船舶智能決策關(guān)鍵技術(shù)實(shí)現(xiàn)方案研究
2019-11-14 12:47:02周丹張寶晨文捷耿雄飛
中國(guó)水運(yùn) 2019年10期
周丹 張寶晨 文捷 耿雄飛
摘 要:為研究船舶智能航行關(guān)鍵技術(shù)智能決策實(shí)現(xiàn)過程方案,對(duì)智能決策的實(shí)現(xiàn)過程進(jìn)行分析,并對(duì)智能決策過程中的關(guān)鍵問題確定航線智能規(guī)劃目標(biāo)、建立航線規(guī)劃模型、確定避碰決策目標(biāo)、碰撞危險(xiǎn)度等進(jìn)行了分析,提出智能決策實(shí)現(xiàn)過程方案。
關(guān)鍵詞:智能決策;航線智能規(guī)劃;智能避碰
中圖分類號(hào):U675.7? ? ? ? ? ? 文獻(xiàn)標(biāo)識(shí)碼:A? ? ? ? ? ? 文章編號(hào):1006—7973(2019)10-0047-02
近年來(lái)通信、感知、人工智能、自動(dòng)化、船聯(lián)網(wǎng)、計(jì)算機(jī)、大數(shù)據(jù)等技術(shù)的快速發(fā)展為智能船舶的發(fā)展提供了有利的工具,智能船舶應(yīng)運(yùn)而生。
船舶智能決策是智能船舶的核心[1-2],船舶智能決策是在對(duì)與船舶航行有關(guān)的環(huán)境、交通、航線、組織管理、航行狀態(tài)等信息進(jìn)行獲取、處理、分析,做出行動(dòng)決策的過程。同時(shí)進(jìn)行航行監(jiān)測(cè),不斷進(jìn)行信息更新、分析、決策,自主航行。
1船舶智能決策關(guān)鍵技術(shù)研究現(xiàn)狀
船舶智能決策關(guān)鍵技術(shù)中船舶智能避碰一直是研究的熱點(diǎn)的與難點(diǎn)。船舶智能避碰是建立在人們對(duì)船舶避碰過程中一系列的行為特征進(jìn)行研究[3-4]的基礎(chǔ)上并應(yīng)用而產(chǎn)生的船舶自動(dòng)避碰系統(tǒng)與智能避碰。早起的自動(dòng)避碰系統(tǒng)包括咨詢式避碰專家系統(tǒng),能夠?qū)崟r(shí)推薦避碰決策方案,以供駕駛?cè)藛T進(jìn)行參考全自動(dòng)避碰決策系統(tǒng);全自動(dòng)式船舶避碰決策系統(tǒng),它能夠自動(dòng)給出避碰決策,并能自動(dòng)控制船舶的車和舵;智能駕駛決策輔助系統(tǒng),是一種智能駕駛決策輔助系統(tǒng)。近年來(lái),近些年來(lái),學(xué)者們能夠完整的論述船舶自動(dòng)避碰系統(tǒng),在密集水域和開放水域都試用了智能輔助船舶自動(dòng)避碰技術(shù)[5],在集成避碰系統(tǒng)方面也逐漸成熟,得到了較好的效果。
