基于非結構嵌套網格的低空大動壓頭罩分離數值模擬
2019-11-12 09:06:14馬友林
導彈與航天運載技術 2019年5期
袁 亞,李 冬,馬友林,陳 皓,王 亮
(中國運載火箭技術研究院,北京,100076)
0 引 言
頭罩分離包含剛體與流體耦合的相對運動過程,一般采用風洞實驗、飛行試驗、數值模擬等方法對類似的多體運動問題進行研究。風洞實驗費用高、周期長、相似律無法同時滿足等問題[1,2];飛行試驗代價昂貴,試驗復雜,一般也僅作為最后驗證手段。隨著計算流體力學的迅猛發展,使用數值模擬方法對多體運動的研究日趨成熟。Cavallo P等[3]利用非結構動網格技術對某再入導彈的頭罩分離過程進行了數值模擬,計算了頭罩旋轉分離脫鉤前后的運動軌跡,分析兩瓣頭罩的分離同步性和分離安全;王巍[4]對包含邊界運動問題進行數值計算研究,發展了網格變形和局部網格重構技術,并對低空大動壓頭罩分離進行模擬,考察了頭罩分離瓣數、質量特性、氣動特性對分離軌跡的影響,初步建立起頭罩安全分離的準則;劉振等[5]利用結構嵌套網格技術對大氣層內頭罩分離進行數值模擬,給出了分離過程中激波干擾引起的紅外窗口位置的壓強振蕩情況;趙曉慧[6]利用結構嵌套網格技術模擬了整體式頭罩分離全過程,模擬了作動器-質心偏置方式和非對稱小火箭方式對分離過程的影響,并與基于定常參數的六自由度彈道仿真結果對比分析,定性地指出部件干擾和非定常效應對分離的影響。
可以看出,多體運動數值模擬可根據使用的網格不同而分為動網格技術、嵌套網格技術[7]、動態自適應直角坐標網格技術等。本文利用多面體非結構網格配合使用動態嵌套網格技術,模擬某飛行器頭罩低空大動壓“平推—對開”無鉸鏈分離過程。
1 數值計算方法
1.1 N-S控制方程及離散方法
積分形式的N-S控制方程通過以下方程給出:

1.2 6-DoF彈道方程
對于剛體運動,其質心和繞質心運動方程分別通過以下方程給出:
式中 m為剛體質量;F為作用在剛體的合外力;V為質心的速度矢量;M為轉動慣量張量;為剛體的角速度矢量;N為作用在剛體上合力矩。
