架控制動系統空氣防滑控制策略研究*
2019-11-11 08:35:24齊政亮曹宏發
鐵道機車車輛 2019年5期
關鍵詞:控制策略
齊政亮, 周 軍, 曹宏發
(1 北京縱橫機電科技有限公司, 北京 100094;2 中國鐵道科學研究院集團有限公司 機車車輛研究所, 北京 100081)
制動系統直接影響列車制動距離,關乎到車輛的行車安全,是列車安全運營的重要前提。目前,制動系統依據其作用效果,有車控制動系統和架控制動系統兩種型式。車控系統作用于單輛車,架控系統作用于單個轉向架[1-2]。對于此兩種制動系統,車輪防滑保護WSP(Wheel Slide Protection)都具有不可或缺的作用,其不僅能夠在輪軌黏著突然降低時通過減少制動力的方式以防止車輪出現擦傷甚至抱死,而且能最大程度地利用可用黏著以使制動距離達到最短[3-4]。相對于車控制動系統分別具有制動閥和防滑閥,架控制動系統將制動閥和防滑閥合二為一,無獨立防滑閥,雖減少了零部件,但對WSP提出新的要求,此時如何有效地實施防滑保護控制,將關乎到架控制動系統的運行安全[3]。
在全面分析北京縱橫機電科技有限公司的DK15架控制動系統平臺功能結構的基礎上,吸收中國標準動車組制動系統(車控系統)防滑保護控制的開發和運用經驗,設計了一種架控制動系統空氣防滑控制策略。該控制策略能有效抑制輪對滑行,防止車輪出現擦傷甚至抱死,并能充分利用黏著以使制動距離達到最短,仿真試驗臺測試和實車型式試驗的結果已驗證了該控制策略完全滿足架控制動系統對防滑控制的要求。
1 架控制動系統結構分析
DK15架控制動系統由兩部分組成:空氣制動控制單元(Pneumatic Braking Control Unit,PBCU)和電子制動控制單元(Electronic Braking Control Unit,EBCU),如圖1所示(上部為EBCU,下部為PBCU)。PB-CU的信號載體是空氣壓力,EBCU的信號載體是電,包括電壓、電流、總線通信等,二者協同完成制動控制[3]。
