看天線,識衛星
——漫談衛星天線(五):深空探測器的“大鍋”及其測控網(上)
2019-11-15 06:11:38袁東
衛星與網絡 2019年7期
袁東

深空探測器,一旦踏上漫漫星際征途,就一去不返,漸行漸遠,飛得最遠的旅行者1號探測器距離地球已經有144個地日距離(AU,1個地日距離約1.5億公里)。然而,依靠特殊的天線技術,地球至今仍能夠和這些無畏的使者保持聯系。請看本期——深空探測器的“大鍋”及其測控網(上)。
“……小時候我一直有個夢/有一天我要飛上外太空/就像夏夜繁星閃爍……”五月天演繹這首《小時候》表達了人類一直渴望擺脫地球搖籃奔向外太空的夢想。戲劇性的是,上世紀50年代中后期在冷戰鐵幕的陰影之下,蘇聯于1957年10月4日發射了人類第一顆衛星,宣布了美蘇兩個超級大國太空競賽的開始,從而加速了這個夢想的實現。
美蘇兩國互不相讓,均試圖拿下更多的“第一次”。從圖1的表中可以看出,人造地球衛星發射后不到1年時間里,他們就爭相邁出了各類太空探索的第一步,步伐和手筆之大令人感慨。
好比是蹣跚學步的嬰兒就試圖飛奔,這些初次嘗試的結果,大多告以失敗。據統計,從1958年~1965年,美蘇兩個大國發射的66個深空探測器,成功的僅有11個。失敗的原因,包含多次運載火箭的故障,但也有不少是因為深空探測特性增加的難度。我們先分享一下蘇聯在深空探測起步階段的一些故事。
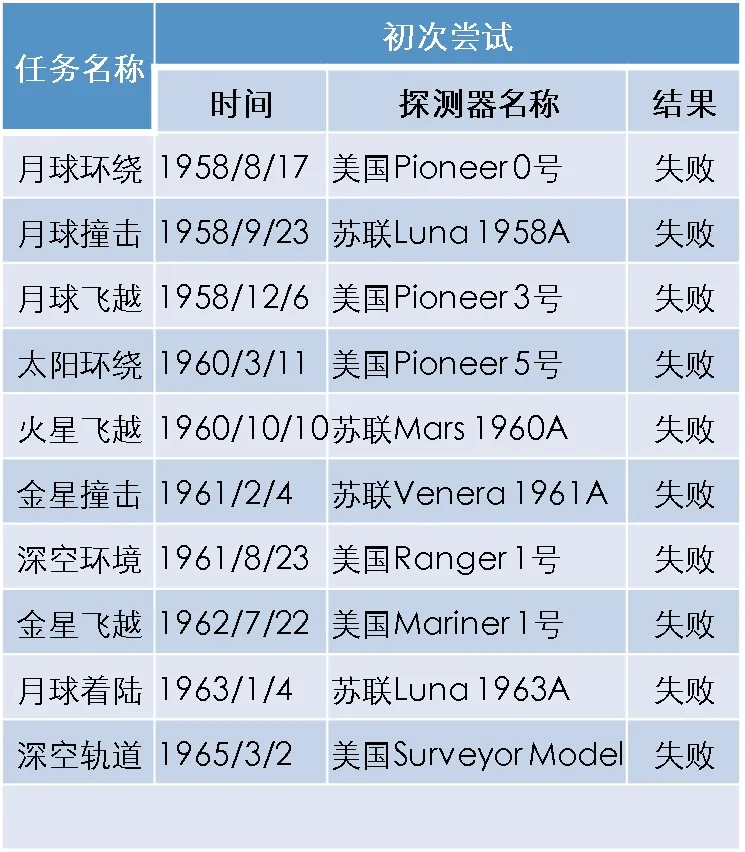
圖1 1958年~1965年的10個“首次”探測項目
一、深空探測的先驅——蘇聯的月神(LUNA)計劃
科羅廖夫和他的同事在1956年即開始討論探月任務的設想,1958年1月蘇聯著名的科學家馬斯蒂斯拉夫·克爾德什(MstislavKeldysh)給科羅廖夫寫信,提出了探測器撞擊月球并拍攝圖像傳輸到地球的設想,在兩人的說服下,蘇聯政府于1958年3月20日對探月項目予以立項。(參見圖2)
(一)差之毫厘,謬之千里的蘇聯Luna1探月嘗試
探月的難度可想而知,蘇聯的初次嘗試選擇了撞月,因為萬一沒射中,變成繞月、環月飛行,這也算是“首次”。為了達到11千米/秒的逃逸速度,R-7火箭加裝Block-E第三級,Block-E干重1.12噸,在一對環形罐中貯存7噸煤油和液氧驅動RD-0105火箭發動機。從洲際彈道導彈衍生而來的R-7可以使用自主慣性制導系統飛行,雖然開發了更精確的制導和控制系統,但其精度僅為10公里左右。通過使用拜科努爾發射場兩側250公里處的一對無線電測控站組成地面無線電三邊測量和制導系統,測距精度提高到2公里,測角精確達到1/12度,結合使用多普勒頻移分析技術測速精確達到2米/秒。這種精確度對于太空探測任務至關重要!(參見圖3)
