群機(jī)器人自組織聚集行為及協(xié)同圍捕研究
2019-11-07 07:36:26麻軒海
兵器裝備工程學(xué)報(bào) 2019年10期
關(guān)鍵詞:模型
楊 衛(wèi),曾 亮,麻軒海
(1.中北大學(xué) 電子測(cè)試技術(shù)國(guó)防科技重點(diǎn)實(shí)驗(yàn)室,太原 030051; 2.中北大學(xué)工作儀器科學(xué)與動(dòng)態(tài)測(cè)試教育部重點(diǎn)實(shí)驗(yàn)室,太原 030051; 3.浙江紅旗機(jī)械有限公司,浙江 德清 313200)
近年來(lái),隨著機(jī)器人技術(shù)的發(fā)展[1],機(jī)器人群體協(xié)同控制受到越來(lái)越多的關(guān)注。關(guān)于群體模式形成的建模方法主要有基于幾何圖論法、基于行為的方法、人工物理法等[2-4]。
陳世明等[5-6]在群體空間存在可觀測(cè)鏈假設(shè)條件下,個(gè)體通過(guò)計(jì)算出包括自身位置在內(nèi)所有可觀測(cè)范圍內(nèi)的個(gè)體位置所決定的最小外接圓圓心,并將其作為個(gè)體的目標(biāo)位置,最終實(shí)現(xiàn)了群體的聚集。Desai[7]提出一種控制圖指派算法,將一個(gè)有向無(wú)環(huán)控制圖用于約束群體空間位置關(guān)系,并給出一個(gè)四層的模塊化體系結(jié)構(gòu),實(shí)現(xiàn)了群體隊(duì)形的有效控制。Zhen等[8]對(duì)智能體的交互拓?fù)浣#瑢⒚織l邊與相鄰智能體之間的時(shí)變權(quán)重相關(guān)聯(lián),并驗(yàn)證該時(shí)變拓?fù)鋱D可以在預(yù)定時(shí)間范圍內(nèi)完成聚集。采用圖論結(jié)合控制理論的方法對(duì)群機(jī)器人系統(tǒng)控制,其優(yōu)點(diǎn)在于其形式化理論較為成熟,然而卻無(wú)法勝任含有大量成員的群體分布式控制。
Spears等[9-10]受自然界物體間相互作用規(guī)律的啟發(fā),提出了基于“人工物理(AP)”的分布式控制方法,通過(guò)模擬物理學(xué)中的萬(wàn)有引力原理實(shí)現(xiàn)了控制群體系統(tǒng)組隊(duì)的目的。徐望寶等[11-12]提出了一種組群機(jī)器人隊(duì)形控制的人工力矩法,通過(guò)引入吸引線段式主——從隊(duì)形圖建立了組群機(jī)器人的系統(tǒng)模型,實(shí)現(xiàn)了群機(jī)器人的隊(duì)形控制。