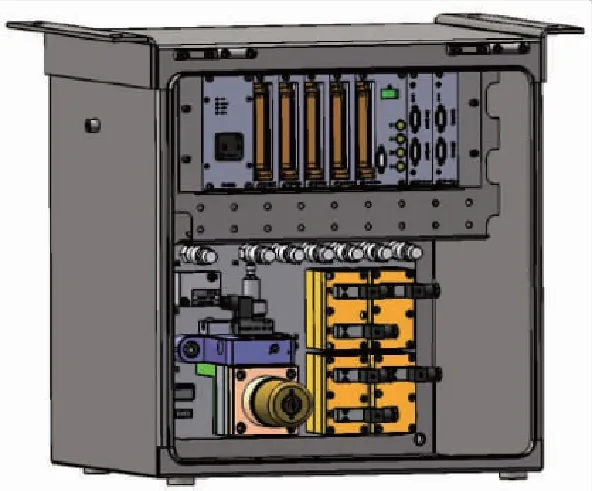
圖1 DK15架控制動控制系統結構模型
1.1 空氣制動控制單元PBCU
空氣制動控制單元PBCU,如圖2所示,主要由空重車調整模塊、遠程緩解模塊、制動控制模塊、連通模塊以及傳感器和壓力測點模塊等5部分組成[3]。其中,制動控制模塊由兩組結構和功能都完全相同的制動閥組成,按不同制動指令控制得到相應的目標制動缸壓力,還用于在滑行激活時對單軸制動缸壓力進行獨立控制。連通模塊由電磁閥A4和氣動閥B5構成,用于在氣路上連通或隔斷兩軸制動缸的壓力輸出;滑行激活時,需要隔斷兩軸制動缸壓力,實現單軸獨立防滑控制。
1.2 電子制動控制單元EBCU
電子制動控制單元EBCU,是為了滿足制動系統控制功能需求而設計開發的一種嵌入式電子控制單元。其具有多種形式的外部信號接口,可實現與PBCU、車輛、ATP等的信息交互:通過模擬量輸入接口采集空氣壓力信號,通過頻率量輸入接口采集車軸轉速,通過數字量輸入接口采集列車線指令,通過功率PWM輸出接口驅動電磁閥動作,通過繼電器接口向車輛反饋制動系統狀態。如圖3所示[3]。
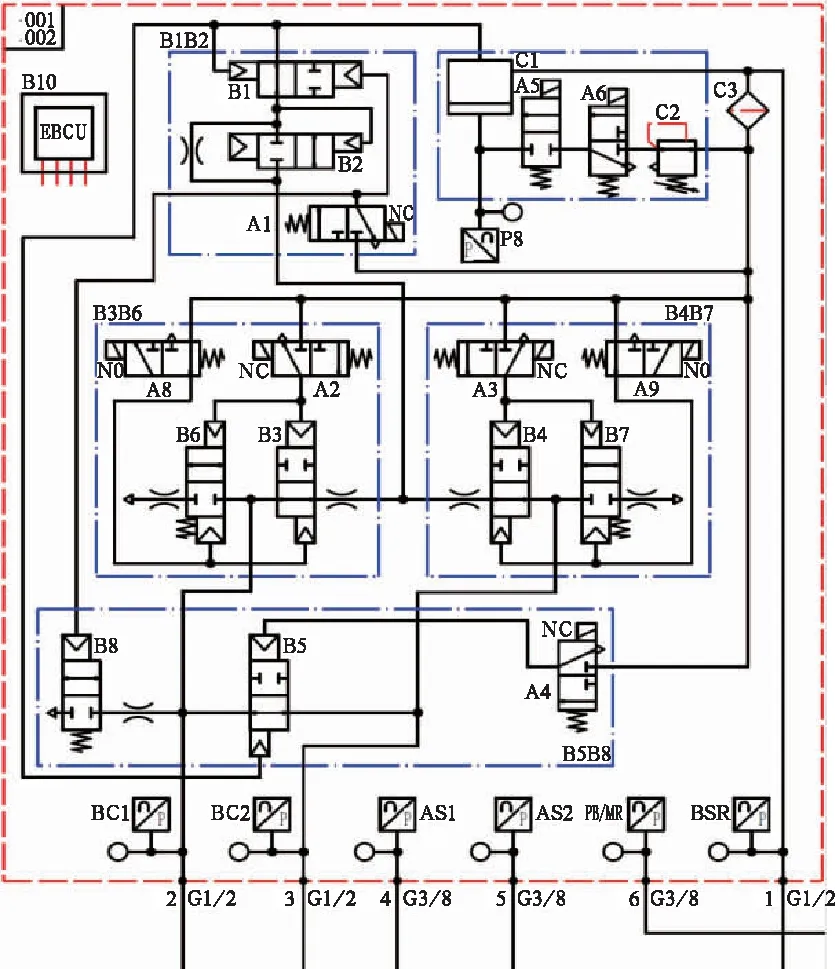
圖2 DK15的PBCU氣路圖
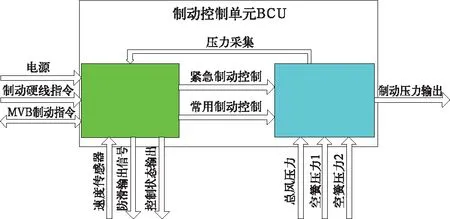
圖3 DK15的EBCU接口示意圖
2 架控制動系統防滑控制功能
2.1 功能概述
從系統功能需求分析,在車控制動系統中,防滑閥(WSP閥)和制動閥(EP閥)相互獨立;滑行未激活時,防滑閥始終保持為充風狀態。而架控制動系統將WSP閥和EP閥合二為一,無獨立WSP閥,結構更加緊湊、功能更加集成[3]。結構影響控制,因此,架控制動系統防滑控制具有如下特點:
(1)當滑行未激活時,防滑保護控制功能不起作用, EBCU正常制動功能控制EP/WSP閥進行充風、排風、保壓等動作,使缸壓達到目標壓力值;