撞月的探測器主體為一個直徑80厘米的球形艙,由鋁鎂合金制成,重170千克,由銀鋅和氧化汞電池供電。和Sputnik-1衛星一樣,兩個半球形部分用螺栓和橡膠墊圈連接,充1.3個大氣壓的氮氣。(參見圖4)
科學艙帶了一些蘇聯國旗等紀念品,還包含了一對由五角形獎章和蘇聯徽章組成的不銹鋼球體(直徑7.5和12厘米),球體內還裝了炸藥,在撞擊時爆裂并把徽章灑向月球!不過3.3千米/秒的撞月速度,炸藥明顯多余,而且紀念品應該都汽化了。(參見圖5)

圖2 科羅廖夫和克爾德什都是功勛卓著的蘇聯科學院院士
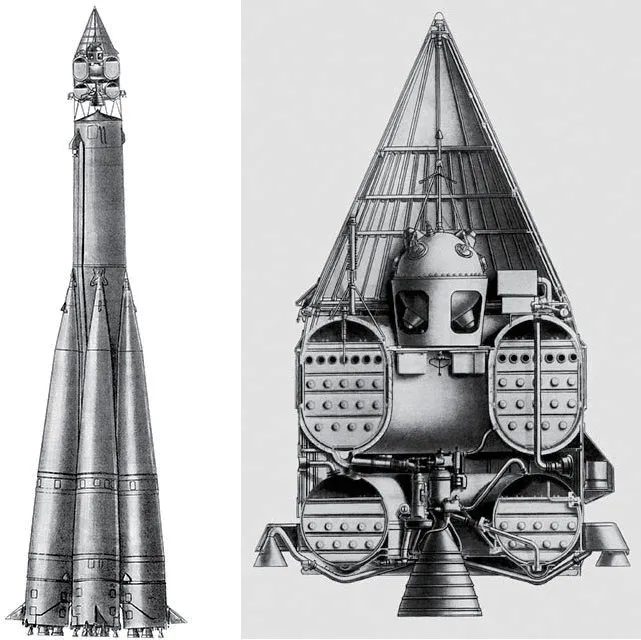
圖3 增加了第三級的R7火箭,
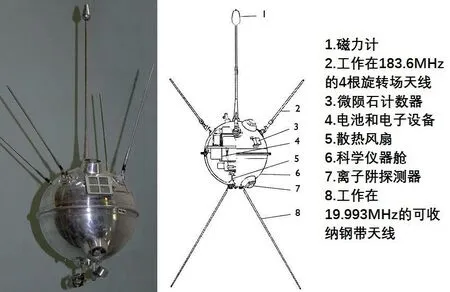
圖4 Luna1探測器
月神計劃無疑是命運多舛的。前三次發射,分別因為燃燒不穩定、火箭燃料管線中9至13Hz的共振問題、一級發動機的過氧化氫泵故障而失敗。1959年1月2日Luna1終于成功發射,奔月速度達到11.17千米/秒。理論上撞擊月球的精度可以控制在100-200公里范圍,但由于地面導航系統中預設R7火箭無線電導航參數時出現了2°的偏差,導致Block-E多燃燒了幾秒,Luna1錯過月球,飛行34小時后從月球身邊5995公里擦肩而過,進入日心軌道。
這次“投石問路”的壯舉真可謂“差之毫厘,謬之千里”!不過即便在陰差陽錯下,Luna1測量到月球沒有磁場,還測量到太陽發射的等離子流——“太陽風”,并獲得“第一顆人造行星”稱號。
糾正了導航錯誤,1959年9月12日,蘇聯的Luna2號精確地撞擊到月球上兩座環形山之間,這是人類文明史上第一次將人造物體降落(砸)在月球上。
(二)軌道設計成就“月之暗面”的第一個探測器——Luna3
Luna2號的成功撞擊對于美國人來說無疑是一種刺激,但還沒等他們緩過神來,三個星期后,Luna3號又從發射場起飛,它重約434千克,不但成為人類近距離拍攝月球照片的首枚探測器,而且向人類傳回了首張月球背面的圖片。
拍照并回傳,在當時來說是高難度動作,擺在面前的難題有:
1、膠片時代,沒有數碼相機,探測器上需要能沖洗照片并掃描成電信號回傳。
2、照相機需要對準月球。
3、沒有成熟的定向天線,發射機功率又有限,如何把照片信號可靠的回傳地球?要知道蘇聯在1957年建成的第一代測控網,一共13個站點,但均集中在北半球,只能實現部分區域的測控。(參見圖6)