1.3 動態多面體網格嵌套技術
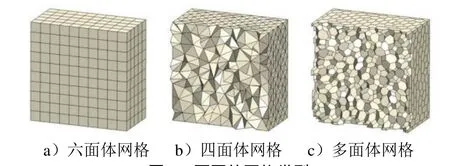
圖1為不同的網格類型圖。多面體網格有更多的相鄰單元(見圖1c),梯度的計算更準確;多面體對幾何的變形沒有四面體敏感,可以自動融合、分裂,或者增加新的點、線、面,所以具有對復雜外形的模擬能力;同時在相同參數設置下,其網格數量僅為四面體網格數量的五分之一,具有更好的收斂性和更小的網格依賴性,能大大降低用戶的硬件要求和模擬的計算時間。
嵌套網格系統一般含有一套背景網格和一套或多套子網格,在進行流場計算之前需要進行網格挖洞、宿主單元的搜尋、網格裝配等過程[12]。嵌套網格裝配完成后,對嵌套的網格指定主動或被動的運動方式,求解器將按照指定運動方式求解動態運動過程。
2 動態多面體網格嵌套技術驗證
選擇機翼/掛架/帶舵外掛物模型(Wing/Pylon/Finned-Store,WPFS)對多面體非結構動態嵌套網格技術進行數值驗證。阿諾德工程發展中心于1990年完成該模型的風洞軌跡捕獲試驗,擁有翔實的實驗數據可供對比分析,具有較高的可信度。計算條件:Ma=0.95,H=8 km,飛行攻角為 0°,模型外形和分離彈射力詳細設置見參考文獻[13],圖2給出了WPFS嵌套網格系統。
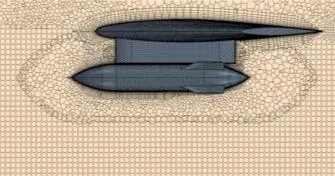
圖2 WPFS嵌套網格示意Fig.2 Overset Unstructured Grid of WPFS
圖3 為導彈質心位移和速度的數值模擬結果與風洞實驗的對比。由圖3可看出,計算結果與實驗值吻合較好,計算精度滿足工程需求,可采用相關技術對包含相對運動的頭罩分離問題進行數值模擬。

圖3 導彈質心位移和速度數值模擬曲線Fig.3 Displacement and Velocity of Center of Mass
3 仿真結果及分析
3.1 頭罩分離網格系統