基于行為的方法是Brooks[13]在研究細(xì)胞機(jī)器人行為時(shí)提出的一種群體控制結(jié)構(gòu),該法優(yōu)勢(shì)在于并行、分布及實(shí)時(shí)性,且控制策略的獲得相對(duì)容易。MarcoDorigo[14]受社會(huì)昆蟲啟發(fā),采用行為法研究實(shí)現(xiàn)了近視機(jī)器人的聚集,其中個(gè)體只能感覺(jué)到整個(gè)環(huán)境中有限的范圍,其控制器使用了進(jìn)化和概率論的方法;Soysal和Sahin[15]為個(gè)體機(jī)器人制定了的三種簡(jiǎn)單行為:排斥、接近、靜止,通過(guò)感知交互并改變系統(tǒng)參數(shù)實(shí)現(xiàn)了動(dòng)、靜兩種狀態(tài)下的聚集行為。由于基于行為法需要不停的迭代調(diào)整個(gè)體行為,Brambilla[16]提出一種自頂向下的行為設(shè)計(jì)方法。這種自頂向下的行為法雖然減少了個(gè)體行為的迭代過(guò)程,但卻增加了設(shè)計(jì)中系統(tǒng)模型的迭代修正過(guò)程,加大了群體設(shè)計(jì)的復(fù)雜度。劉強(qiáng)[17]將基于行為的方法與不同的機(jī)器學(xué)習(xí)方法相融合,應(yīng)用于機(jī)器人編隊(duì)控制中,解決了常規(guī)的基于行為的方法中參數(shù)配置困難的問(wèn)題。張明亮等[18]基于多Agent理論,確定了戰(zhàn)時(shí)裝備維修保障過(guò)程中的各類型Agent實(shí)體、行為及交互規(guī)則,并借助Anylogic仿真平臺(tái)實(shí)現(xiàn)了模型的建模。綜述以上方法,本文將人工物理法與自下而上的行為法相結(jié)合,進(jìn)行群機(jī)器人自組織行為的建模分析。
1 聚集行為運(yùn)動(dòng)控制模型
假設(shè)群機(jī)器人(Swarm Robots)系統(tǒng)SR={R1,R2,…,RN},N為群體規(guī)模,xRi(t)∈R2表示Ri(i=1,2,…,N)在t時(shí)刻的位置,vRi(t)∈R2(||vRi(t)||≤vmax)為Ri在t時(shí)刻的速度,PRi(t)={||Rj|dij=||xRi(t)-xRj(t)≤r, andRj∈SR}為Ri在t時(shí)刻感知范圍內(nèi)機(jī)器人集合,其中r為最大感知半徑,個(gè)體Ri(i=1,2,…,N)在t時(shí)刻的感知狀態(tài)空間表示為:Si(t)={xRi(t),vRi(t),PRi(t)}。
1.1 運(yùn)動(dòng)目標(biāo)的確定
通過(guò)感知范圍內(nèi)個(gè)體決策與群體決策的加權(quán)計(jì)算產(chǎn)生目標(biāo),個(gè)體在t+1時(shí)刻的目標(biāo)通過(guò)簡(jiǎn)單的個(gè)體感知中心與感知范圍內(nèi)群體的感知中心來(lái)確定,表示為:
(1)
式(1)中: size(PRi(t))為個(gè)體感知范圍內(nèi)機(jī)器人的數(shù)量;λj、λk為個(gè)體決策目標(biāo)的權(quán)重。通過(guò)權(quán)值不同區(qū)別自身與其他成員在決策中的作用,實(shí)際設(shè)計(jì)中,為實(shí)現(xiàn)個(gè)體同構(gòu)且行為規(guī)則簡(jiǎn)單,λj、λk按照同樣的方法進(jìn)行取值。