(2)當滑行激活時,防滑保護控制功能起作用,EBCU依據滑行判斷邏輯,首先斷開連通閥,然后控制相應軸的EP/WSP閥進行單軸保壓、排風、充風等動作。當滑行恢復后,必須將軸缸壓恢復至實時缸壓目標值,而不是使防滑閥處于充風狀態(持續充風會將缸壓充到緊急預控壓力,從而造成車輛處于緊急制動狀態)。對于未滑行軸,則需實時控制該軸缸壓達到缸壓目標值。
2.2 防滑控制系統結構
架控防滑控制系統主要由集成在EBCU中的防滑控制器、防滑閥(與制動閥為同一套閥)、連通閥、速度傳感器、壓力傳感器等組成[5-6]。防滑控制器實時采集速度傳感器脈沖信號、壓力傳感器信號及車輛速度等,并計算出1、2軸速度和1、2軸缸壓,如圖4所示。防滑控制器根據1、2軸速度計算出軸加減速度,利用滑行判據[7]準確判斷出1、2軸所處滑行狀態,當任一軸滑行激活時,控制斷開連通閥以實現軸獨立防滑控制。當判斷任一軸處于滑行恢復期,則需結合該軸壓力傳感器將該軸缸壓恢復到缸壓目標值。
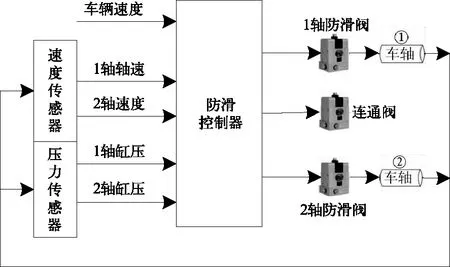
圖4 DK15架控防滑控制系統結構
2.3 滑行判斷原理
目前現有的防滑控制系統分別選用了多種條件的不同組合構成判據進行"滑行"的判斷,主要條件有速度差、減速度、減速度微分、滑移率等,判據不盡相同,但最終目的都是為了“在不造成車輪擦輪的情況下,充分利用輪軌間黏著”。文中設計的架控制動系統防滑控制策略吸收了中國標準動車組制動系統防滑控制開發和運用經驗,設計了一種由速度差和減速度共同構成復合矩陣的滑行判斷策略[7]。根據不同的速度差和減速度,判斷軸滑行狀態有“全排(即持續排風)”、“階排(即脈沖式排風)”、“保壓”、“階充(即脈沖式充風)”、“全充(即持續充風)”等[7]。
但相對于車控制動系統,架控制動系統在速度恢復期,則必須結合該軸缸壓狀態、缸壓目標值進行閉環控制,即滑行恢復后,需將各軸缸壓恢復到缸壓目標值,這樣才能保證制動力不會出現過大或不足[8]。
