跨坐式單軌道岔電氣故障診斷系統方案設計
2019-11-13 05:49:56陳源倪尉楊銳
城市軌道交通研究 2019年10期
陳 源 倪 尉 楊 銳
(1. 中車浦鎮龐巴迪運輸系統有限公司,241060,蕪湖;2. 上海市政工程設計研究院總院(集團)有限公司,200092,上海//第一作者,工程師)
如何提高跨坐式單軌系統道岔發生故障后的搶修能力是一個新的課題。現有的單軌道岔(如重慶市跨坐式單軌線路的道岔)只在信號系統中對道岔進行狀態監測,只能反映出道岔是否失去定、反位表示,無法對道岔故障進行精確診斷及定位。在一些地鐵項目中增加了道岔故障診斷功能,可以通過監測道岔狀態的開關量及模擬量,對道岔電路故障進行有效定位[1],方便現場人員縮小范圍進行故障排查,但是由于這些地鐵項目所采用的道岔與跨坐式單軌系統所采用的道岔在結構和控制原理方面均不盡相同,因而需要結合跨坐式單軌道岔的特點,開發具有針對性的診斷系統。本文以PBTS跨坐式單軌道岔為例,分析了該道岔的工作流程和故障類型,并對其道岔故障診斷系統進行了分析。
1 道岔的故障診斷
1. 1 道岔的工作流程
跨坐式單軌系統道岔的基本工作流程如下圖1所示[2]。

圖1 跨坐式單軌道岔的工作流程
每個單軌道岔均安裝了1個道岔控制面板(SCP)。SCP包括電源模塊、監視和控制設備,其中:控制系統用以保證道岔接收信號命令,在規定時間內完成解鎖、位置轉換和鎖閉工作,并將道岔位置信息反饋至信號系統[3-4]。
1) 道岔啟動過程。當需要操動道岔時,信號系統給道岔提供使能,道岔反饋使能狀態。信號系統確定使能正常后,道岔在接收到信號系統發出的操動命令后啟動。
2) 道岔解鎖過程。在道岔轉動前需先進行解鎖,鎖定推桿運行完成機械解鎖,解鎖傳感器得電后確定解鎖過程完成。