1.2 基于質(zhì)點(diǎn)系力學(xué)模型的狀態(tài)轉(zhuǎn)移方程
將群機(jī)器人看作一個(gè)質(zhì)點(diǎn)系力學(xué)系統(tǒng),每個(gè)個(gè)體都受其目標(biāo)吸引和其感知范圍內(nèi)其他個(gè)體的排斥,在合力作用下,個(gè)體不斷調(diào)整自身的運(yùn)動(dòng)狀態(tài),找尋動(dòng)態(tài)的平衡。本文依據(jù)群機(jī)器人聚集的行為要求,從函數(shù)的角度采用線性力與指數(shù)型力模型對(duì)個(gè)體之間的行為進(jìn)行約束。
1) 線性力模型描述力隨距離的線性變化關(guān)系。
目標(biāo)對(duì)Ri產(chǎn)生的吸引力FA和感知范圍內(nèi)鄰居對(duì)個(gè)體產(chǎn)生的排斥力FR分別為:
(2)
2) 指數(shù)型力模型描述力隨距離的指數(shù)變化關(guān)系。
指數(shù)型吸引力和排斥力模型分別為:
(3)
個(gè)體機(jī)器人在運(yùn)動(dòng)過(guò)程中所受合力構(gòu)成包含四種方式,如表1所示。
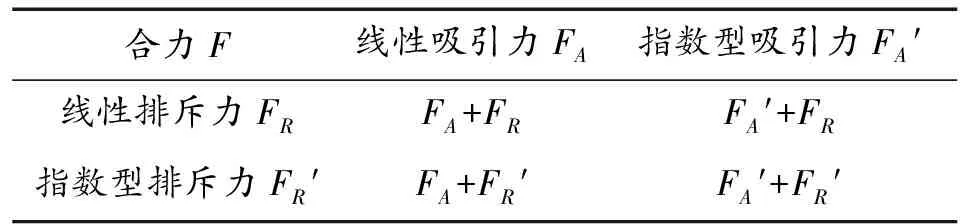
表1 個(gè)體合力構(gòu)成方式
假設(shè)所有機(jī)器人質(zhì)量為1,在方程式(2)、式(3)合力作用下,采用牛頓加速度模型a=F/m,可得個(gè)體狀態(tài)轉(zhuǎn)移方程為:
vRi(t+1)=vRi(t)+F
xRi(t+1)=xRi(t)+vRi(t)
(4)
通過(guò)此方程可以實(shí)現(xiàn)所有機(jī)器人位置與速度在空間中的狀態(tài)轉(zhuǎn)移。
1.3 基于感知狀態(tài)權(quán)值分配的個(gè)體狀態(tài)轉(zhuǎn)移
機(jī)器人運(yùn)動(dòng)過(guò)程中,正前方感知范圍內(nèi)的環(huán)境狀態(tài)對(duì)其下一步?jīng)Q策通常起著更大的作用,以下將個(gè)體狀態(tài)轉(zhuǎn)移函數(shù)分成方向角函數(shù)與速率函數(shù)分別加以分析設(shè)計(jì)。

φRi(t+1)=f(x1(t),x2(t),…,xm+1(t))
(5)
(x1(t),x2(t),…,xm+1(t)) =
其中,xi(t)∈[0,2π)表示第i個(gè)決策條件,所有決策條件構(gòu)成機(jī)器人t+1時(shí)刻的m+1維決策空間,f為決策空間上的線性泛函。
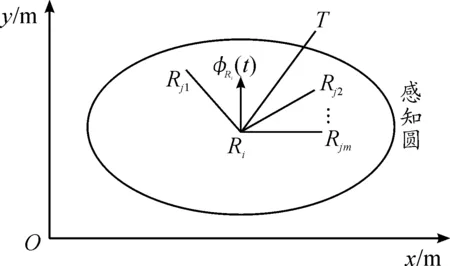
圖1 機(jī)器人局部感知

(6)
相反情況,駐點(diǎn)具有吸引作用,則可得:
(7)