2.4 防滑控制設計
基于以上分析,架控制動系統的防滑控制器實時采集1、2軸速度及車輛速度,根據滑行判斷原理,判定各軸所處的滑行狀態。當車輪處于滑行加劇期或穩定期,即“階排”、“全排”、“保壓”狀態時,防滑控制器直接控制連通閥斷開、對應軸的防滑閥進行動作,以減少制動力或保持制動力;當車輪處于滑行恢復期,即“階充”、“全充”狀態時,防滑控制器需結合該軸缸壓、缸壓目標值進行閉環控制,以防止壓力充到緊急預控壓力。如圖5所示。
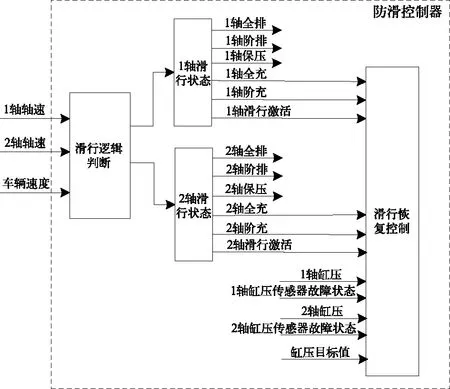
圖5 防滑控制設計
在滑行恢復控制過程中,需要綜合考慮實時缸壓目標值、實時缸壓大小、缸壓傳感器故障狀態,如圖6所示。主要有以下考慮:
(1)當僅有一軸出現滑行時,需要根據缸壓目標值實時將未滑行軸的缸壓控制到目標值,這樣才不會造成制動力損失;
(2)若在“階充”、“全充”狀態時,恰好該軸缸壓傳感器出現故障,此時無法進行閉環控制,需將其控制在保壓狀態,等待滑行恢復。
3 測試驗證
為了檢驗文中設計的架控制動系統空氣防滑控制策略是否滿足要求,功能測試需在仿真測試試驗臺和實車上進行全面驗證。實測結果表明,該控制策略不僅能夠有效地進行車輪防滑保護,而且在滑行恢復后能夠快速地將各軸缸壓控制到缸壓目標值,滿足了架控系統對防滑控制的要求。
3.1 仿真測試試驗臺
動車組制動系統軟件集成測試平臺主要用于對列車單車或多車的EBCU進行制動過程仿真和參數測試,進一步實現對EBCU嵌入式軟件的測試驗證。整個仿真測試過程由仿真回路和仿真節點組成。為了虛擬實現列車制動環境、模擬EBCU外圍執行器件和制動系統的智能測試等應用需求,該平臺主要由列車通訊回路、EBCU負載回路和仿真設備通訊回路組成。列車通訊回路主要指列車制動環境模擬設備(主仿真節點)和單車的制動系統(EBCU節點)以及TCU、CCU等其他列車信息節點的通訊回路。EBCU負載回路主要指單車制動環境模擬設備板卡(負載仿真節點)和單車制動系統(EBCU節點)板卡之間的信號交聯。仿真設備通訊回路主要指測試服務系統(測試計算機)與主仿真節點、負載仿真節點之間的通訊回路[3]。
