基于波束形成與波疊加的噪聲源三維定位方法研究
2019-11-02 02:52:06卓瑞巖何元章許國(guó)松
汽車工程 2019年10期
卓瑞巖,劉 成,何元章,許國(guó)松,劉 爽,張 立
(東風(fēng)汽車集團(tuán)有限公司技術(shù)中心,武漢 430063)
前言
噪聲源的準(zhǔn)確定位是噪聲控制的關(guān)鍵[1]。基于波束形成技術(shù)的噪聲源定位技術(shù)可以通過非接觸、中遠(yuǎn)距離傳聲器陣列測(cè)量,得到噪聲源在聲成像平面上的二維坐標(biāo)[2]。因此,波束形成技術(shù)在噪聲源定位領(lǐng)域取得了廣泛應(yīng)用[3-5]。但波束形成無法識(shí)別噪聲源三維坐標(biāo),且固有的旁瓣效應(yīng)會(huì)引入虛假聲源干擾。波疊加法最初應(yīng)用于結(jié)構(gòu)聲輻射的計(jì)算[6],隨著波疊加理論的不斷改進(jìn)和完善[7-11],其應(yīng)用范圍也得到擴(kuò)展,結(jié)合波束形成和聲全息等技術(shù),波疊加法已在噪聲源定位領(lǐng)域得到應(yīng)用[12]。
因此,本文基于波束形成聲源定位技術(shù)和聲壓匹配波疊加法基本思想,提出了波束形成與波疊加相結(jié)合的聲源三維定位方法。該方法用波疊加等效源模擬實(shí)際聲源,以重建傳聲器陣列聲壓誤差作為評(píng)價(jià)指標(biāo),采用遺傳算法搜索求解等效源三維坐標(biāo)和源強(qiáng),實(shí)現(xiàn)噪聲源的準(zhǔn)確三維定位,并根據(jù)求解所得等效源相對(duì)強(qiáng)度,重建聲成像平面上聲壓分布,有效抑制了波束形成旁瓣效應(yīng)造成的虛假聲源干擾,使識(shí)別結(jié)果更加清晰。
1 噪聲源信息預(yù)估
進(jìn)行噪聲源三維定位之前,須先基于波束形成技術(shù)進(jìn)行噪聲源數(shù)量和二維坐標(biāo)等信息的預(yù)估。波束形成噪聲源定位應(yīng)用中,須預(yù)設(shè)聲成像平面,平面上均勻分布的若干掃描點(diǎn)作為定位結(jié)果輸出點(diǎn)。波束形成在成像平面上聲源實(shí)際位置處輸出較大,而其他位置輸出幅值較小,通過各點(diǎn)輸出幅值的對(duì)比達(dá)到聲源定位的目的。
以空間坐標(biāo)系原點(diǎn)為基準(zhǔn)點(diǎn),由于傳聲器陣列各陣元到聲源距離不同,根據(jù)圖1所示波束形成示意圖推導(dǎo)出第m號(hào)陣元相對(duì)于基準(zhǔn)點(diǎn)接收同一位置處聲源發(fā)出信號(hào)的時(shí)間延遲或提前可表示為

式中:s為掃描點(diǎn)的位置向量;sm為第m號(hào)傳聲器陣元的位置向量;M為傳聲器數(shù)目;c0為聲速。

圖1 波束形成示意圖
基于τm(s)將所有通道信號(hào)時(shí)域波形經(jīng)過“相位對(duì)齊”后再進(jìn)行“加權(quán)求和”,得到該掃描點(diǎn)處時(shí)域波束形成輸出:

式中:pm(t)為第m號(hào)傳聲器時(shí)域聲壓;wm為m號(hào)傳聲器信號(hào)加權(quán)系數(shù),取wm=1。通常需要單獨(dú)對(duì)各個(gè)頻段聲源進(jìn)行定位,因此對(duì)式(2)進(jìn)行FFT變換后可得頻域波束形成輸出:

式中ω為聲波角頻率,ω=2πf,f為頻率。
波束形成輸出結(jié)果中,每一峰值均代表該處可能存在聲源,峰值XY坐標(biāo)即為聲源的XY坐標(biāo)。因此,可基于波束形成實(shí)現(xiàn)聲源個(gè)數(shù)和二維坐標(biāo)的預(yù)估,將輸出峰值二維坐標(biāo)作為搜索求解聲源三維坐標(biāo)的初始值,如圖2所示。