3) 道岔轉轍過程。解鎖完成后,主梁驅動推桿運行,推動梁體到達指定的位置。到位傳感器得電,確定轉換至規定位置。
4) 道岔鎖閉過程。道岔轉動到位后,鎖定推桿運行完成機械上鎖。上鎖傳感器得電,確定鎖閉完成。
1. 2 道岔的故障診斷原理
跨坐式單軌系統道岔故障主要分為機械故障及電氣故障兩種,本文主要對電氣故障進行分析。根據道岔的工作流程,道岔電氣故障可分為繼電器、傳感器等電氣元件故障,以及驅動鎖定裝置故障兩類[5]。
繼電器和傳感器等電氣元件的故障診斷,可通過采集繼電器和傳感器接入點的開關量信息,記錄開關量的開閉時間、開閉次數。如果其開關量異常(開閉時間過長或過短),則可判斷并定位故障的繼電器和傳感器。
驅動及鎖定裝置的故障診斷,可通過采集電機道岔動作時的電流、電壓和功率等電參數模擬量,并根據這些模擬量的異常來判斷定位電機的故障點。
2 道岔故障診斷系統方案設計
2. 1 道岔故障的邏輯判斷及數據采集
每個道岔都是通過邏輯控制單元(PLC)采集繼電器及傳感器狀態并對其進行控制的。道岔的故障診斷也是通過PLC進行分析判斷,并輸出故障信號。
2. 1. 1 故障診斷PLC邏輯
1) 接收到道岔轉動命令后的故障診斷邏輯:在單軌道岔遠程操作模式下,當接收到道岔轉換命令后,道岔的動作過程主要分成解鎖過程、轉轍過程和鎖閉過程。PLC依次監測每個過程中傳感器的狀態,并設置超時時間。每個傳感器的超時時間設置為5 s,當發生超時情況,則可判斷為傳感器故障。 在對解鎖過程及鎖閉過程進行監測時,設置鎖定電機的超時時間為5 s,若發生超時則可判斷為鎖定電機故障;監測轉轍過程時,設置驅動電機的超時時間為15 s(相鄰位置),若發生超時則判斷驅動電機故障。接收到轉換命令后道岔故障的診斷步驟如圖2所示。