線性范函綜合決策空間中所有因素,通過(guò)線性疊加實(shí)現(xiàn)機(jī)器人下一時(shí)刻方向角的選取,其表達(dá)式為:
(1) 在抗滑樁間距為最佳樁間距時(shí),樁后土拱與樁側(cè)土拱聯(lián)合并存,聯(lián)合的土拱可分解為兩個(gè)單獨(dú)的土拱[14]。
(8)

(9)

v(t)=g(y1(t),y2(t),…,ym+1(t))
(10)
式(10)中,yi(t)為m+1維狀態(tài)中第i項(xiàng)的速率函數(shù),在安全距離外機(jī)器人做加速運(yùn)動(dòng),直到最大速度vmax,反之做減速運(yùn)動(dòng),直到停止。安全距離的計(jì)算可以根據(jù)機(jī)器人的牽引力、制動(dòng)力以及機(jī)器人質(zhì)量求得,在此假設(shè)最大加速度為a,則相對(duì)t時(shí)刻速度yi(t)的安全速度為:
(11)
大于安全速度須做減速運(yùn)動(dòng),小于安全速度可以做加速運(yùn)動(dòng),直到vmax后勻速運(yùn)動(dòng),根據(jù)方向角函數(shù)設(shè)計(jì)的原理可得:
(12)
式(12)中,yi(t)∈[0,vmax]。
(13)
2 聚集行為評(píng)價(jià)指標(biāo)及實(shí)驗(yàn)結(jié)果分析
2.1 聚集行為評(píng)價(jià)指標(biāo)
為了分析群機(jī)器人采用力學(xué)模型聚集的性能,定義一些性能指標(biāo)加以評(píng)價(jià)。
1) 簇?cái)?shù)。聚集過(guò)程中,群機(jī)器人形成一些相對(duì)密集的小群體,稱之為簇,表示為cluster,小群體的數(shù)量稱為簇?cái)?shù),表示為n=size(cluster),并用cluster(j)表示第j簇,nj=size(cluster(j))表示第j簇的個(gè)體數(shù)量。簇?cái)?shù)反映了群機(jī)器人系統(tǒng)的整體聚集程度或分散程度,簇?cái)?shù)越多,群體聚集效果越差。
levelAggre越大聚集度越高。
3) 簇內(nèi)分布均勻度。對(duì)于群內(nèi)每一個(gè)機(jī)器人Ri,找出其最近的鄰居并記錄其距離值序列dmin_Ri(i= 1,2,…,N),用序列的方差表示分布均勻度,即:
levelUniformity越小,則分布均勻度越高。
2.2 聚集行為實(shí)驗(yàn)分析
在50×50平面區(qū)域內(nèi)隨機(jī)布撒機(jī)器人,通過(guò)個(gè)體目標(biāo)確定和個(gè)體狀態(tài)轉(zhuǎn)移模型進(jìn)行聚集行為實(shí)驗(yàn),研究不同情況下的聚集效果。實(shí)驗(yàn)中設(shè)置:vmax=4 m/s,αi=1,σ=0.8, Δt=0.2 s,a=1 m/s2,個(gè)體與其目標(biāo)之間的不受力距離設(shè)為dRT=0,吸引力系數(shù)為ω1=γ1=0.5,個(gè)體與個(gè)體之間的臨界距離設(shè)為dRR=2,排斥力系數(shù)為ω2=γ2=0.2。