圖2 波束形成聲源定位示例
2 噪聲源三維定位
為識(shí)別噪聲源三維坐標(biāo)并消除波束形成旁瓣效應(yīng)干擾,提出波疊加法與波束形成相結(jié)合的噪聲源三維定位方法(圖3),該方法主要分為3步:
(1)基于波束形成技術(shù)對(duì)噪聲源數(shù)量及二維坐標(biāo)進(jìn)行預(yù)估,預(yù)估結(jié)果中每一個(gè)峰值均表示該處可能存在聲源;
(2)提取主要峰值所對(duì)應(yīng)的二維坐標(biāo),并在該處布置波疊加等效源,以等效源模擬實(shí)際聲源,該布置位置則作為搜索聲源三維坐標(biāo)的初始值;
(3)以遺傳算法為搜索求解工具,以重建傳聲器聲壓誤差作為評(píng)價(jià)指標(biāo),搜索求解聲源三維坐標(biāo)及對(duì)應(yīng)源強(qiáng)。

圖3 噪聲源三維定位方法流程
根據(jù)波疊加法基本思想,聲場(chǎng)中任意一點(diǎn)的聲壓均可由各聲源(等效源)強(qiáng)度與格林函數(shù)計(jì)算得到

式中:p(r)為場(chǎng)點(diǎn)r處聲壓;M為等效源總數(shù);ρ為空氣介質(zhì)平均密度;ω為振動(dòng)圓頻率;rm為其中一個(gè)等效源坐標(biāo);q(rm)為 rm處等效源強(qiáng)度;G(R)為自由場(chǎng)格林函數(shù),即

式中:R為 rm與 r的距離,R=|rm-r|;k為波數(shù),k=ω/c。再將式(4)寫成矩陣的形式,即

式中:P為場(chǎng)點(diǎn)聲壓向量;Q為等效源強(qiáng)度向量;T為P與Q傳遞函數(shù)矩陣,即

式中:GNM(R)為第N個(gè)場(chǎng)點(diǎn)與第M個(gè)等效源間格林函數(shù);R為第N個(gè)場(chǎng)點(diǎn)與第M個(gè)等效源間空間距離。
當(dāng)?shù)刃г春蛨?chǎng)點(diǎn)位置確定后,T可通過格林函數(shù)計(jì)算得到;之后測(cè)量得到場(chǎng)點(diǎn)聲壓P1,代入式(6)反算出等效源源強(qiáng)Q。為保證方程有唯一解,需令N≥M。根據(jù)計(jì)算所得等效源強(qiáng)度,可再由式(7)計(jì)算得到其他場(chǎng)點(diǎn)處聲壓值P′(R)為

由于在搜索等效源位置過程中,R為變量,因此P′,T′和Q′均為 R的因變量,只有當(dāng)搜索過程中R與真實(shí)聲源位置相同時(shí),P′(R)和 Q′(R)才會(huì)與實(shí)際值相等;而當(dāng)R偏離真實(shí)聲源位置時(shí),P′(R)和Q′(R)也會(huì)偏離實(shí)際值。
因此,設(shè)定目標(biāo)函數(shù)為

P1與P2通過陣列聲壓測(cè)量獲取,場(chǎng)點(diǎn)聲壓P1用于搜索過程中計(jì)算等效源強(qiáng)度,場(chǎng)點(diǎn)聲壓P2用于搜索過程中判斷等效源位置和強(qiáng)度是否準(zhǔn)確,P1與P2場(chǎng)點(diǎn)位置不能重合,否則搜索無法進(jìn)行。E(R)值的大小可作為評(píng)價(jià)搜索過程中等效源位置R與真實(shí)聲源偏差大小的指標(biāo),E(R)越小,等效源距離真實(shí)聲源越近。
3 搜索模型
根據(jù)本文提出算法的基本思路,圖4示出搜索空間的定義方法。

