海上浮動平臺運動補償裝置的補償空間分析?
2019-11-07 01:46:24常宗瑜陳忠鑫鄭中強楊玉虎周顯宜何靜文
中國海洋大學學報(自然科學版) 2019年12期
常宗瑜, 陳忠鑫, 鄭中強, 楊玉虎, 周顯宜, 何靜文
(1. 中國海洋大學工程學院,山東 青島 266100;2. 山東省海洋工程重點實驗室,山東 青島 266100;3.天津大學機械工程學院,天津 300072)
隨著人們對海洋資源開發(fā)的日益重視和海洋工程技術的發(fā)展,各類海上浮動平臺如船舶、半潛平臺、SPAR和FPSO等已經(jīng)被廣泛應用于海上運輸和資源開采,然而海洋環(huán)境中的海上浮動平臺在波浪載荷的作用下會產(chǎn)生橫搖、縱搖、艏搖、垂蕩、橫蕩、縱蕩及其相互耦合運動[1],這會對平臺上的儀器設備、工程人員等產(chǎn)生不利的影響。
由于并聯(lián)機構具有可以實現(xiàn)多自由度耦合運動、承載力大、響應速度快等特點[2],被各國學者用于運動補償平臺的機構原型。近年來,基于并聯(lián)機構的運動補償裝置得到了較全面的研究。文獻[3]針對船舶的橫搖和縱搖,設計了一類有冗余驅動分支的兩自由度并聯(lián)平臺,包括2-RPU、2-SPU與2-RRU等型;文獻[4]采用并聯(lián)3SPS/3SS結構研發(fā)了T700型運動補償平臺,該平臺可以有效補償駁船的垂蕩、縱搖、橫搖運動,實現(xiàn)在高海況下的安全吊裝;文獻[5]提出一種IPTS-1PS-1PRS的三自由度并聯(lián)機構;文獻[6]為補償船舶的橫搖、縱搖、橫蕩和垂蕩,提出了四自由度并聯(lián)平臺;文獻[7、8]介紹了人員轉移到海上風機塔的裝置——Ampelmann,該裝置利用Stewart并聯(lián)機構來補償波浪導致的多自由度運動;文獻[9]研究了應用于艦載穩(wěn)定平臺的6-PUS型并聯(lián)機構,該機構主要包括起上、下平臺和靜載平衡裝置以及對稱分布的六個PUS運動分支;文獻[10]設計了一種基于微慣導傳感器的6-UPU并聯(lián)主動波浪補償平臺樣機及其試驗系統(tǒng)等。