圖4為頭罩分離的背景網格(飛行器)和運動嵌套網格(頭罩)示意。飛行器背景網格單元924736個,頭罩嵌套網格區域網格單元621430個,網格第1層高度0.0005 mm,棱柱層15層,棱柱層網格高度設置能夠使物面Y+在50~200。結合分離條件、網格尺寸、計算精度、計算開銷并參考X-43A分離條件[14]等因素綜合選取時間步長Δt為0.00005 s,分離條件如表1所示。
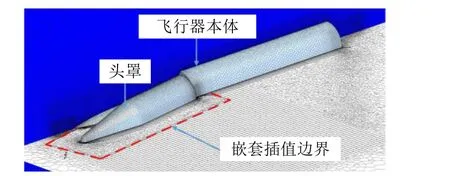
圖4 頭罩分離嵌套網格系統Fig.4 Schematic Diagram of Shroud Separation Grids

表1 頭罩分離條件Tab.1 Calculation Conditions of Shroud Separating
3.2 分離沖量裝置設計
解鎖后分離沖量由4個分離彈簧提供,其定義如下:

式中Fi為作用力;k為分離彈簧剛度;x0為彈簧初始壓縮量;zi為作用力行程。
圖5和表2為頭罩分離力的設置。

圖5 頭罩分離力設置Fig.5 Schematic Diagram of Shroud Separating
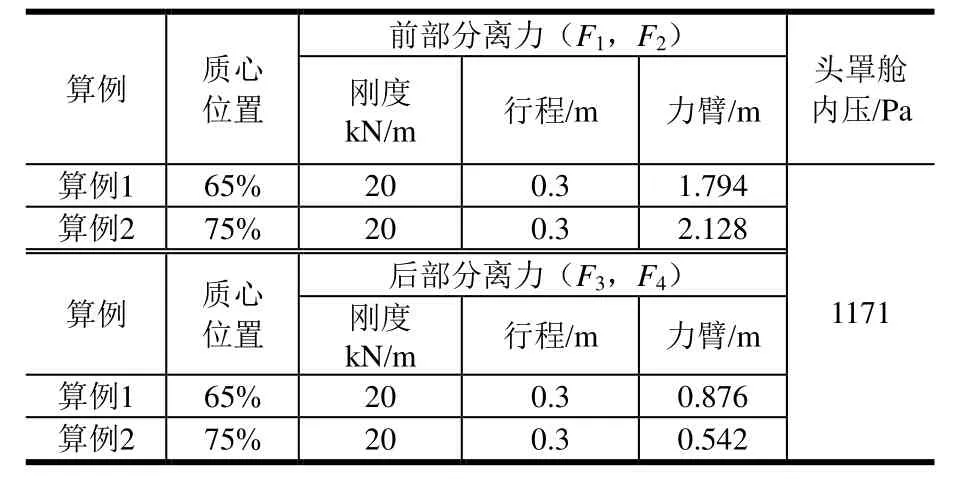
表2 分離力的設置Tab.2 Separation Force Setting of Shroud Separating
3.3 頭罩分離數值模擬
3.3.1 頭罩分離運動特性
圖6為算例1頭罩分離軌跡。頭罩初始階段主要受Z方向分離力驅動,并沿Z方向快速遠離飛行器本體。但由于前后分離力的力臂不同,將產生大小和正負不一的力矩,前部分離力矩利于頭罩旋轉分離,后部分離力矩阻礙頭罩分離,分離力結束后頭罩并未迅速打開,頭罩外側迎著來流,高速來流阻礙頭罩Z向平移和繞Y軸旋轉分離,頭罩在分離后期出現“內翻”的運動形態使頭罩與飛行器發生碰撞,頭罩分離失敗。
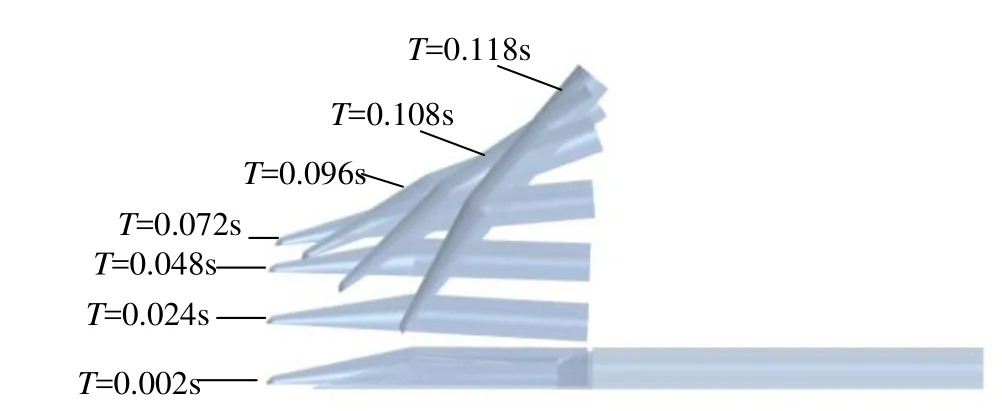
圖6 算例1頭罩運動軌跡Fig.6 Trajectory of Shroud in Case1
