基于卡爾曼濾波器的半捷聯(lián)導(dǎo)引頭控制系統(tǒng)設(shè)計
2019-11-08 09:18:18韓宇萌賈曉洪
兵器裝備工程學(xué)報 2019年10期
關(guān)鍵詞:卡爾曼濾波
韓宇萌,賈曉洪
(中國空空導(dǎo)彈研究院, 河南 洛陽 471009)
在現(xiàn)代戰(zhàn)爭中,精確制導(dǎo)武器已成為最主要和最有效的攻防手段,紅外制導(dǎo)空空導(dǎo)彈由于具有制導(dǎo)精度高、目標識別能力強、隱蔽性好等優(yōu)點,成為空戰(zhàn)近距格斗不可或缺的精確制導(dǎo)武器[1]。近距格斗中紅外導(dǎo)引頭的主要作用是對目標進行自主搜索、自動識別、快速捕獲和精確跟蹤。目前紅外型空空導(dǎo)彈已經(jīng)發(fā)展到第四代,以滾仰式兩軸框架結(jié)構(gòu)和紅外成像制導(dǎo)技術(shù)為標志,具有較強的目標識別能力和較高的制導(dǎo)精度。滾仰式兩軸框架結(jié)構(gòu)減小了導(dǎo)引頭的體積,增大了導(dǎo)引頭的跟蹤場和隨動范圍。其小型化對改進導(dǎo)彈氣動性能、提高射程具有重要的現(xiàn)實意義,大跟蹤場和隨動范圍對擴大發(fā)射區(qū)實現(xiàn)越肩跟蹤、降低載機機動占位等方面具有重要的現(xiàn)實意義[2-3]。滾仰式兩軸半捷聯(lián)導(dǎo)引頭是第四代紅外空空導(dǎo)彈的理想選擇,美國研制的AIM-9X是其中的典型代表。
1 導(dǎo)引頭控制現(xiàn)狀分析
隨著光電對抗技術(shù)的不斷發(fā)展,在現(xiàn)代戰(zhàn)爭中,沒有人工干擾的凈空作戰(zhàn)條件已經(jīng)不復(fù)存在。紅外空空導(dǎo)彈在鎖定并攻擊目標的過程中,各種紅外有源干擾和目標逃逸相互交織,對紅外導(dǎo)引頭目標識別和穩(wěn)定跟蹤造成嚴重影響[1,4]。同時,近距格斗中導(dǎo)彈高速飛行時的大過載、高機動使得彈體姿態(tài)處在復(fù)雜變化中,再加上導(dǎo)彈外部氣流的擾動,對導(dǎo)引頭的目標跟蹤和穩(wěn)定控制造成嚴重影響。為了提高導(dǎo)引頭控制系統(tǒng)的動態(tài)響應(yīng)性能和跟蹤精度,國內(nèi)外學(xué)者進行了大量的研究。目前,導(dǎo)引頭控制器設(shè)計大部分應(yīng)用的是傳統(tǒng)的PID控制算法[5]。PID控制器結(jié)構(gòu)簡單,對信號具有較好的控制作用,能使系統(tǒng)快速收斂到平穩(wěn)狀態(tài),應(yīng)用廣泛。