通常認為垂蕩、縱搖和橫搖運動在海上平臺的運動響應中占有主導地位,文獻[11]對基于Stewart機構的穩(wěn)定裝置在垂蕩、縱搖和橫搖方向上的運動補償空間進行了計算分析。需要指出的是,由于海上平臺的空間限制,運動補償裝置往往不能安裝在平臺的中心位置,因此,補償橫蕩、縱蕩運動是必要的。因此本文以基于Stewart并聯(lián)機構的運動補償裝置為對象,利用機構運動分析和邊界空間搜索法對其平動運動(垂蕩、縱蕩和橫蕩)的補償空間進行了研究。
如圖1所示為海上浮動平臺及Stewart型運動補償裝置示意圖,海上浮動平臺在波浪載荷下具有六個自由度的運動。在海上浮動平臺上建立絕對坐標系O-XYZ,其中心處于船舶的幾何中心A點上,在浮動平臺上任意一點位置安裝有Stewart型的運動補償裝置,該機構由上下兩個平臺構成,下平臺固定在海上浮動平臺上,上平臺與下平臺之間通過六條可以伸縮的桿件組成,建立固連在運動補償裝置上的坐標系o-xyz。
該裝置通過位姿傳感器監(jiān)測平臺上A點六個方向上的運動,通過設定上平臺保持姿態(tài)穩(wěn)定,對機構各桿長度進行求解,進而控制桿件長度實現(xiàn)上平臺穩(wěn)定[12]。其基本原理如圖2所示。
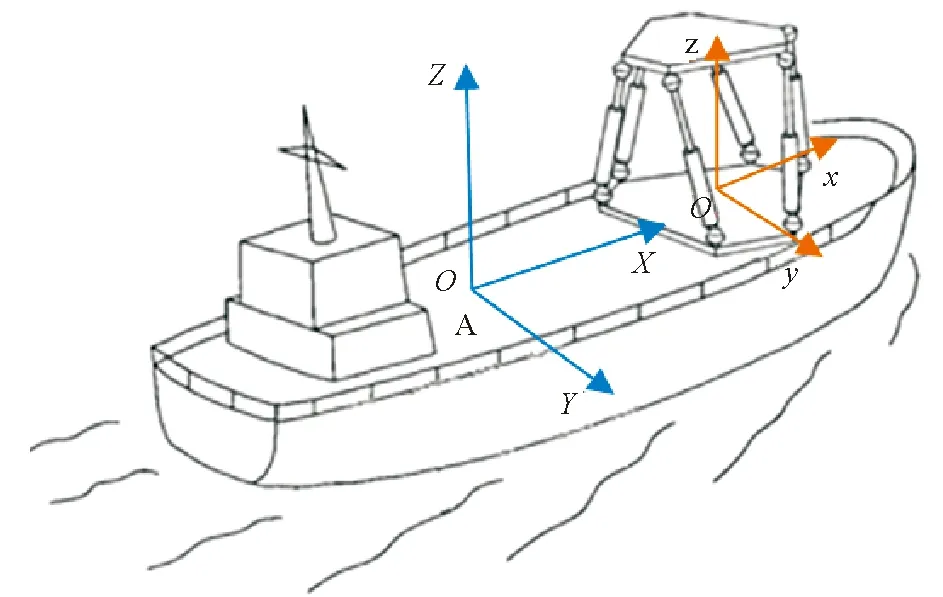
圖1 船舶及運動補償系統(tǒng)Fig.1 Ship and motion compensation system
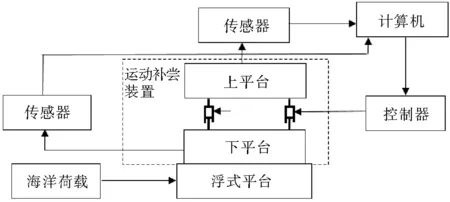
圖2 海上浮動平臺補償系統(tǒng)原理圖Fig.2 Diagram of the offshore floating platform compensation system