在算例2中將頭罩質心后移10%,保持前后分離力的作用點位置和大小不變,相當于同時增加了前部分離力(F1,F2)的力臂和減小了后部分離力(F3,F4)的力臂。
算例2頭罩分離軌跡和動態特性曲線如圖7、圖8所示。頭罩質心后移的方法能使頭罩安全分離,頭罩在分離力結束時的張角和角速度分別增加到0.094 rad和5.9 rad/s,前部分離力(F1,F2)有利于“外翻”旋轉的效應加強,后部分離力(F3,F4)阻礙“外翻”旋轉效應被明顯減弱,主動力結束后頭罩能夠持續旋轉使頭罩內側正對來流,利于頭罩旋轉和平移分離。
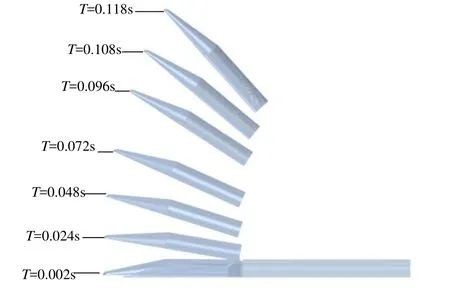
圖7 算例2頭罩運動軌跡Fig.7 Trajectory of Shroud in Case2
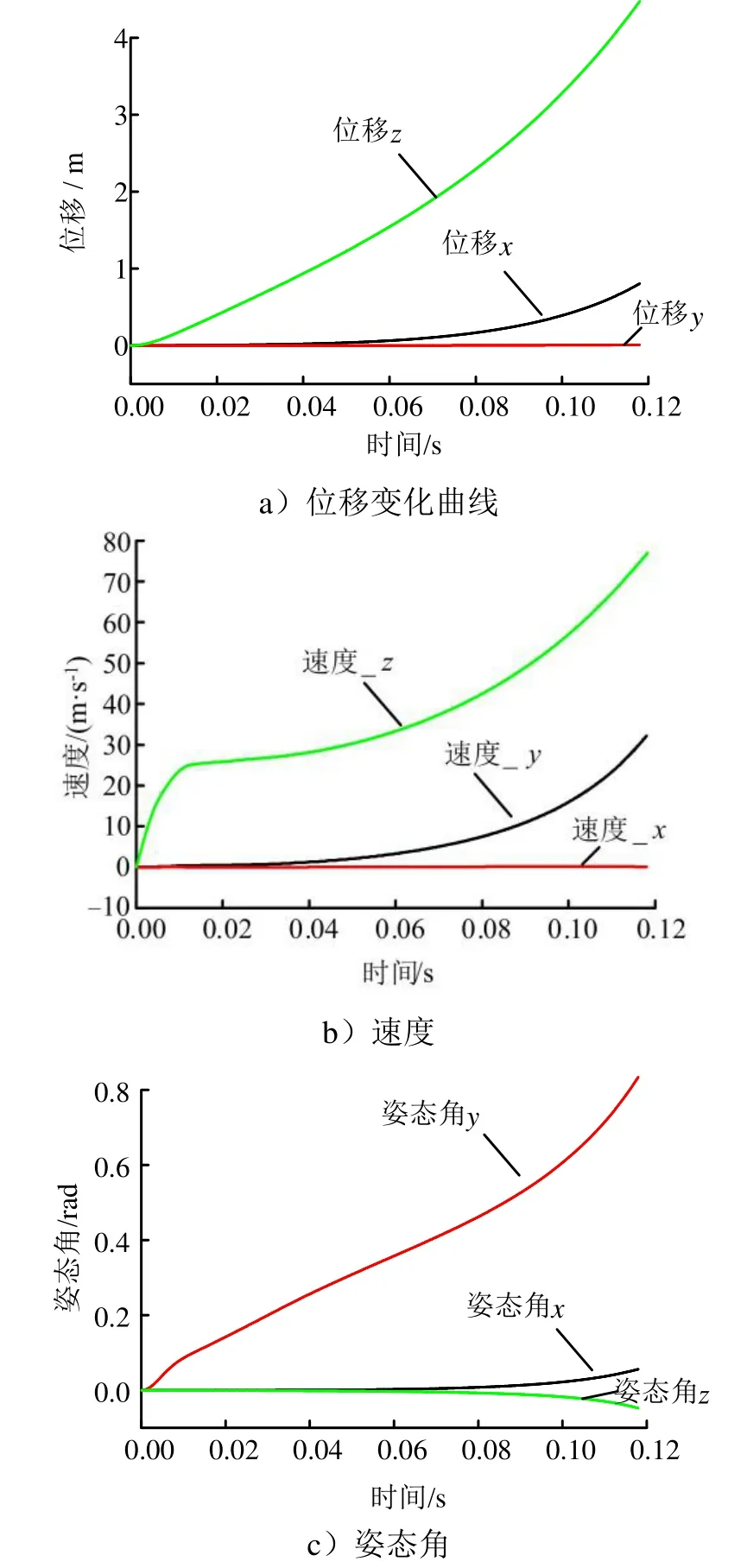
圖8 算例2頭罩運動軌跡及運動學參數曲線Fig.8 Kinematic Parameters of Shroud in Case2
3.3.2 頭罩分離動態流場特性
圖9給出了算例2頭罩氣動力變化過程。由圖9可知在分離初期頭罩距離飛行器本體位置較近,頭罩氣動力受飛行器本體干擾嚴重,出現一定的振蕩。
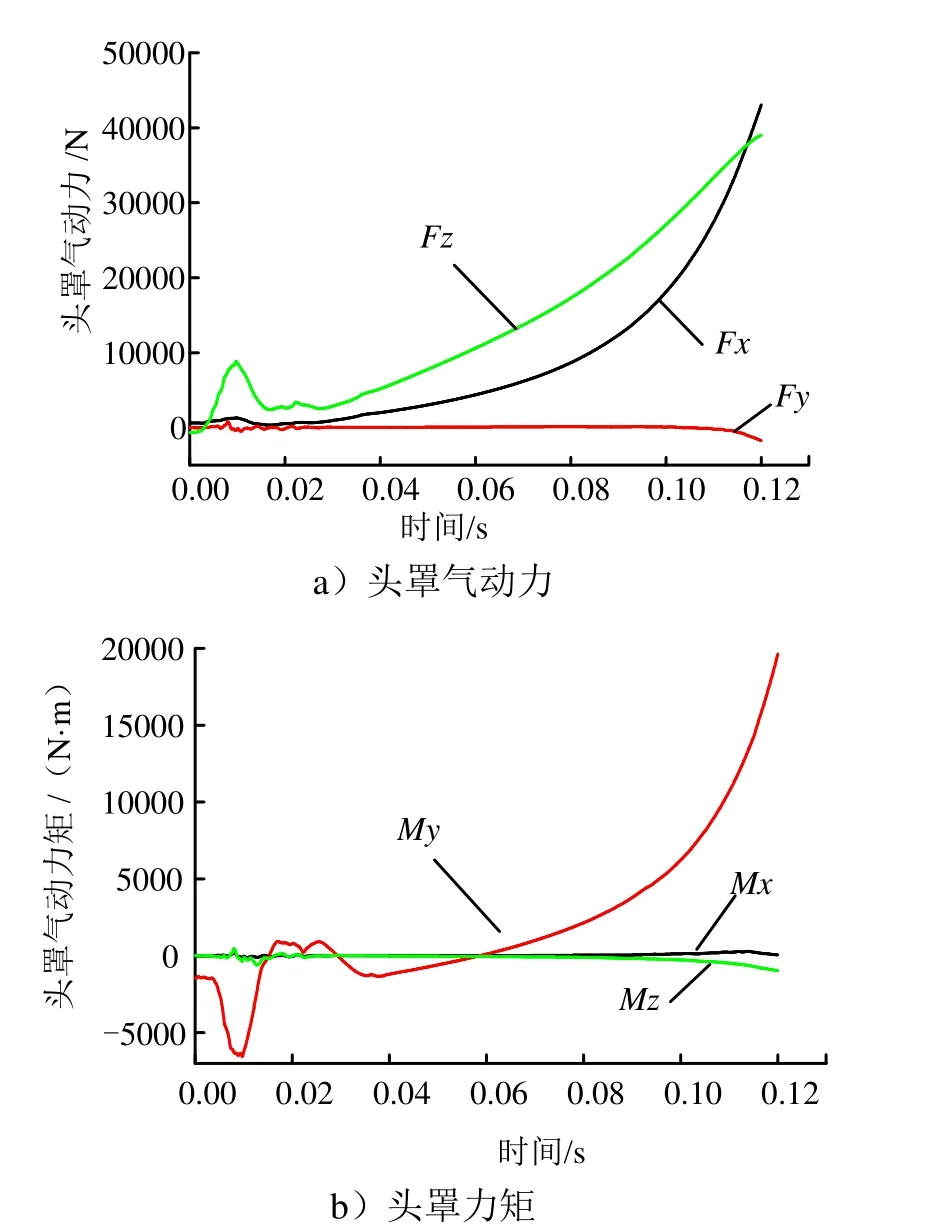
圖9 算例2頭罩氣動力變化曲線Fig.9 Shroud Aerodynamic of Shroud in Case2
頭罩分離動態流場變化過程如圖10所示。由圖10可以看出分析頭罩氣動力變化和流場結構的形成以及演變發展。
a)0~0.012 s:頭罩初始流場變化復雜。在頭罩尾部內側和頭罩前部的外側均存在局部高壓區,前部的高壓區來源于頭部弓形激波,頭罩后部內側高壓區則是因為高速來流進入頭罩后無法及時從尾部排出,在頭罩尾部柱段與飛行器形成的狹小縫隙內滯止形成局部的高壓區,在內外兩側高壓氣動力作用下,頭罩產生繞阻礙頭罩旋轉分離的力矩。
