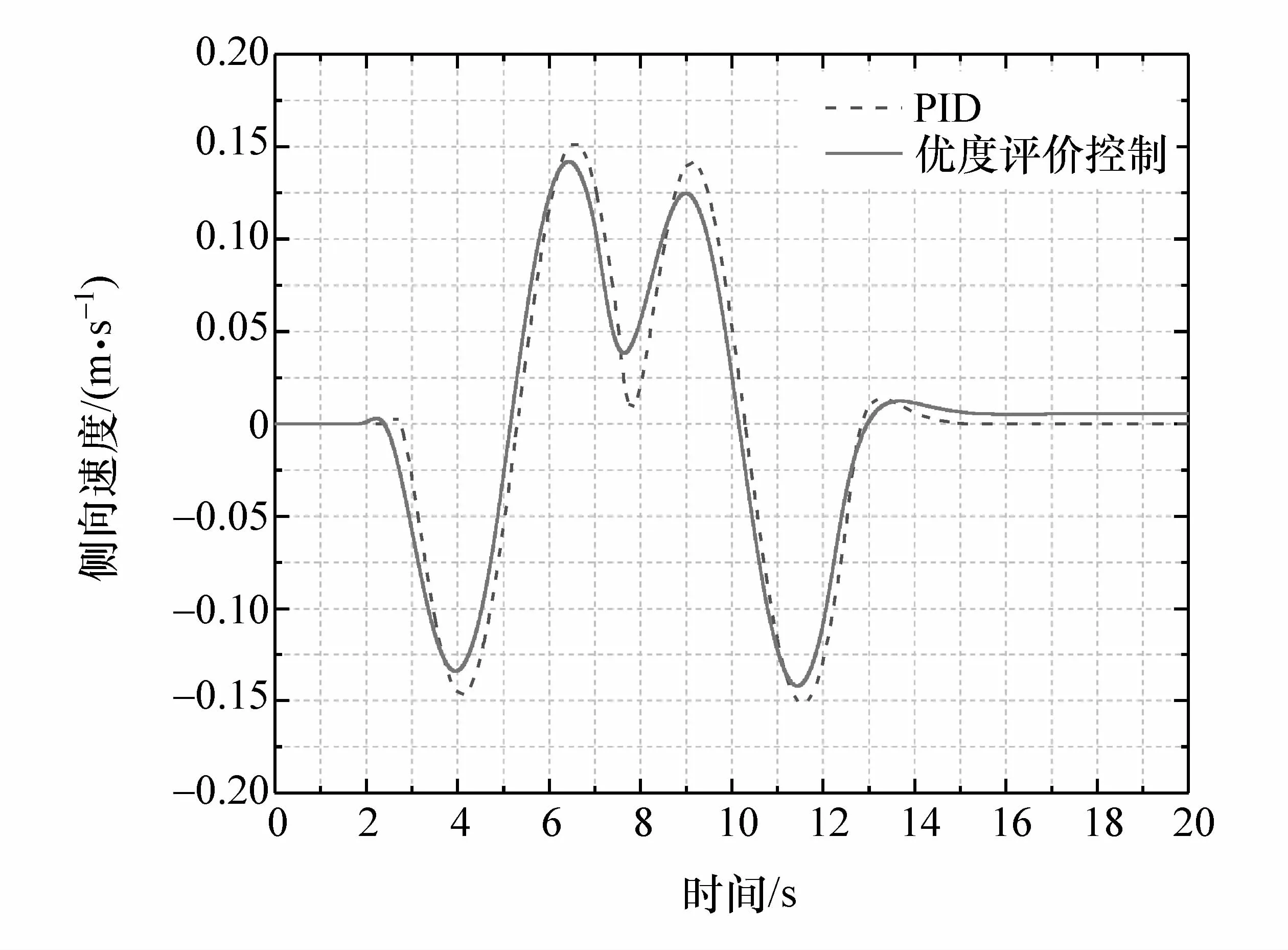
圖12 車輛側向速度
本文中提出了一種基于可拓優度評價的智能汽車橫向軌跡跟蹤控制方法,該方法解決了中高速、時變大曲率工況下橫向控制精度低、穩定性可靠性差的問題,實現了智能汽車的橫向軌跡跟蹤控制。基于質心橫向位置偏差、航向偏差和橫擺角速度特征量建立可拓優度評價控制器,以控制器效果的優劣采用對應控制輸出,實現了控制輸出與車輛-道路系統穩定性的實時對應,從而保證了控制系統在較高精度范圍內工作。從兩次變道時變曲率工況下Simulink/Carsim響應結果可以驗證,智能汽車橫向軌跡跟蹤控制過程中,軌跡跟蹤精度高,車輛運動穩定性、平順性好。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
石油瀝青(2021年4期)2021-10-14 08:50:44
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
俄羅斯問題研究(2012年1期)2012-03-25 09:54:51