一般情況下,進行運動補償裝置的設計前需要確定海上浮動平臺的運動范圍,目前主要通過兩種方式,第一種是調(diào)研目標海域的環(huán)境狀況,根據(jù)波浪理論設定波浪譜和波浪模型,結合通過海上浮動平臺的結構參數(shù)和物理參數(shù)求取的海上浮動平臺的響應幅值算子(Response Amplitude Operator或RAO),得到海上浮動平臺的運動范圍;第二種是通過位置姿態(tài)傳感器等對海上浮動平臺的運動進行長時間監(jiān)測獲得海上浮動平臺的運動范圍。通過將設計的運動補償裝置的補償空間與海上浮動平臺的運動范圍進行對比,使之能夠實現(xiàn)最大的極限運動范圍的補償,這是進行機構尺度綜合及裝置詳細設計的前提。
由上可見,空間機構的補償空間分析是進行補償裝置設計的重要環(huán)節(jié),為驗證所設計運動補償裝置能否滿足海上浮動平臺的補償要求提供了依據(jù)。
1 運動補償空間的計算
本文以基于Stewart型并聯(lián)機構的運動補償裝置為例進行了運動補償空間的求解。圖3(a)所示為Stewart機構的結構簡圖及上下平臺的兩個坐標系。如圖3(b)所示為當下平臺隨著海上浮動平臺運動時,6個驅動桿的變化。
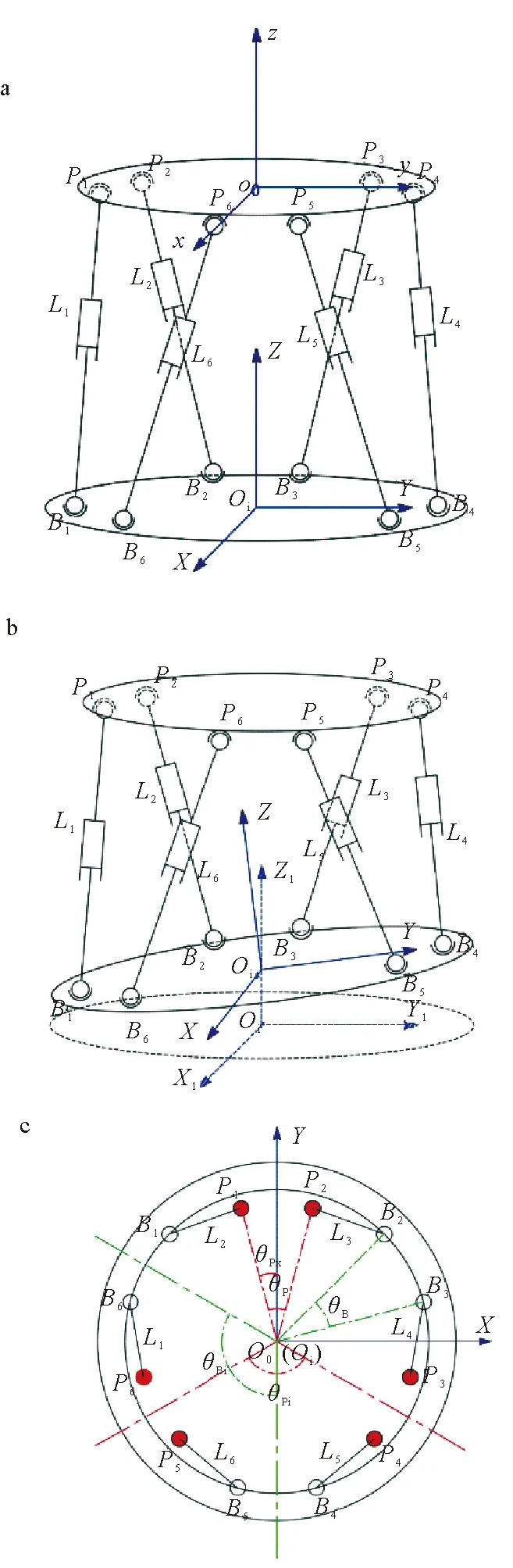
圖3 Stewart機構簡圖Fig.3 Schematic of Stewart
如圖3(c)所示,其中,B1、B2…B6為下平臺的六個鉸接點,P1、P2…P6為上平臺的六個鉸接點。θB與θP為下平臺和上平臺臨近兩個鉸接點的夾角。θBi與θPi為相鄰兩對鉸接點之間的夾角。θPx為上平臺第一個鉸接點與本體坐標系x軸的夾角。

采用Z-Y-X歐拉角表示本體坐標系O在慣性坐標系下的姿態(tài)角,繞XYZ旋轉的歐拉角分別為Φ、θ、ψ,則慣性坐標系與物體坐標系之間的變換矩陣可以表示為