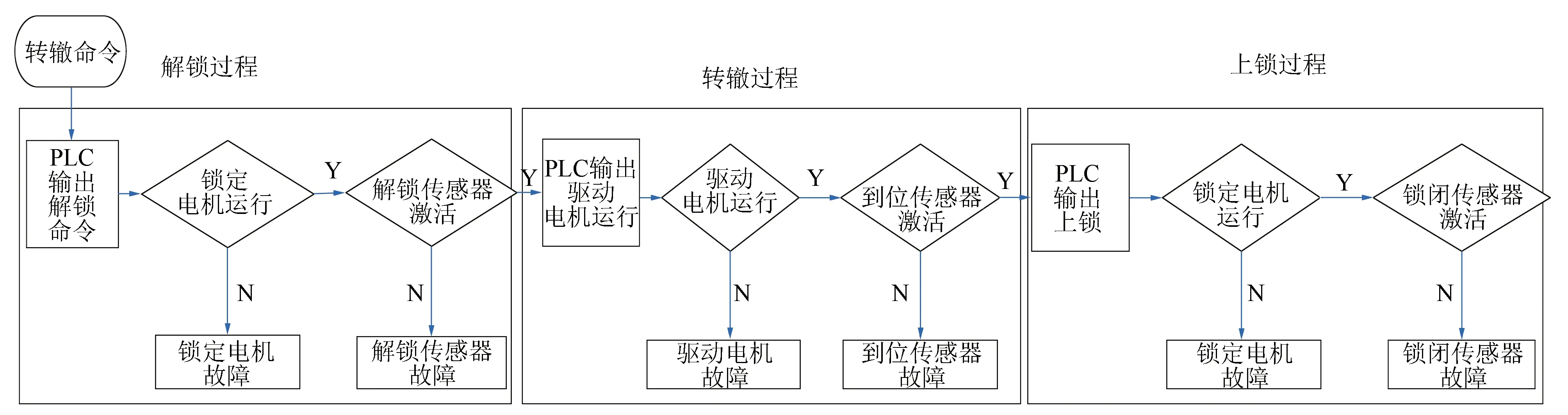
圖2 接收轉換命令后道岔故障診斷流程圖
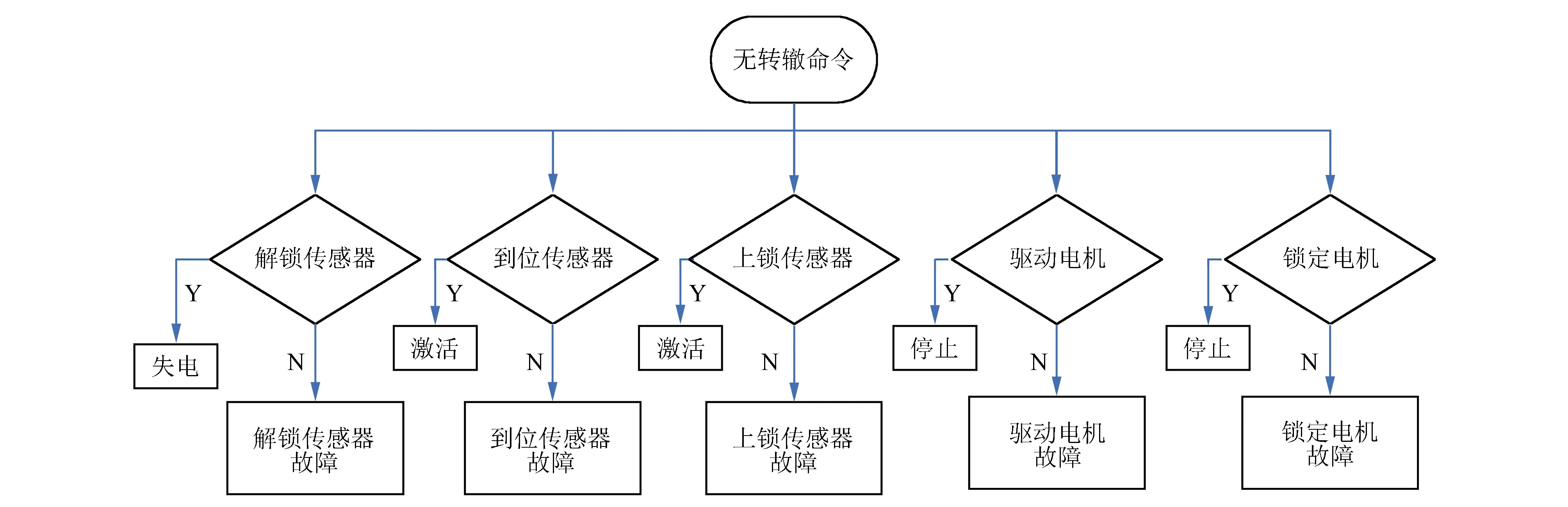
圖3 無轉轍命令時道岔故障診斷框圖
2) 無轉轍命令時的故障診斷邏輯:在沒有收到道岔轉換命令狀態下,道岔應該保持當前位置的鎖閉狀態,電機停止運行。此時,需監測傳感器狀態、PLC輸出及電機的停止狀態。若有任何運行異常,都可判斷為發生故障。其故障診斷如圖3所示。
2. 1. 2 電機參數采集
采用變頻器及伺服驅動器測量驅動鎖定裝置的電流和電壓大小,通過檢測判斷電機電流、電壓的異常狀態來確定故障點。
每一次道岔梁完成轉轍且到位后,可獲得下列數據:移動時間、電動機電流、電動機電壓、電動機功率等。對這些數據進行跟蹤、監測,不僅能夠確定此類故障的故障點,同時還能監測道岔可靠性及可用性,跟蹤道岔的運行狀態,及時進行維護保養。
2. 2 道岔故障診斷系統構成與功能
跨坐式單軌道岔故障診斷系統的組成包括設備端、服務器端和客戶端,如圖4所示。
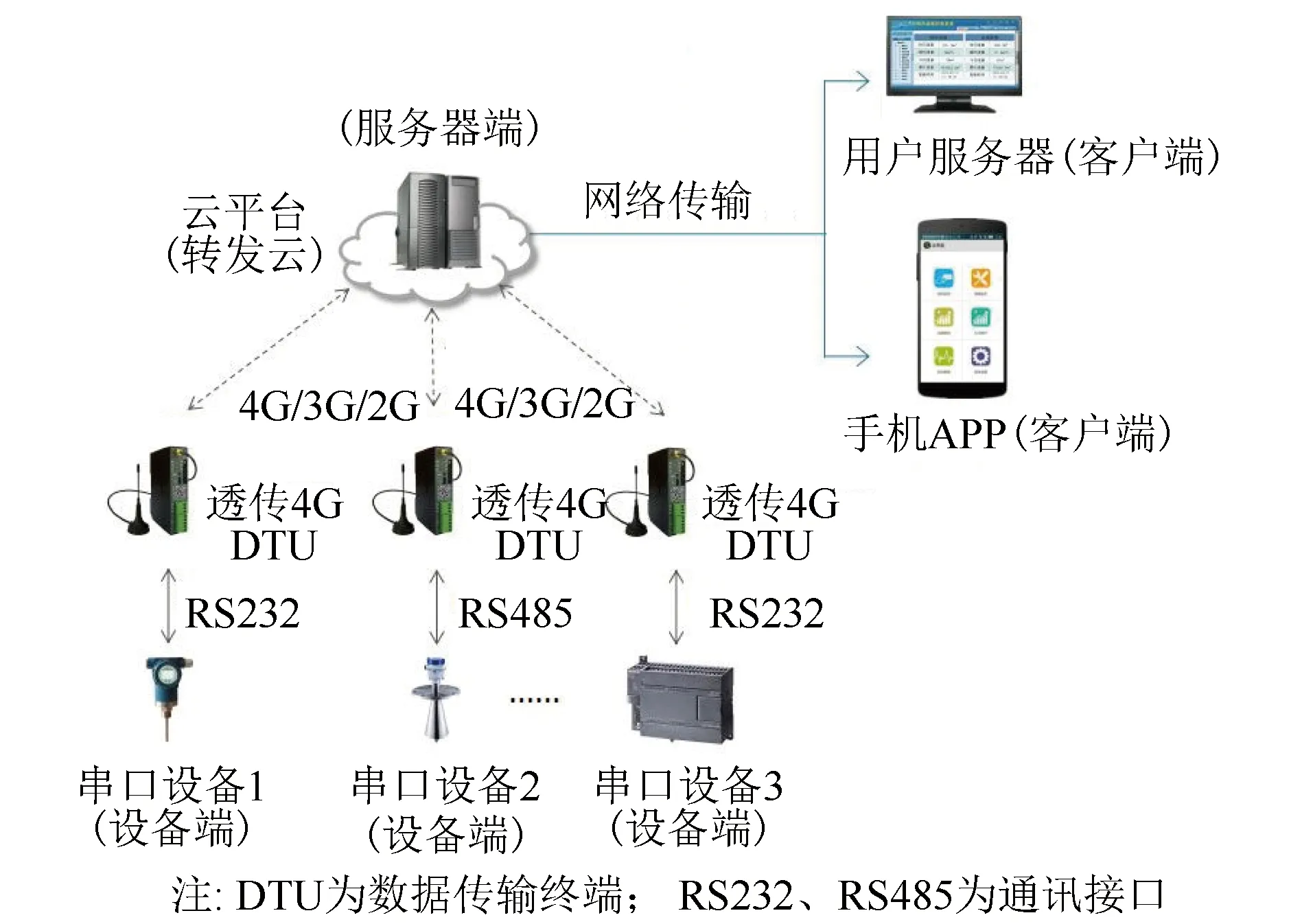
圖4 道岔故障診斷系統組成示意圖
1) 設備端:通過PLC采集傳感器、繼電器的狀態,對道岔狀態進行分析判斷,并輸出故障信息。通過驅動控制器變頻器及伺服驅動器采集電機狀態模擬量電流、電壓、功率等。在現場道岔附近安裝攝像頭,實時監控查看實時畫面。
數據監控模塊安裝在道岔控制箱內。監控模塊通過以太網與PLC進行數據通訊,通過串行通信協議(modbus)與變頻器、伺服驅動器進行通訊,監控模塊采用直流24 V進行供電。數據監控模塊與道岔監控平臺或云端對接。通過互聯網云系統(以太網、通用分組無線服務GPRS、4G等),將現場不同設備大量的數據及信息傳輸到遠端的云數據中心,實現遠程數據監控、設備診斷、程序維護和故障報警等功能。