但PID控制效果依賴于模型,對控制擾動和噪聲的處理能力不足,其控制器參數(shù)的選擇對控制效果影響較大。為了提高導(dǎo)引頭穩(wěn)定平臺的抗擾動能力和跟蹤精度,諸多控制算法被應(yīng)用于導(dǎo)引頭控制系統(tǒng)中。如滑模控制方法被應(yīng)用到導(dǎo)引頭控制器設(shè)計中,它能夠有效隔離彈體擾動,提高導(dǎo)引頭的跟蹤精度和控制魯棒性[6-8]。采用神經(jīng)網(wǎng)絡(luò)的導(dǎo)引頭控制策略,一般是通過對控制系統(tǒng)性能的自適應(yīng)學(xué)習(xí),實現(xiàn)PID控制器參數(shù)的最佳組合從而得到理想的控制效果,但這種神經(jīng)網(wǎng)絡(luò)自適應(yīng)學(xué)習(xí)控制策略,其參數(shù)整定過程繁瑣、算法復(fù)雜,實際應(yīng)用中計算的實時性難以滿足要求[9]。
卡爾曼濾波對控制干擾和測量噪聲具有良好的濾波作用[10],本文針對滾仰式半捷聯(lián)導(dǎo)引頭提出了一種基于目標狀態(tài)估計的卡爾曼濾波方法應(yīng)用于導(dǎo)引頭控制,該方法結(jié)合了卡爾曼濾波器在濾除干擾噪聲方面的良好性能,能夠使?jié)L仰式半捷聯(lián)導(dǎo)引頭在外部擾動和系統(tǒng)噪聲的作用下保持對運動目標的精確跟蹤。
2 導(dǎo)引頭控制原理
滾仰式半捷聯(lián)導(dǎo)引頭具有滾轉(zhuǎn)和俯仰兩個自由度,其光學(xué)系統(tǒng)安裝在穩(wěn)定平臺框架上,穩(wěn)定平臺內(nèi)外框架在各框架力矩電機驅(qū)動下可繞相應(yīng)框架軸轉(zhuǎn)動[11]。導(dǎo)引頭控制系統(tǒng)在設(shè)計時,首先根據(jù)穩(wěn)定平臺的外形尺寸和性能要求,制定系統(tǒng)的基本控制方案,然后選擇系統(tǒng)主要元器件,最后建立數(shù)學(xué)模型分析系統(tǒng)動態(tài)響應(yīng),并根據(jù)期望的性能指標設(shè)計調(diào)節(jié)器。穩(wěn)定平臺由臺體、傳動機構(gòu)、力矩電機、驅(qū)動功放、校正網(wǎng)絡(luò)、角度傳感器、角速度傳感器等構(gòu)成[12-13]。其控制回路多采用位置-速度雙回路控制系統(tǒng),其中位置回路主要用來提高控制系統(tǒng)的精度,速度回路主要用來減小控制系統(tǒng)的超調(diào)量,改善回路的動態(tài)性能,以滿足系統(tǒng)的穩(wěn)態(tài)和動態(tài)要求。滾仰式半捷聯(lián)導(dǎo)引頭控制原理框圖如圖1。