(1)

(2)
其中n=1,2,,…,6,表示鉸接點的排列位置。
Stewart平臺的立體結構如圖3所示,給定ln(n=1,2,3,4,5,6)為油缸運動過程中的長度,則
(3)
其中in(n=1,2,3,4,5,6)為油缸長度方向的單位矢量。即
通過將六個油缸的長度ln(n=1,2,3,4,5,6)與給定的油缸長度極限lmin、lmax進行比較,結合其他兩個限制量(連接副最大轉角θBmax、θCmax,油缸桿的干涉直徑)進行比較分析,若三個限制量任意一個都沒有超過其極限值,即lmin≤ln≤lmax、θB≤θBmax、θC≤θCmax、d≤D,滿足以上條件的空間離散點則可以組成補償空間。
本節(jié)基于邊界空間搜索法[13-14]以平動補償空間為例進行分析,利用補償空間限制條件的求解方法,結合已經(jīng)設計出的Stewart平臺各個構件的尺寸參數(shù)包括驅動桿的桿長極限lmin、lmax,連接副最大轉角的限制θBmax、θCmax,驅動桿的干涉直徑D,約束條件允許的補償空間的極限Zmin、Zmax,極角的增量值Δγ,極徑的增量值Δρ等,從而可以求解出機構的平動補償空間。
2 運動補償空間的計算
2.1 Stewart平臺結構參數(shù)設計
根據(jù)確定的海浪運動參數(shù)結合所給的運動補償空間要求,本文設計的Stewart平臺結構參數(shù)如表1所示。其中,上平臺的6個球鉸鏈的連接位置和夾角如圖4(a)所示,下平臺的6個萬向鉸鏈的連接位置和夾角如圖4(b)所示:

表1 Stewart平臺參數(shù)Table 1 The parameter of Stewart mechanism Cylinder diameter