2) 服務器端:采用云服務器。
3) 客戶端:客戶端包括電腦客戶端、網頁程序(WEB)客戶端和手機應用程序(APP)客戶端。數據監控模塊通過計算機客戶端、手機APP訪問云服務器客戶端,實現以下功能:
(1) 數據監控功能:采用監控模塊的電腦客戶端對監控模塊進行組態設置;通過道岔編號對監控模塊命名,并監測道岔的狀態。
(2) 報警功能:根據故障診斷邏輯設置報警條件和報警內容。當設備層輸出故障時,系統用戶可以得到報警提示,并了解報警發生時間及其內容,可通過綁定微信公眾號實現報警信息的自動推送,也可向指定手機號發送報警信息,以方便維護人員及時了解故障信息,盡快排除故障。
(3) 視頻監控功能:系統和云端可以通過設置在現場道岔附近的攝像頭監控查看實時畫面,也可以調節攝像頭的方向,擴大視野范圍,看到更多的圖像畫面。
(4) 歷史數據回看功能:將需要監控的數據按組分類,分為有轉轍命令和無轉轍命令兩類。在對應的模式中添加需要的監控數據,并將重要的監控數據進行登記保存,供日后調用查看。
3 結語
針對跨坐式單軌道岔發生故障后存在故障修復時間較長、難以診斷故障類型、不能及時定位故障點等問題,本文對其故障診斷及定位系統進行了研究,提出了一種基于跨坐式單軌道岔的故障診斷及定位方法,并提出了故障診斷系統平臺的搭建方案。
跨坐式單軌道岔故障診斷及定位系統能夠實時監控單軌道岔的運行狀態,判斷道岔是否正常工作,并對故障進行定位。該系統可為道岔的日常維護提供數據支持,減輕維修人員的勞動強度,提高跨坐式單軌線路的運行準點率及設備可靠度。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21