圖4 聲源三維坐標(biāo)搜索模型
圖4 中“·”為波束形成定位結(jié)果,在該處布置波疊加等效源,虛線矩形框?yàn)楦鶕?jù)波束形成定位結(jié)果確定的遺傳算法搜索求解空間。在遺傳算法對(duì)等效源位置進(jìn)行搜索求解的過程中,各個(gè)等效源在圖4中虛線框所示搜索范圍內(nèi)隨機(jī)變化組合,直到各等效源位置均與實(shí)際聲源位置重合,此時(shí)E(R)達(dá)到最小值,等效源的空間位置R即為所求最優(yōu)解,搜索求解過程結(jié)束。
4 試驗(yàn)驗(yàn)證
以揚(yáng)聲器作為已知聲源,在半消音室中進(jìn)行上述噪聲源三維定位方法的有效性驗(yàn)證。
4.1 試驗(yàn)?zāi)P?/h3>
本試驗(yàn)所設(shè)計(jì)傳聲器陣列為4×4的16陣元等間距平面網(wǎng)格陣列,陣元間距0.1 m。設(shè)定波束形成聲成像平面為Z=1 m平面,傳聲器陣列位于Z=0平面,陣列中心為空間坐標(biāo)系原點(diǎn)O。在空間點(diǎn)(0,0,1.5 m)處布置揚(yáng)聲器作為聲源,播放聲音頻率為3 000 Hz。試驗(yàn)?zāi)P腿鐖D5所示,圖中示出了聲源、聲成像平面及傳聲器陣列面之間空間位置關(guān)系。試驗(yàn)現(xiàn)場(chǎng)如圖6所示。
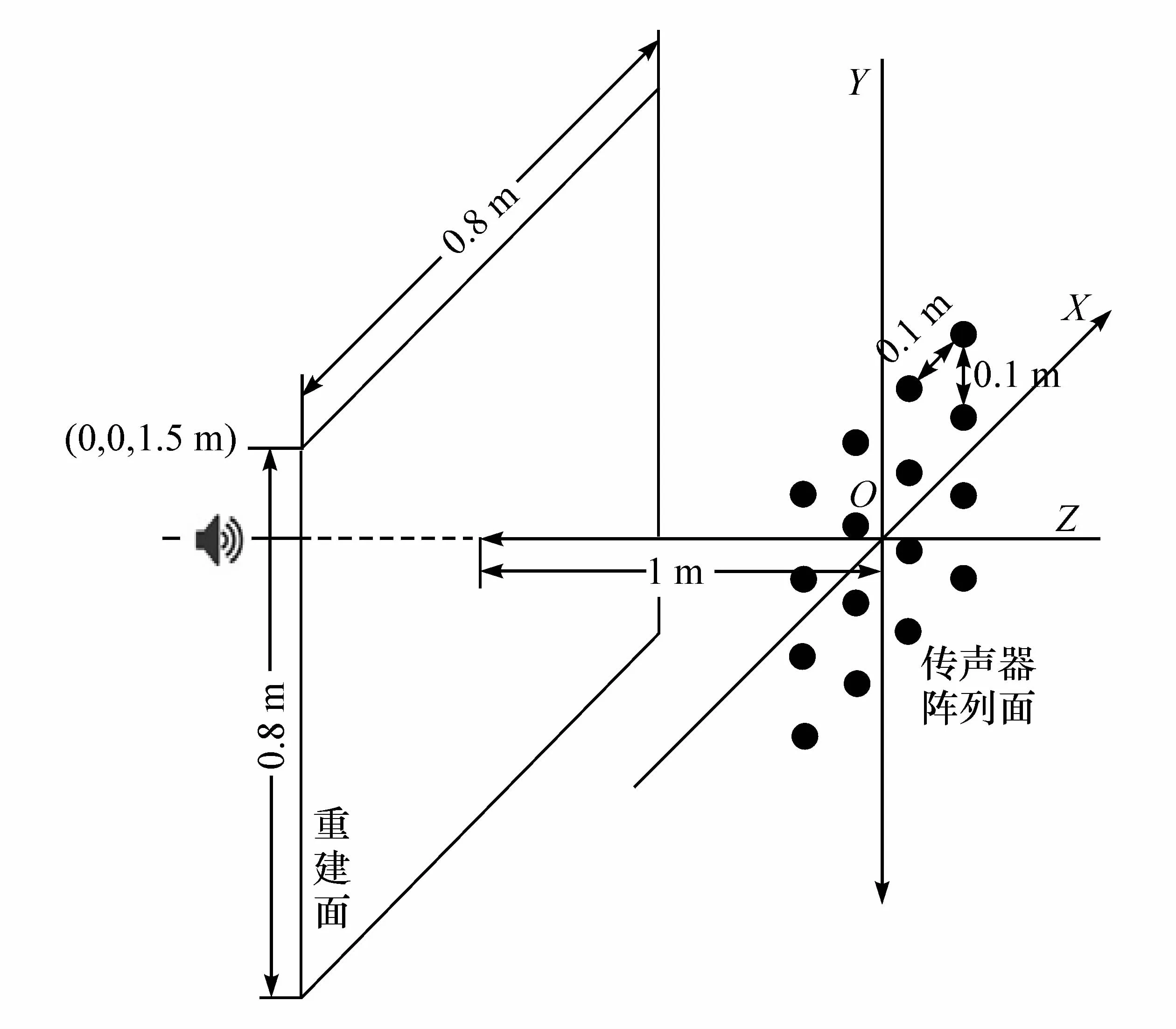
圖5 試驗(yàn)?zāi)P?/p>