Note:①Upper platform radius;②Lower platform radius;③The miximum limit of the cylinder;④The minimum limit of the cylinder;⑤The limit of the hinge angle
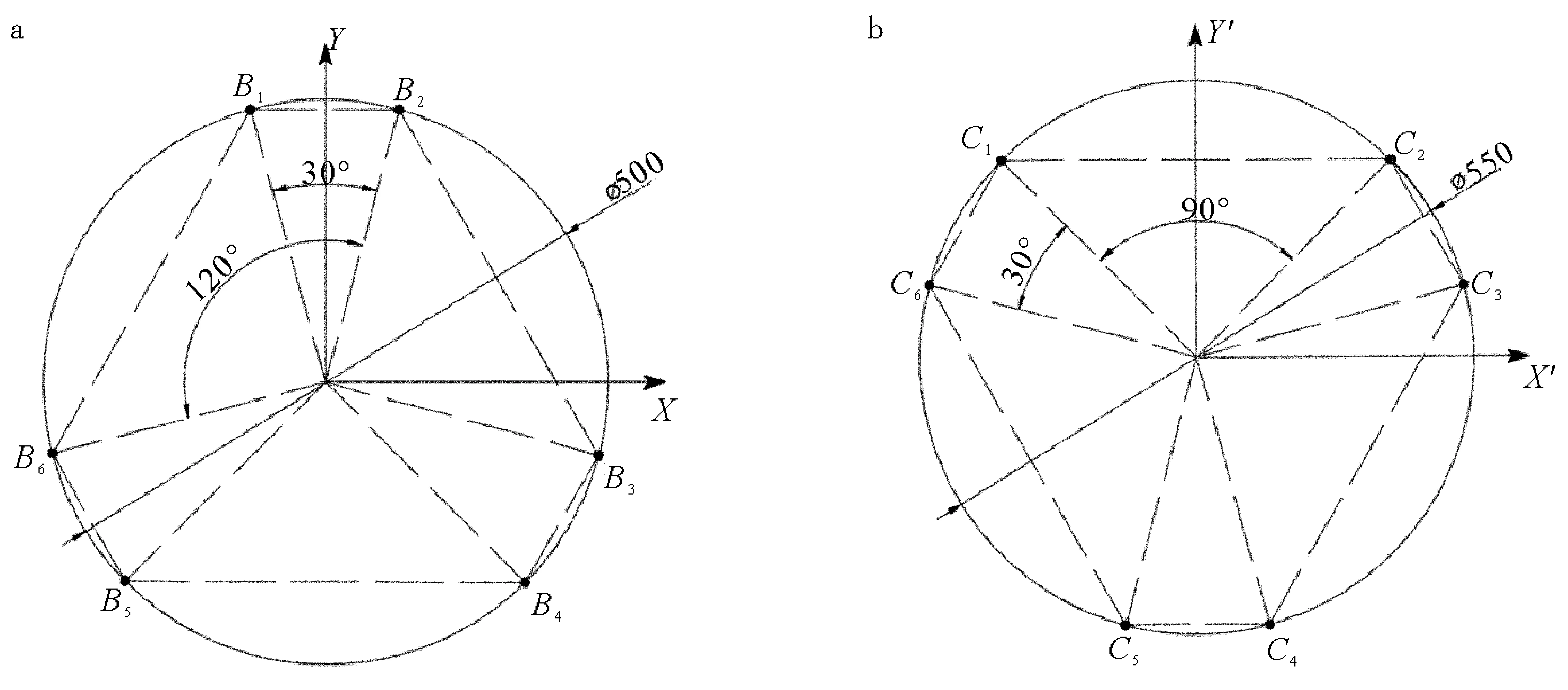
圖4 運動補償平臺及固連船只平臺鉸鏈分布Fig.4 The hinges distribution of motion compensation platform and fixed ship platform
2.2 平動補償空間的求解
Stewart型運動補償平臺在空間上有六個方向的運動,分別為沿X、Y和Z軸的平動以及繞X、Y和Z軸的轉動,將沿X、Y和Z軸平動的離散點組成的空間定義為平動補償空間,通過改變平臺在沿X、Y和Z軸的平動初始位置和繞X軸轉動的角度即橫搖角度得到平動補償空間。

((a)沿Z軸平移初始值變化時的補償空間;(b)橫搖角初始值變化時的補償空間)
圖5 運動補償平臺平動補償空間在XY面上的二維圖
Fig.5 The two-dimensional graph of the compensation space on the motion compensation platform on theXYsurface
圖5(a)表示Stewart運動補償平臺的初始位置在繞X、Y和Z軸的轉動角度為0°時,沿著Z軸平動的初始位置分別為700、800和900 mm時,平動補償空間示意圖。由圖中可以發(fā)現(xiàn)平動補償空間呈對稱分布,且隨著沿Z軸的初始位置的值增大,平動補償空間先增大后減小。
圖5(b)表示當Stewart運動補償平臺沿Z軸平動的初始位置為800 mm,繞Y、Z軸初始位置的轉動角度為0°時,Stewart運動補償平臺繞X軸的初始位置角度即橫搖角度是10°、0°、-10°時,平動補償空間示意圖。由圖中可以看出隨著Stewart運動補償平臺繞X軸的初始位置角度的絕對值的增大,平動補償空間逐漸減小且在繞X軸的初始位置角度為10°和-10°時平動補償空間的大小是相同的。