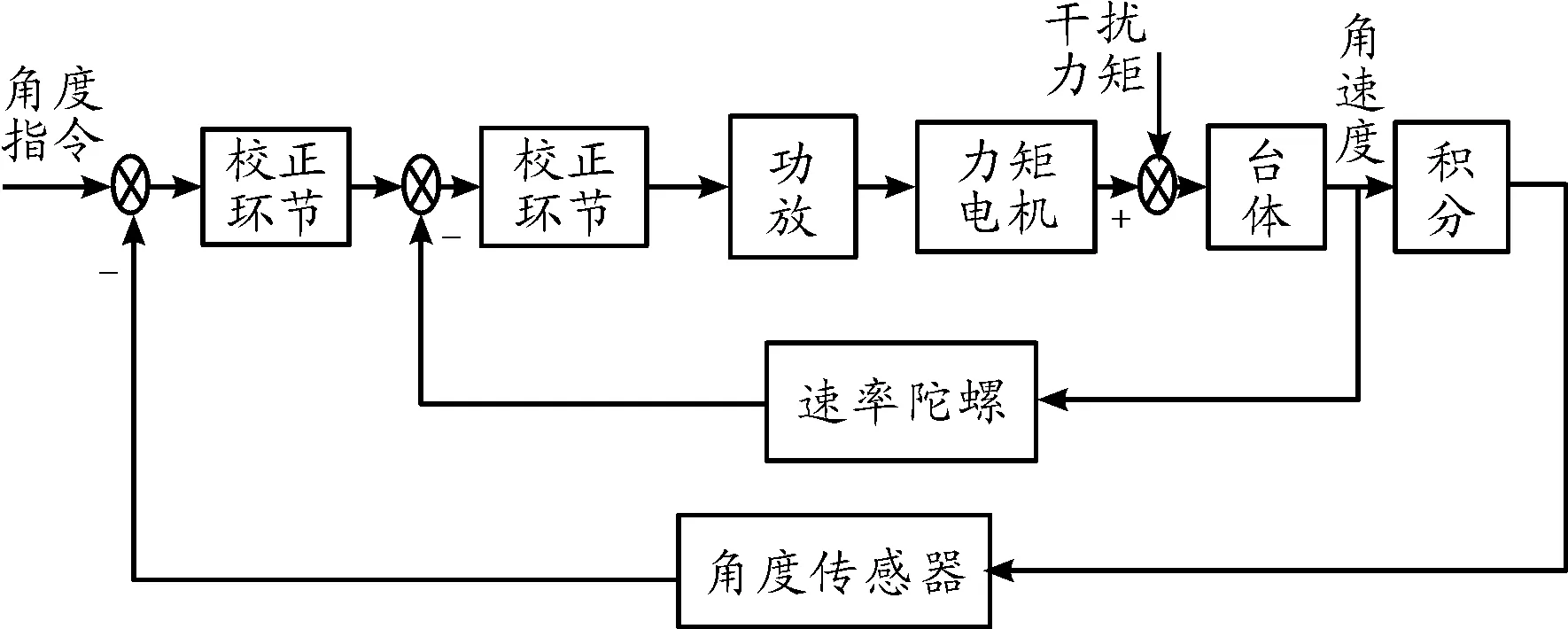
圖1 導(dǎo)引頭控制系統(tǒng)原理框圖
滾仰式半捷聯(lián)導(dǎo)引頭穩(wěn)定平臺的主要功能是保持導(dǎo)引頭光軸穩(wěn)定,隔離彈體擾動,對目標實現(xiàn)精確跟蹤。當彈體姿態(tài)劇烈變化或?qū)б^受到外界擾動時,圖像系統(tǒng)輸出的失調(diào)角有可能會出現(xiàn)跳動現(xiàn)象,進而影響導(dǎo)引頭跟蹤的穩(wěn)定性。為避免這種影響,導(dǎo)引頭控制系統(tǒng)應(yīng)該具有較高的跟蹤精度和穩(wěn)定精度、具有對目標的快速跟蹤能力,其控制器的設(shè)計和控制策略的選擇是實現(xiàn)導(dǎo)引頭功能的關(guān)鍵所在。同時為實現(xiàn)對目標的精確制導(dǎo),要求導(dǎo)引頭必須具備良好的控制性能以確保交會過程中對目標快速穩(wěn)定跟蹤。
3 基于卡爾曼濾波的導(dǎo)引頭控制
3.1 卡爾曼濾波原理
卡爾曼濾波算法中利用到了系統(tǒng)狀態(tài)方程、量測方程、測量誤差的統(tǒng)計特性和白噪聲激勵的統(tǒng)計特性等,卡爾曼濾波本質(zhì)是遞推無偏線性最小方差估計,估計結(jié)果在線性估計中精度最佳[10],下面簡單介紹下卡爾曼濾波原理。
設(shè)系統(tǒng)的狀態(tài)方程為
Xk=Φk,k-1Xk-1+Γk,k-1Wk-1
(1)
設(shè)系統(tǒng)的量測方程為
Zk=HkXk+Vk
(2)
其中:Xk為狀態(tài)向量,Xk-1為上一時刻的狀態(tài)向量,Φk,k-1為狀態(tài)轉(zhuǎn)移矩陣,Γk,k-1為過程噪聲輸入矩陣,Wk-1為過程噪聲序列,Zk為量測值,Hk為量測矩陣,Vk為測量噪聲序列。
若滿足式(1)和式(2)的線性隨機系統(tǒng)的過程噪聲和量測噪聲為高斯白噪聲且它們不相關(guān),則可得到下述卡爾曼濾波方程。
比較兩組的手術(shù)時間、術(shù)中出血量和手術(shù)費用。采用日本骨科協(xié)會評分(JOA評分)評估患者神經(jīng)功能,改善率計算方式如下:神經(jīng)功能改善率=(治療后JOA評分-治療前JOA評分)/(17-治療前評分)×100%。
1) 狀態(tài)一步預(yù)測方程:
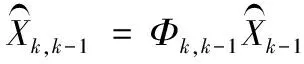
(3)