船舶智能決策的另一關(guān)鍵技術(shù)航線規(guī)劃,目前,航線規(guī)劃方法主要分為三種類型。基于事例的學(xué)習(xí)規(guī)劃方法, 這類方法的基本原理是依靠過去的經(jīng)驗(yàn)進(jìn)行學(xué)習(xí)及問題的求解,通過修改事例庫(kù)中與當(dāng)前情況相似的舊的事例來(lái)獲得行動(dòng)方案。基于環(huán)境模型的規(guī)劃方法,通常將現(xiàn)實(shí)世界抽象為網(wǎng)絡(luò)/圖和網(wǎng)格兩種環(huán)境模型,然后采用圖搜索算法在起始港和目的港之間尋找最優(yōu)航線。基于行為的航線規(guī)劃方法,將包容式結(jié)構(gòu)中建立的基于行為的規(guī)劃方法應(yīng)用于航線規(guī)劃是一種新的發(fā)展趨勢(shì)。
已有的船舶智能避碰與航線規(guī)劃均為針對(duì)避碰與航線規(guī)劃單過程的智能系統(tǒng),而非針對(duì)船舶智能航行系統(tǒng)的智能決策,若船舶實(shí)現(xiàn)航行智能自主將與單智能避碰與單航線規(guī)劃不同,本文對(duì)船舶智能決策關(guān)鍵技術(shù)船舶智能避碰與航線智能規(guī)劃進(jìn)行分析,提出船舶智能決策關(guān)鍵問題與實(shí)現(xiàn)過程方案。
2 智能決策
船舶航行智能決策對(duì)船舶航行感知的不同信息,進(jìn)行大數(shù)據(jù)處理、計(jì)算機(jī)分析,以船舶、交通研究的各項(xiàng)理論、智能決策理論與技術(shù)為基礎(chǔ),對(duì)船舶航行行為進(jìn)行智能決策和規(guī)劃。船舶智能決策主要包括船舶航線智能規(guī)劃、船舶智能避碰兩部分。
2.1航線智能規(guī)劃
航線智能規(guī)劃是對(duì)船舶從起始港到目的港的路線智能規(guī)劃設(shè)計(jì),其目標(biāo)是選擇最優(yōu)航行路徑實(shí)現(xiàn)路徑最短、時(shí)間最優(yōu)、安全性最好、能源消耗最小等。
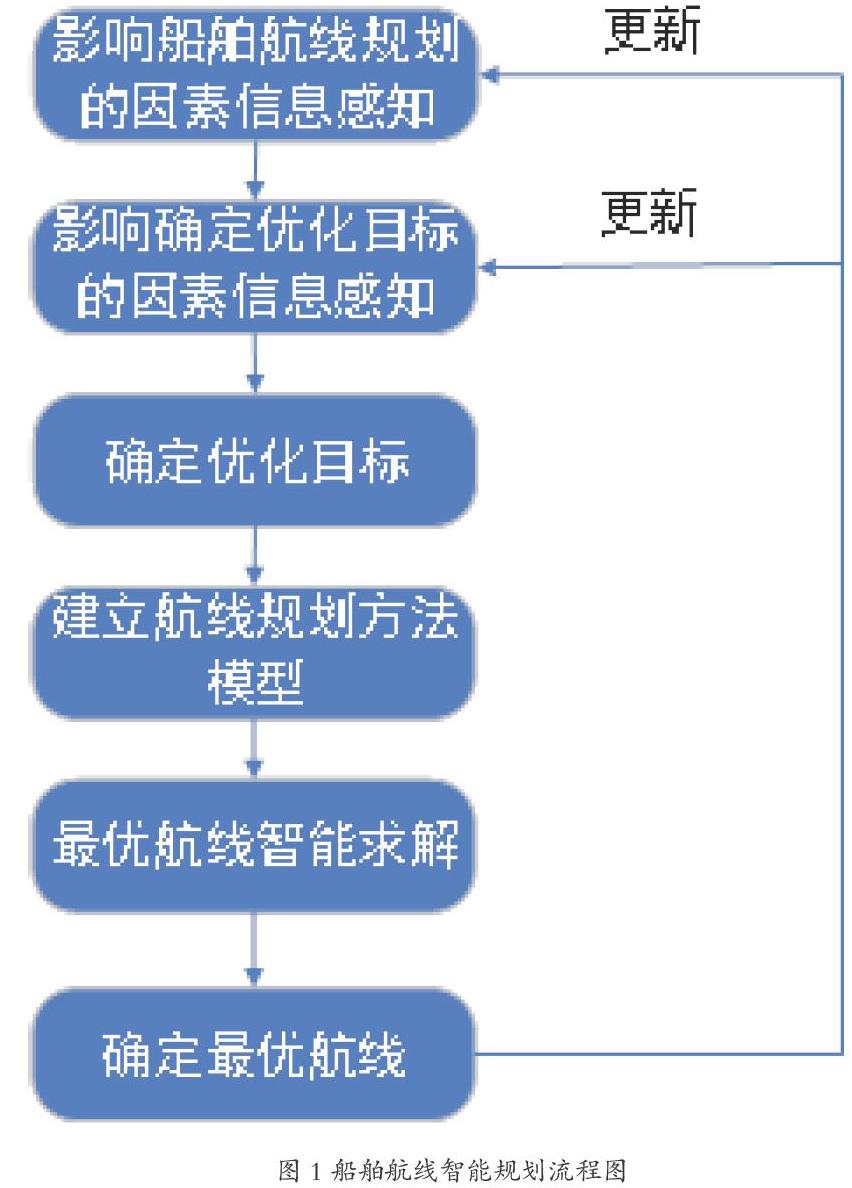
實(shí)現(xiàn)航線智能規(guī)劃,首先,需對(duì)影響船舶航線規(guī)劃的不同因素條件進(jìn)行智能感知,包括環(huán)境條件、氣象條件、交通條件、貨物條件、船舶條件、航行任務(wù)要求等。其次,實(shí)現(xiàn)航線智能規(guī)劃需對(duì)影響確定優(yōu)化目標(biāo)的因素進(jìn)行感知,并智能確定優(yōu)化目標(biāo),在不同的條件下,目標(biāo)的選擇不同,目標(biāo)的優(yōu)先級(jí)也不同。船舶航行智能規(guī)劃不同目標(biāo)之間存在相互博弈,需根據(jù)具體情況而定。船舶航線優(yōu)化問題可抽象為帶有復(fù)雜約束條件的多目標(biāo)動(dòng)態(tài)優(yōu)化問題,通過構(gòu)建船舶航線優(yōu)化響應(yīng)模型,并進(jìn)行求解,得到優(yōu)化算法,實(shí)現(xiàn)航線的動(dòng)態(tài)優(yōu)化。船舶航線智能規(guī)劃過程如圖1所示。