((a) 沿Y軸平移初始值變化時的補償空間;(b)橫搖角初始值變化時的補償空間)
圖6 運動補償平臺平動補償空間在XZ面上的二維圖
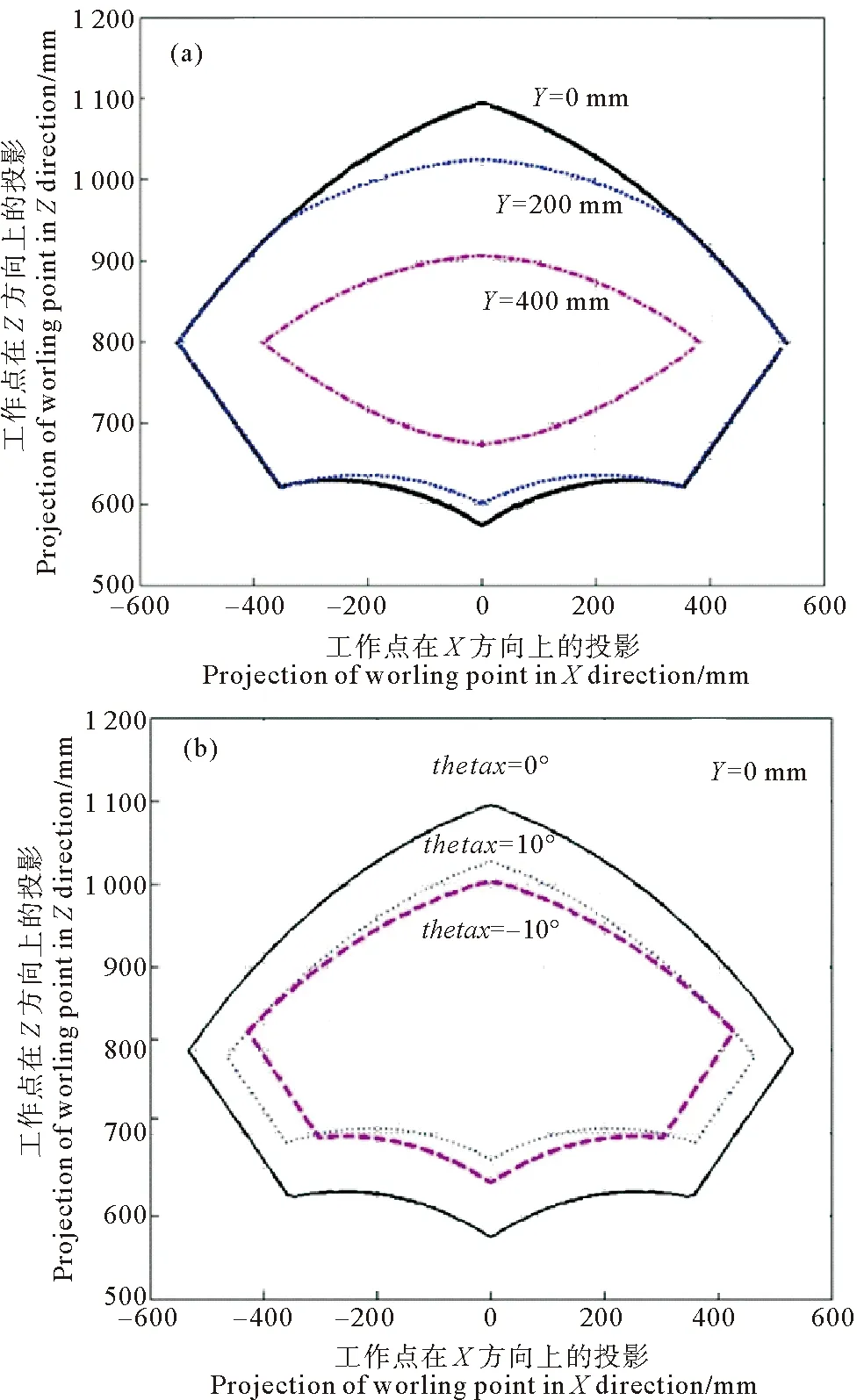
Fig.6 The two-dimensional graph of the compensation space on the motion compensation platform on theXZsurface
圖6(a)表示Stewart運動補償平臺的初始位置在繞X、Y和Z軸的轉動角度為0°時,沿著Y軸平動的初始位置分別為0、200 和400 mm時,平動補償空間示意圖。由圖中可以發(fā)現(xiàn)此時的平動補償空間呈對稱分布,且隨著沿Y軸的初始位置的值增大,平動補償空間逐漸減小。
圖6(b)表示當Stewart運動補償平臺沿Y軸平動的初始位置為0 mm,繞Y、Z軸初始位置的轉動角度為0°時,Stewart運動補償平臺繞X軸的初始位置角度即橫搖角度是10°、0°、-10°時,平動補償空間示意圖。通過計算圖中虛線內(nèi)的面積可知繞X軸的初始位置角度為10°和-10°時平動補償空間的大小基本相同的且當繞X軸的初始位置角度為0°時平動補償空間是最大的。
((a)沿X軸平移初始值變化時的補償空間;(b)橫搖角初始值變化時的補償空間)
圖7 運動補償平臺平動補償空間在YZ面上的二維圖
Fig.7 The two-dimensional graph of the compensation space on the motion compensation platform on theYZsurface
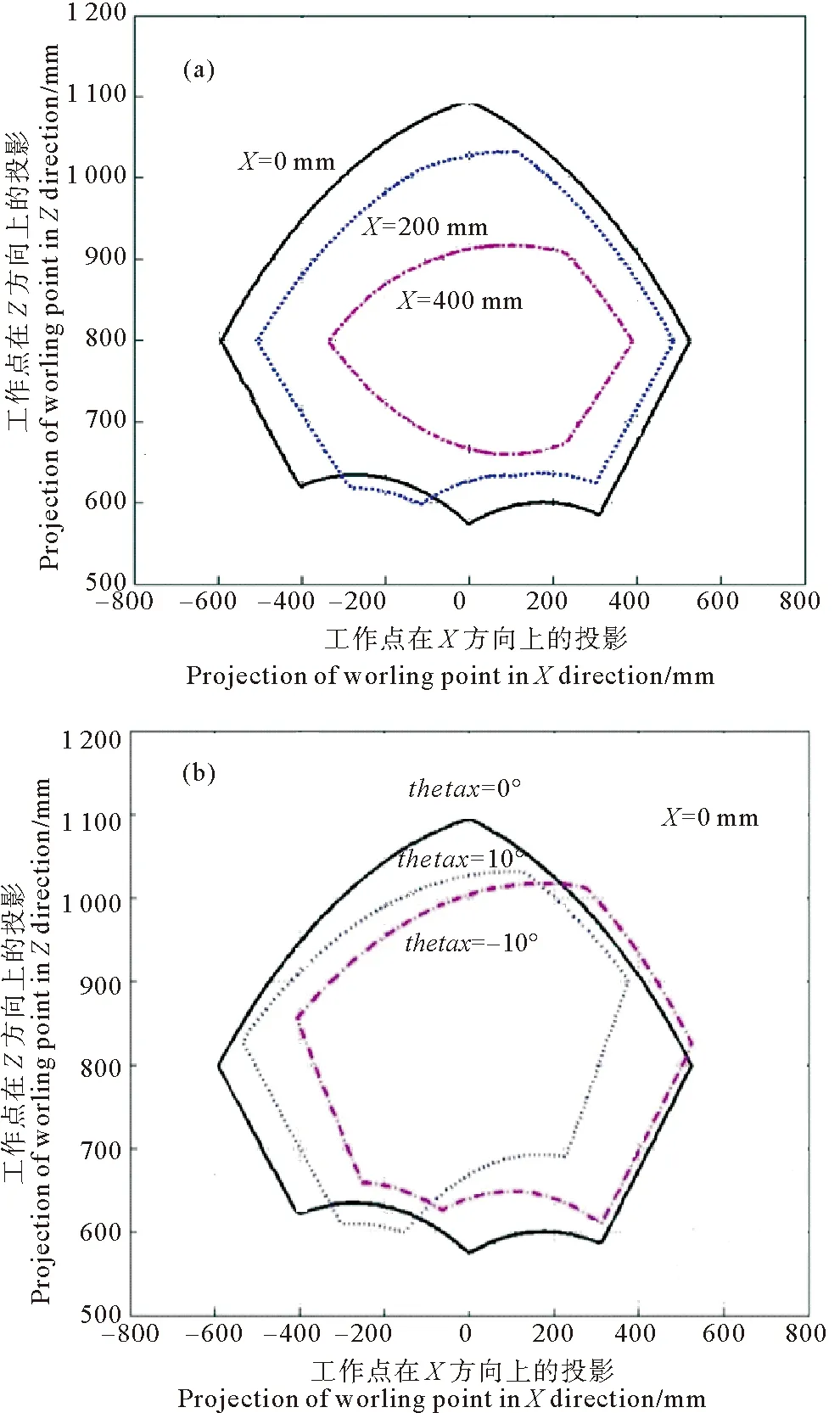