2) 一步預(yù)測均方誤差:
(4)
其中:Pk,k-1為狀態(tài)預(yù)測的均方誤差矩陣,Qk-1為過程噪聲方差。
3) 濾波增益:

(5)
其中Rk為量測噪聲方差陣。
4) 狀態(tài)估計方程:

(6)
Pk=(I-KkHk)Pk/k-1
(7)
式(3)~式(7)即為離散形式的卡爾曼濾波基本方程,該濾波方法能夠在線性高斯模型條件下,對目標狀態(tài)做出最優(yōu)估計[10]。
3.2 導(dǎo)引頭狀態(tài)方程與量測模型


圖2 慣性坐標系和視線坐標系的關(guān)系


(8)
假設(shè)目標為常加速度運動模型,把目標的加加速度作為隨機白噪聲處理,可得:

(9)
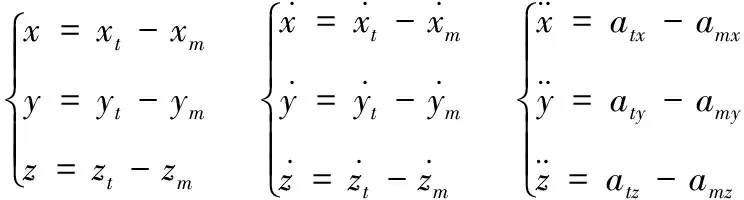
wx、wy、wz為高斯白噪聲,則導(dǎo)引頭的狀態(tài)方程可表示為

(10)
由于導(dǎo)彈自身加速度可量測,式(10)中導(dǎo)彈加速度am為已知輸入量。因此在慣性坐標系下導(dǎo)引頭的狀態(tài)方程是線性的,其中:

由圖2慣性坐標系與視線坐標系的位置關(guān)系可得:

(11)
根據(jù)導(dǎo)引頭框架角、圖像失調(diào)角等可以得到彈目視線角,因此導(dǎo)引頭量測方程為
(12)
根據(jù)導(dǎo)引頭狀態(tài)方程和量測方程,可采用卡爾曼濾波器進行目標運動狀態(tài)估計,實現(xiàn)對半捷聯(lián)導(dǎo)引頭的穩(wěn)定控制與快速跟蹤。
4 仿真分析
根據(jù)滾仰式半捷聯(lián)導(dǎo)引頭穩(wěn)定與跟蹤原理,采用基于目標運動狀態(tài)估計的卡爾曼濾波方法對導(dǎo)引頭進行控制,導(dǎo)引頭控制仿真模型如圖3所示。其中PID控制器的參數(shù)設(shè)置為kp=10、ki=1、kd=1,取采樣時間為1 ms。設(shè)導(dǎo)引頭控制干擾信號其均值為0度,方差為0.02。設(shè)導(dǎo)引頭探測器測量值的偏差其均值為0度,方差為0.02。
為了評估半捷聯(lián)導(dǎo)引頭采用卡爾曼濾波方法對運動目標的跟蹤效果,給系統(tǒng)輸入正弦激勵信號u=sin(2πt)。理想信號及帶有噪聲的信號如圖4所示、理想信號及濾波后的信號如圖5所示。從圖5中可以看到,卡爾曼濾波方法對控制干擾和測量噪聲具有良好的濾波作用,導(dǎo)引頭控制系統(tǒng)的響應(yīng)結(jié)果很好的復(fù)現(xiàn)了期望的軌跡,控制誤差接近于0。
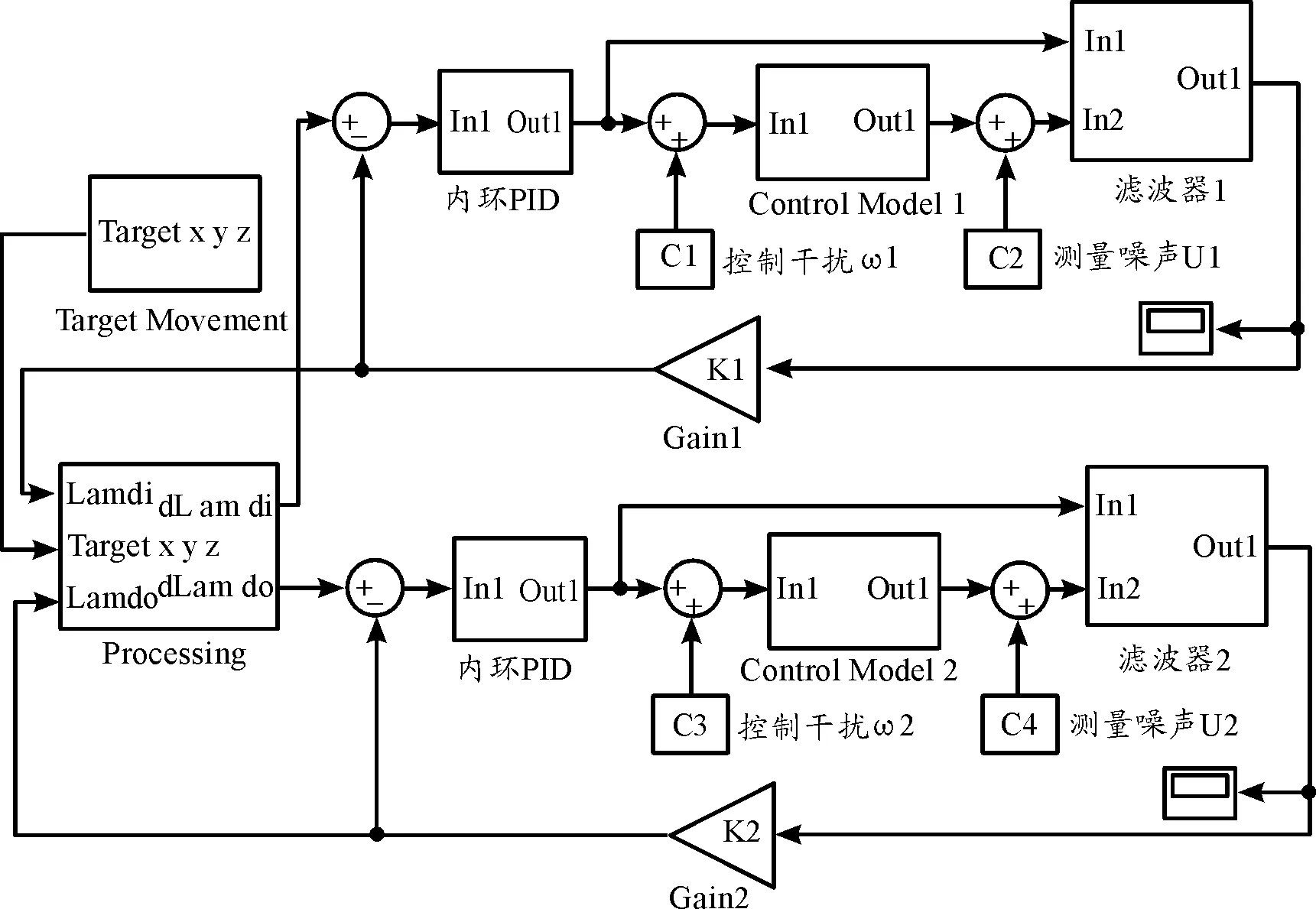
圖3 滾仰式半捷聯(lián)導(dǎo)引頭控制仿真模型示意圖