b)0.012~0.016 s:隨著頭罩的平移運動,頭罩與飛行器之間的間隙增加,尾部高壓得到釋放,從圖10中T=0.016 s時的流場圖可看出尾端內表面的局部高壓區已基本消失,頭罩的氣動力 Fz逐漸減小,力矩 My也逐漸減小(負值變大),根據頭罩氣動力及流場變化情況,可以明顯看出氣流在頭罩中的“填充—滯止—泄流”的過程。
c)0.016~0.024 s:頭罩平穩的平移和旋轉分離。
d)0.024~0.036 s:隨著旋轉張角的增加,頭罩后部圓柱段與來流產生一定的夾角并形成斜激波(圖10中 T=0.036 s),斜激波位于頭罩內側圓錐與圓柱對接處,其強度隨著頭罩分離張角的增加逐漸增加,使頭罩側向氣動力增加,同樣該激波位置靠后,氣動力的作用點也較為靠后,使頭罩繞質心的力矩逐漸減小到負值,阻礙頭罩的“外翻”旋轉分離。
e)0.036 s以后頭罩Fz和My均持續增大,在分離后期頭罩旋轉分離張角逐漸增加到垂直于來流的角度,在錐柱段形成脫體的弓形激波,頭罩在氣動力作用下沿X方向和Z方向快速分離。
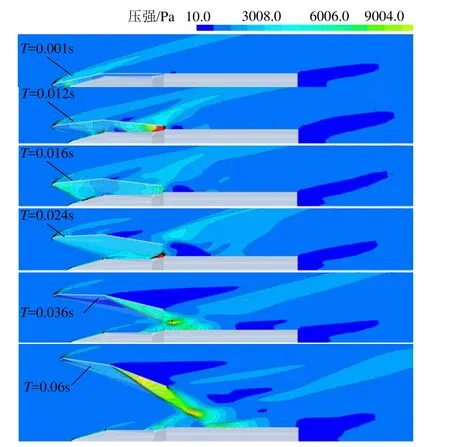
圖10 算例2頭罩分離動態流場Fig.10 Dynamic Flow Field in Case2
4 結 論
本文采用動態嵌套網格技術耦合求解雷諾平均N-S和6-DoF方程,模擬頭罩從閉合到分離的全過程,得出以下結論:
a)數值模擬表明本文設計的頭罩分離沖量大小、作用力行程、質心位置等總體參數合理可行;
b)質心后移的改進分離措施能使頭罩安全的外翻旋轉分離,頭罩不會被氣流重新壓向飛行器;
c)氣流在頭罩和飛行器本體之間的間隙中會表現出“填充—滯止—泄流”的流動現象,該過程決定頭罩氣動力變化規律。
本文數值模擬了頭罩在氣動力、重力、分離力作用下的動態分離過程,得到清晰直觀的分離軌跡和運動特性,驗證了質心后移改進分離措施的有效性,研究了運動部件相對位置的變化帶來復雜動態流場演變過程,能為分離方案的總體設計提供精細化的輸入條件,具有較高的工程應用價值。