圖7(a)表示Stewart運動補償平臺的初始位置在繞X、Y和Z軸的轉動角度為0°時,沿著X軸平動的初始位置分別為0、200和400 mm時,平動補償空間示意圖。由圖中可以發(fā)現(xiàn)隨著沿X軸的初始位置的值增大,平動補償空間逐漸減小。
圖7(b)表示當Stewart運動補償平臺沿X軸平動的初始位置為0 mm,繞Y、Z軸初始位置的轉動角度為0°時,Stewart運動補償平臺繞X軸的初始位置角度即橫搖角度是10°、0°、-10°時,平動補償空間示意圖。通過對圖中虛線內(nèi)的面積計算可以得出繞X軸的初始位置角度為10°和-10°時平動補償空間大小基本相同。
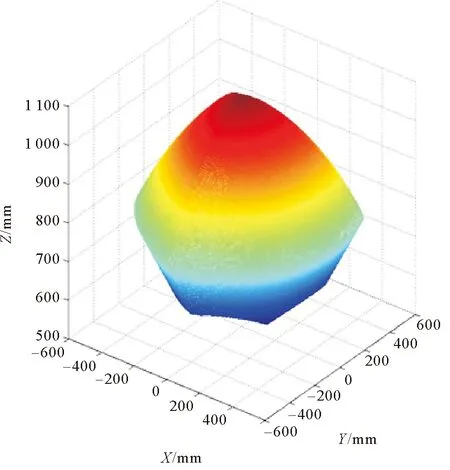
圖8 Stewart型運動補償平臺平動補償空間的三維圖Fig.8 Three-dimensional motion compensation space of Stewart motion compensation platform
圖8表示Stewart運動補償平臺的初始位置在繞X、Y和Z軸的轉動角度為0°時,Stewart運動補償平臺只能沿X、Y和Z軸進行平動的狀態(tài)下平動補償空間的三維圖。
3 結語
本文以Stewart型運動補償裝置為例,對該裝置平動運動的補償空間進行了研究。文中采用并聯(lián)機構運動分析和邊界空間搜索技術給出了運動補償空間的計算方法,對給定參數(shù)的Stewart平臺參數(shù)進行了分析,獲得了平動補償空間區(qū)域,分析了不同初始橫搖、縱搖角度等因素對平動補償空間區(qū)域的空間大小和位置的影響,經(jīng)過計算得出了當Stewart運動補償平臺的初始位置在繞X、Y和Z軸的轉動角度為0°時,平動運動補償空間約為2.4×108mm3。為Stewart型運動補償裝置的設計和控制提供了依據(jù)。