圖6 試驗(yàn)現(xiàn)場(chǎng)
4.2 試驗(yàn)結(jié)果
基于4.1節(jié)所述試驗(yàn)?zāi)P停紫冗M(jìn)行噪聲源數(shù)量及二維坐標(biāo)信息預(yù)估,然后進(jìn)行噪聲源三維定位。
4.2.1 噪聲源預(yù)估結(jié)果
基于波束形成對(duì)噪聲源的XY二維坐標(biāo)進(jìn)行識(shí)別,噪聲源預(yù)估結(jié)果如圖7所示。

圖7 噪聲源預(yù)估結(jié)果
將波束形成識(shí)別結(jié)果中主瓣及旁瓣的XY坐標(biāo)和幅值信息進(jìn)一步提取如表1所示。

表1 噪聲源預(yù)估結(jié)果 m
由表1可知:主瓣(即旁瓣比100%處)對(duì)應(yīng)真實(shí)聲源,且主瓣XY坐標(biāo)為(-0.02 m,0),與實(shí)際聲源 XY坐標(biāo)(0,0)誤差僅為 0.02 m;但同時(shí)在(0.02 m,0.44 m)和(0.02 m,-0.40 m)處存在旁瓣比高達(dá)84.2%和81.9%的虛假聲源干擾。
4.2.2 噪聲源三維定位結(jié)果
基于波束形成準(zhǔn)確識(shí)別出真實(shí)聲源二維XY坐標(biāo)基礎(chǔ)之上,在主瓣及旁瓣處均布置波疊加等效源,運(yùn)用本文提出方法,進(jìn)行聲源三維坐標(biāo)識(shí)別和旁瓣干擾抑制,計(jì)算結(jié)果如表2所示。識(shí)別出真實(shí)聲源三維坐標(biāo)為(-0.02 m,0,1.54 m),與聲源真實(shí)的三維坐標(biāo)(0,0,1.5 m)相符。

表2 噪聲源三維定位結(jié)果 m
再由計(jì)算所得波疊加等效源強(qiáng)度,重建出二維重建面,其旁瓣效應(yīng)消除結(jié)果如圖8所示。由圖可見,二維定位結(jié)果更加清晰明辨,旁瓣比分別由84.2%和81.9%下降為32.2%和48.1%,旁瓣效應(yīng)造成的虛假聲源干擾被很好抑制。

圖8 旁瓣效應(yīng)消除結(jié)果
5 結(jié)論
(1)為對(duì)噪聲源進(jìn)行三維定位,本文中根據(jù)波疊加法基本思想,提出了基于波束形成的噪聲源三維定位方法。試驗(yàn)結(jié)果表明,所提出方法可準(zhǔn)確識(shí)別噪聲源三維坐標(biāo),并可通過等效源強(qiáng)度計(jì)算和重建面聲壓重建,有效抑制波束形成旁瓣效應(yīng)造成的虛假聲源干擾。
(2)所提出方法中對(duì)聲源進(jìn)行了假設(shè),即通過中遠(yuǎn)程陣列聲壓測(cè)量時(shí),被定位聲源可近似為點(diǎn)聲源,因此該算法更適用于分布較為稀疏的點(diǎn)聲源三維定位。