群體規(guī)模由10~50個(gè)遞增,個(gè)體感知半徑r由10~30遞增,分別對(duì)質(zhì)點(diǎn)系力學(xué)模型、感知狀態(tài)權(quán)值分配模型進(jìn)行仿真實(shí)驗(yàn),得到了關(guān)于不同模型的群機(jī)器人聚集行為模式,以下是對(duì)聚集行為的分析。
2.2.1影響簇?cái)?shù)的因素
在50×50平面區(qū)域內(nèi)隨機(jī)布撒機(jī)器人,由上文仿真實(shí)驗(yàn)可知:當(dāng)機(jī)器人規(guī)模超過(guò)20,感知半徑大于20時(shí),簇?cái)?shù)基本為1,能實(shí)現(xiàn)全體聚集。本文針對(duì)機(jī)器人規(guī)模為50,感知半徑分別為10、20、30三種情況下,分別進(jìn)行10次實(shí)驗(yàn),得到簇?cái)?shù)隨感知半徑變化的統(tǒng)計(jì)結(jié)果如圖2所示,可知感知半徑是影響聚集性能的重要因素。

圖2 簇?cái)?shù)隨感知半徑變化的統(tǒng)計(jì)結(jié)果
2.2.2聚集度試驗(yàn)結(jié)果分析
圖3為對(duì)不同感知半徑、不同群體規(guī)模情況下群體聚集度試驗(yàn)統(tǒng)計(jì)結(jié)果,統(tǒng)計(jì)結(jié)果表明聚集能力最強(qiáng)的是感知狀態(tài)加權(quán)模型,另外,還可以發(fā)現(xiàn)聚集度較強(qiáng)的模型受感知半徑、群體規(guī)模的影響較大,而聚集度最弱的模型幾乎不受感知半徑、群體規(guī)模的影響,這為我們后面設(shè)計(jì)群機(jī)器人區(qū)域覆蓋提供了依據(jù)。
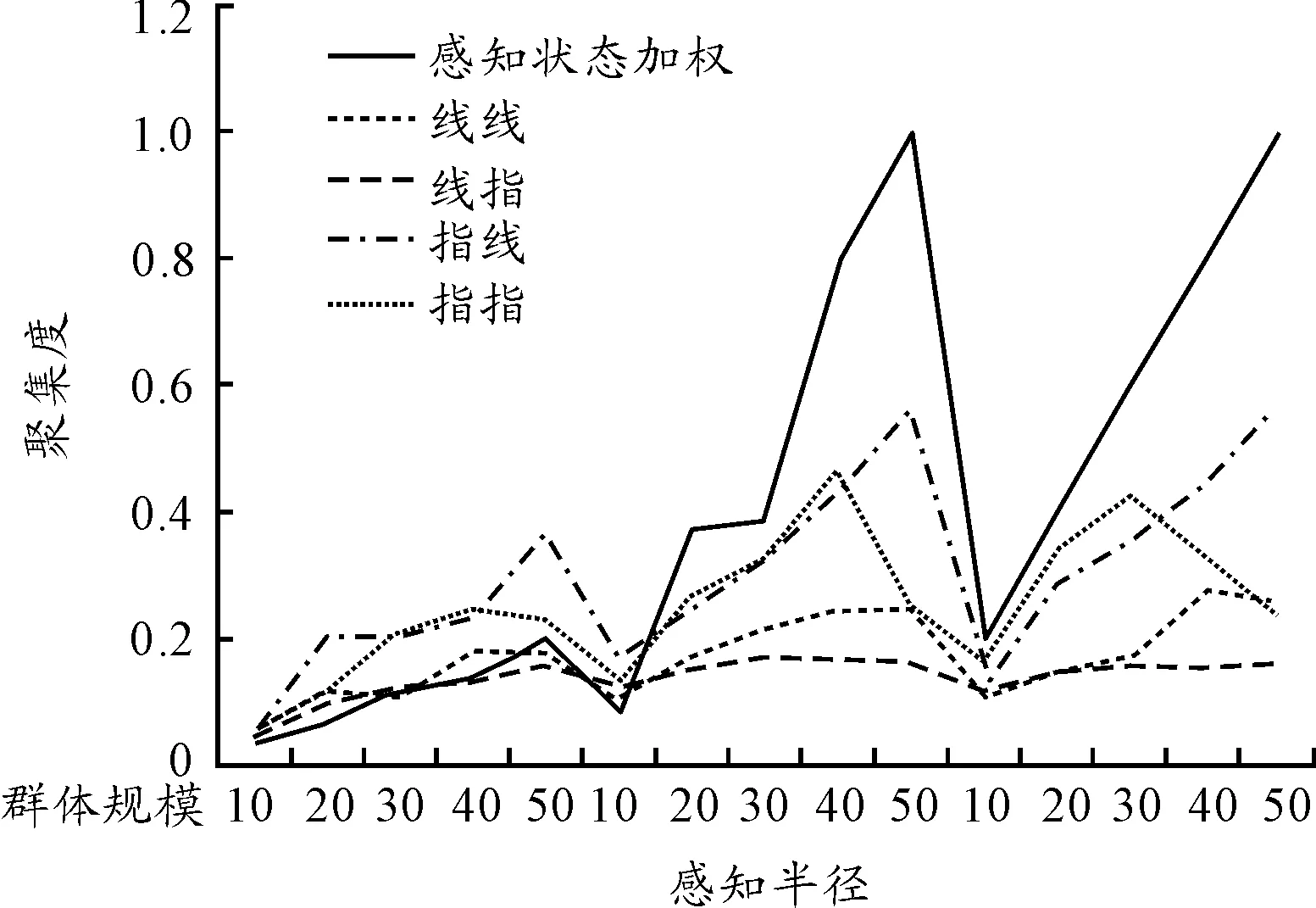
圖3 不同模型的聚集度
2.2.3簇內(nèi)分布均勻度試驗(yàn)結(jié)果分析
圖4為對(duì)不同感知半徑、不同群體規(guī)模情況下群體均勻度實(shí)驗(yàn)統(tǒng)計(jì)結(jié)果。結(jié)果顯示不同模型在感知半徑大于20時(shí)均勻度相對(duì)穩(wěn)定,特別關(guān)注線指模型,其均勻度表現(xiàn)最優(yōu),其均勻度非常穩(wěn)定。

圖4 不同模型的均勻度
另外,關(guān)于線指模型均勻度,作者進(jìn)行了更加深入的研究,當(dāng)其運(yùn)行處于穩(wěn)定狀態(tài)時(shí),簇內(nèi)聚集度只與個(gè)體之間的臨界距離、作用力系數(shù)相關(guān),而與個(gè)體其他參數(shù)無(wú)關(guān)。
3 模型驗(yàn)證試驗(yàn)