圖4 理想信號及帶有噪聲的信號

圖5 理想信號及濾波后的信號
從以上仿真結(jié)果可以看出:基于目標運動狀態(tài)估計的卡爾曼濾波方法應(yīng)用于半捷聯(lián)導(dǎo)引頭控制系統(tǒng),對控制干擾和測量噪聲具有良好的濾波作用,能夠有效提高導(dǎo)引頭控制系統(tǒng)的魯棒性。
為了進一步驗證該控制算法的性能,在半捷聯(lián)導(dǎo)引頭穩(wěn)定與跟蹤一體化仿真模型中,假設(shè)目標的運動方程為x(t)=8 000,y(t)=2 000+300*sin(0.5t),z(t)=2 000+300*cos(0.5t)。設(shè)導(dǎo)引頭控制干擾信號其均值為0度,方差為0.02。設(shè)導(dǎo)引頭探測器測量值的偏差其均值為0度,方差為0.02的白噪聲。考察在噪聲作用下滾仰式半捷聯(lián)導(dǎo)引頭對運動目標的跟蹤性能。由圖6、圖7可知:在干擾信號和測量噪聲作用下滾仰式半捷聯(lián)導(dǎo)引頭可始終保持對目標的穩(wěn)定跟蹤,跟蹤誤差可控制在2個像素以內(nèi)。運動目標在滾仰式半捷聯(lián)導(dǎo)引頭瞬時視場內(nèi)的軌跡如圖8所示,可以看出目標始終在導(dǎo)引頭瞬時視場內(nèi)。基于目標運動狀態(tài)估計的卡爾曼濾波方法能夠使?jié)L仰式半捷聯(lián)導(dǎo)引頭在擾動和噪聲作用下保持對運動目標持續(xù)穩(wěn)定的跟蹤。
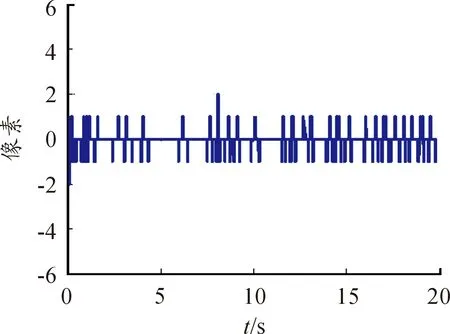
圖6 X向?qū)б^跟蹤誤差

圖8 導(dǎo)引頭瞬時視場中目標運動軌跡
5 結(jié)論
本文提出的基于目標運動狀態(tài)估計的卡爾曼濾波方法應(yīng)用于半捷聯(lián)導(dǎo)引頭控制,使導(dǎo)引頭對控制干擾和測量噪聲具有良好的濾波作用,能夠有效提高導(dǎo)引頭控制系統(tǒng)的魯棒性。仿真結(jié)果表明,采用基于目標運動狀態(tài)估計的卡爾曼濾波方法應(yīng)用于導(dǎo)引頭控制,能夠使導(dǎo)引頭控制回路的自適應(yīng)能力得到提高,能夠使導(dǎo)引頭在干擾和噪聲作用下實現(xiàn)對運動目標的穩(wěn)定跟蹤,為滾仰式半捷聯(lián)導(dǎo)引頭的控制系統(tǒng)設(shè)計提供參考。
猜你喜歡
測控技術(shù)(2018年11期)2018-12-07 05:49:38
測控技術(shù)(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學(xué)學(xué)報(2017年9期)2017-12-18 07:12:25
中國慣性技術(shù)學(xué)報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(shù)(2016年9期)2016-02-27 09:05:39
江蘇科技大學(xué)學(xué)報(自然科學(xué)版)(2015年4期)2015-12-17 12:42:50
電源技術(shù)(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36