船舶航線智能規(guī)劃分為全局航線智能規(guī)劃和局部航線智能規(guī)劃。航行前在對(duì)某些航行環(huán)境等條件未知,航線規(guī)劃的基本思路是首先粗略地規(guī)劃出從起始港到目的港的全局計(jì)劃航線,在航行的過程中不斷通過AIS、VTS、雷達(dá)等各種傳感器獲取和更新海域環(huán)境信息、交通信息等,并在此基礎(chǔ)上在線重新規(guī)劃到目的港的全局航線和從當(dāng)前位置到周圍一定范圍內(nèi)的局部航線優(yōu)化航線。全局航線規(guī)劃以整個(gè)航行過程為對(duì)象,主要考慮與全局航行相關(guān)的條件因素,而局部航線規(guī)劃則重點(diǎn)以局部的航跡、位置、船舶行為和時(shí)間規(guī)劃為主要對(duì)象,受船舶周圍條件因素的影響。
2.2船舶智能避碰
船舶智能避碰是船舶智能航行的核心關(guān)鍵問題也是難點(diǎn)問題。船舶智能避碰可分為兩類,一類為船舶智能避讓礁石、淺水區(qū)域或其他靜態(tài)礙航物等,另一類為船舶之間的避碰。其中第一類,船舶智能避碰可依賴于船舶自動(dòng)導(dǎo)航系統(tǒng)進(jìn)行航線智能規(guī)劃實(shí)現(xiàn);第二類則主要依靠船舶智能避碰決策系統(tǒng),以下主要針對(duì)船船間智能避碰進(jìn)行論述。
傳統(tǒng)的船舶駕駛員避碰決策過程主要以駕駛員的經(jīng)驗(yàn)為主,海上避碰規(guī)則對(duì)避碰行為的規(guī)定也僅為避碰行為需滿足“早大寬”。駕駛員根據(jù)經(jīng)驗(yàn)對(duì)與他船之間的會(huì)遇進(jìn)行分析,采取避碰措施。船舶智能避碰需對(duì)本船與他船會(huì)遇,會(huì)遇避碰場(chǎng)景,最近會(huì)遇距離,碰撞危險(xiǎn)度,兩船相互之間應(yīng)保持的最近通過距離,采取避碰決策的時(shí)間與轉(zhuǎn)向幅度等進(jìn)行分析判斷決策。
船舶智能避碰須依賴船舶航線智能規(guī)劃,通過航線智能規(guī)劃能夠更早的對(duì)碰撞危險(xiǎn)進(jìn)行判斷與預(yù)測(cè),從而更加有利于船舶對(duì)避碰/復(fù)雜避碰更早的做出避碰決策方案。若實(shí)際避碰過程中仍可能發(fā)生碰撞危險(xiǎn)或緊迫危險(xiǎn)的局面,則駕駛員對(duì)避碰行動(dòng)進(jìn)行調(diào)整,或采取連續(xù)的避碰措施。船舶智能航行的避碰過程為:
(1)根據(jù)船舶的局部航線規(guī)劃預(yù)測(cè)船舶未來(lái)航跡。
(2)監(jiān)測(cè)并預(yù)測(cè)本船與他船在不同時(shí)刻的會(huì)遇情況。
(3)若會(huì)遇,則判斷碰撞局面、會(huì)遇局面與最近通過距離(DCPA)。