選用均勻度特性極強(qiáng)的線指模型,通過(guò)個(gè)體臨界距離的設(shè)置產(chǎn)生群機(jī)器人領(lǐng)域行為,以實(shí)現(xiàn)群體對(duì)目標(biāo)的圍捕為目的進(jìn)行仿真實(shí)驗(yàn)。
當(dāng)有目標(biāo)出現(xiàn)時(shí),首先發(fā)現(xiàn)目標(biāo)的機(jī)器人受目標(biāo)吸引作用向目標(biāo)靠近,同時(shí)通過(guò)廣播解除群機(jī)器人系統(tǒng)領(lǐng)域行為模式,啟用圍捕模式,個(gè)體之間充分協(xié)作,可以相互靠近,在聚集行為模型中,縮小個(gè)體之間最小臨界距離,通過(guò)目標(biāo)引導(dǎo)的群機(jī)器人聚集行為實(shí)現(xiàn)圍捕。
在區(qū)域100×100范圍內(nèi)隨機(jī)布局群機(jī)器人,規(guī)模N=10、30,個(gè)體感知半徑r=20,個(gè)體之間臨界距離dij=2。
目標(biāo)作直線運(yùn)動(dòng)時(shí):起點(diǎn)為[0,0],速率為1 m/s,方向角為π/4;
目標(biāo)作曲線運(yùn)動(dòng)時(shí):起點(diǎn)為[0,0],速率為1 m/s,方向角為π/4+sin(t/5),采用線性吸引指數(shù)型排斥模型,圍捕結(jié)果如圖5所示。

圖5 線性吸引指數(shù)型排斥模型群體圍捕結(jié)果
實(shí)際測(cè)試中,由于場(chǎng)地限制,選用30 m×30 m的平坦地面進(jìn)行試驗(yàn),設(shè)置目標(biāo)起點(diǎn)(0,0),速度1 m/s,方向角函數(shù)t/100,以曲線運(yùn)動(dòng)掠過(guò)布撒區(qū)域,檢測(cè)線性吸引指數(shù)型排斥模型對(duì)目標(biāo)的圍捕效果。得到了如圖6所示的實(shí)驗(yàn)結(jié)果,其中標(biāo)識(shí)target處為目標(biāo)系統(tǒng)規(guī)劃出的針對(duì)目標(biāo)的最優(yōu)圍捕點(diǎn)。

圖6 圍捕實(shí)驗(yàn)結(jié)果
4 結(jié)論
本文通過(guò)對(duì)群機(jī)器人自組織聚集行為進(jìn)行建模,并對(duì)不同運(yùn)動(dòng)控制模型進(jìn)行分析比較,為進(jìn)行機(jī)器人群編隊(duì)實(shí)現(xiàn)不同功能時(shí)選用最優(yōu)運(yùn)動(dòng)模型奠定了基礎(chǔ)。進(jìn)一步通過(guò)對(duì)機(jī)器人群對(duì)目標(biāo)的協(xié)同圍捕仿真試驗(yàn),驗(yàn)證了建立的線性吸引力、指數(shù)排斥力模型聚集度與均勻度好的特性。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19