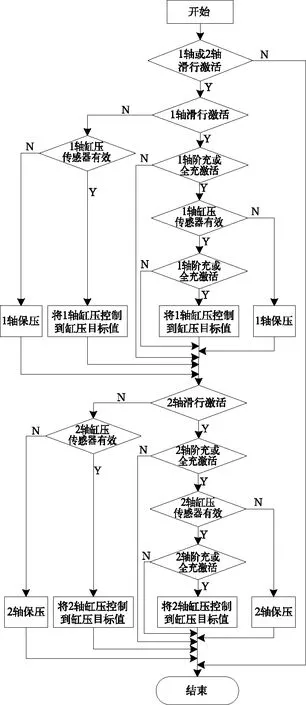
圖6 滑行恢復控制設計
3.2 仿真驗證
通過軟件集成測試試驗臺模擬車輪滑行、缸壓目標值變化、缸壓傳感器故障狀態等以全面測試防滑保護和缸壓恢復的情況,如表1所示。
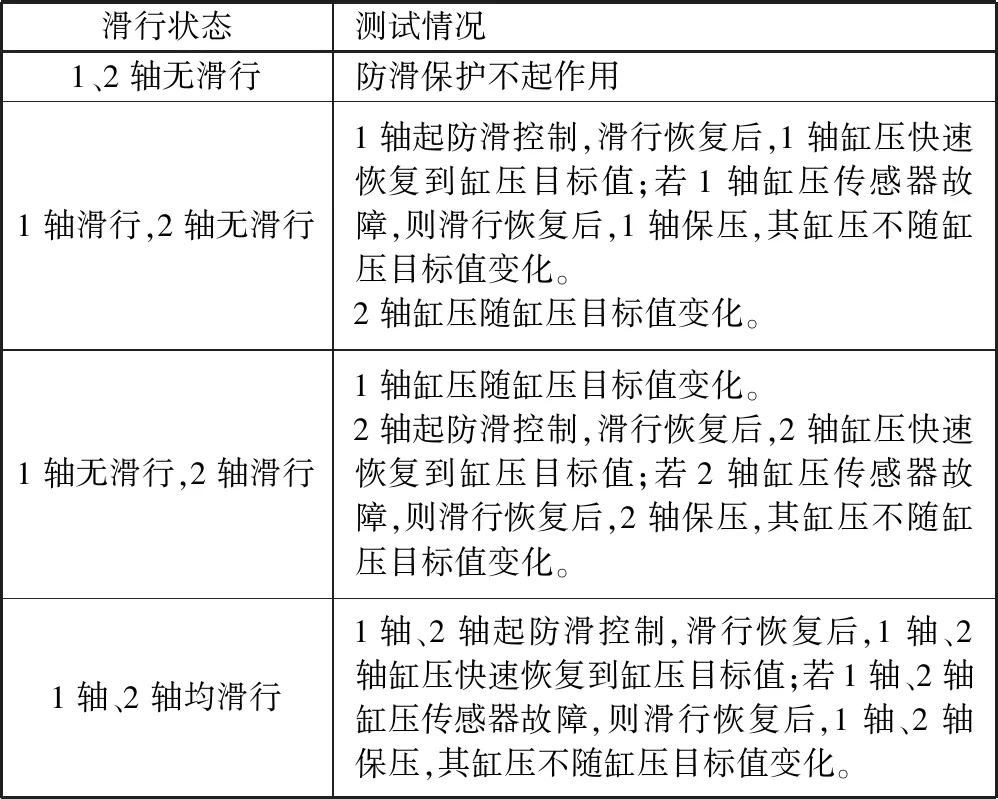
表1 防滑保護和缸壓恢復測試驗證
測試結果表明,該防滑控制策略滿足設計要求。
3.3 實車試驗
文中設計的架控制動系統空氣防滑控制策略已在長株潭城際動車組和溫州市域動車組項目中得到了批量應用,如圖7所示為溫州市域動車組和架控制動控制系統。

圖7 溫州市域動車組和架控制動控制系統
溫州市域動車組在東郊環鐵進行了現車防滑型式試驗,以80 km/h純空氣最大常用制動防滑試驗為例,如圖8所示。當發生滑行時,防滑控制系統能夠有效地抑制輪對滑行,使輪對速度得以快速恢復;當黏著改善,輪對滑行恢復時,防滑控制系統控制制動缸壓力迅速恢復到缸壓目標值。防滑試驗過程中,未出現軸抱死現象,試驗結果滿足速度差和制動距離標準要求,驗證了該控制策略的有效性和可靠性。
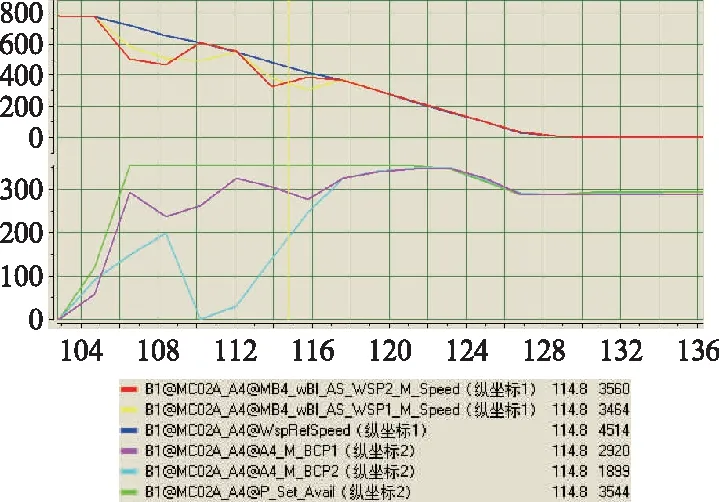
圖8 溫州市域動車組80 km/h最大常用制動防滑試驗
4 結 論
在全面分析DK15架控制動系統平臺功能結構的基礎上,吸收中國標準動車組制動系統防滑控制開發和運用經驗,設計了一種架控制動系統空氣防滑控制策略。在測試試驗臺和實車上的試驗結果表明,該控制策略能夠有效抑制輪對滑行,防止車輪擦傷,并能充分利用黏著以縮短制動距離,滿足了架控制動系統對防滑控制的要求,為自主設計架控制動系統的規模應用提供了理論支撐和技術保障。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36