(4)若碰撞局面為非復(fù)雜避碰,則可對(duì)船舶實(shí)際航跡進(jìn)行監(jiān)測(cè),判斷會(huì)遇局面,確定DCPA;若碰撞局面為復(fù)雜碰撞,例如多船會(huì)遇,復(fù)雜交通等,則需根據(jù)航跡規(guī)劃的預(yù)測(cè)航跡,根據(jù)避碰局面,做出避碰決策,及早大幅度避讓。
(5)確定到達(dá)最近通過距離點(diǎn)的距離與時(shí)間(TCPA)。
(6)確定碰撞危險(xiǎn)度。
(7)確定某危險(xiǎn)度下的船舶領(lǐng)域。
(8)根據(jù)碰撞危險(xiǎn)度選擇采取避碰行動(dòng)的時(shí)間,并根據(jù)確定的船舶領(lǐng)域,確定能夠安全避讓的避碰幅度。
(9)實(shí)際避碰過程中發(fā)生碰撞危險(xiǎn)或緊迫危險(xiǎn)的局面,則應(yīng)對(duì)避碰行動(dòng)進(jìn)行調(diào)整。
其中碰撞危險(xiǎn)度、船舶領(lǐng)域、采取避碰行動(dòng)的時(shí)間、避碰行動(dòng)與幅度等的選擇需考慮船舶智能航行決策在時(shí)間、操作精度等上與駕駛員操作的差異。
3 結(jié)語(yǔ)
船舶航線智能規(guī)劃、智能避碰是智能船舶的關(guān)鍵技術(shù),目前技術(shù)的研發(fā)還處于起步階段。本文提出了船舶航線智能規(guī)劃與智能避碰的實(shí)現(xiàn)過程方案,還需進(jìn)一步的深入研究,尤其是船舶智能避碰決策目前還存在理論與技術(shù)上需要突破的難題。
參考文獻(xiàn):
[1]嚴(yán)新平,柳晨光. 智能航運(yùn)系統(tǒng)的發(fā)展現(xiàn)狀與趨勢(shì)[J].智能系統(tǒng)學(xué)報(bào),2016,11(6):807-817.
[2]高宗江,張英俊,孫培廷等.無(wú)人駕駛船舶研究綜述[J].大連海事大學(xué)學(xué)報(bào),2017,43(2):2-7.
[3]P.V.Davis, M.J.Dove, C.T.Stockel. A computer simulation of marine traffic using domains and arenas [J].The Journal of Navigation, 1980, 33(2): 215-222
[4]Wang, Y. Y.. An Empirically-Calibrated Ship Domain as a Safety Criterion for Navigation in Confined Waters. The Journal of Navigation, 2016,69, 257-276 .
[5]M.D.Nguyen,V.T.Nguyen and H.Tamaru,Automatic Collision Avoiding Support System for Ships in Congested Waters and at Open Sea[J].International conference on Control, Automation and Information Sciences, 2012, 5(6):96-101.