針對第一個問題,列寧格勒電視科學研究所(NII-380)開發了一個光電攝像單元,結構緊湊,f/5.6光圈的200毫米鏡頭和帶有f/9.5光圈的500毫米鏡頭可同時拍攝兩張照片。耐溫和抗輻射的35毫米膠片技術,是通過對繳獲的美國Genetrix氣球進行逆向工程研發。40個膠片存儲在鉛襯倉中,膠片拍攝完之后顯影、定影、干燥,來自陰極發光管的光束掃描膠片,圖像由光電倍增管讀取并輸出成像,實現了1000x1000的分辨率。讓探測器變成了一個太空相片沖洗店。(參見圖7)

圖5 撞擊月球的兩個不銹鋼球體,7.5和12厘米直徑,內有炸藥,撞擊月球放煙花
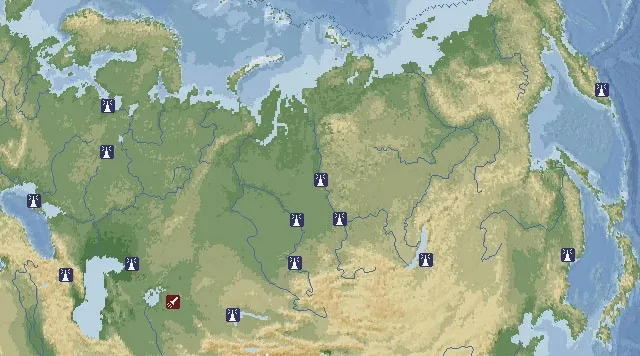
圖6 蘇聯在1957年建成的第一代測控網,13個站點均集中在北半球
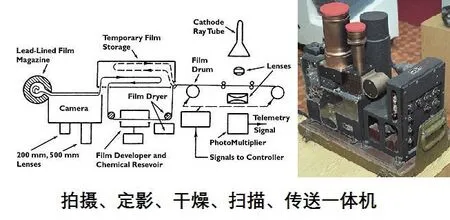
圖7 小巧緊湊的太空沖洗掃描店
針對第二個問題,蘇聯科學家BorisRaushenbakh首次研制出探測器的三軸穩定系統,稱為Chaike(Seagull)“查克”控制系統。前后8個廣角光電管測量太陽光,下圖中(S)和(B)標注,一個窄角月光傳感器(m)通過攝像窗口探測月光,三個陀螺儀(d)測量角速度,由繼電器構成的專用計算機控制8個微型噴嘴,它們可以發出1/10秒的脈沖,由壓力為150大氣壓的氮氣罐提供動力。這套系統能夠讓相機穩定對準月球拍攝。(參見圖8)
第三個問題其實最難。受到衛星條件限制,“沖洗”完的照片數據只能使用3瓦的功率在183.6MHz載波上發送圖片信號。地月距離在36~40萬公里范圍,是上期《GEO通信衛星的秘密|看天線,識衛星——漫談衛星天線(四)》中講的GEO軌道的十倍,探測器發回的信號與發射同樣功率的地球同步軌道衛星信號相比,強度只有后者的1/127!當時蘇聯的地球站還不具備遠距離接收這么微弱信號的能力,怎么辦?(參見圖9)
LUNA計劃發起者,蘇聯著名的科學家馬斯蒂斯拉夫·克爾德什想了個率性、大膽也是高風險的解決方案——飛回來再接收!探測器借月球引力,輔助機動折返地球,靠近北半球之后再傳送信號!這在當時是最復雜的航天器太空機動。
首先必須精確控制好R7火箭第三級的速度,Block-E關機后的速度必須比地球逃逸速度低60-90米/秒,不能超,否則回不來!(參見圖10)
其次,要控制好方向,蘇聯跟蹤和制導系統現狀只能向北發射,但發射后必須偏轉,瞄準月球南極附近,在距離其表面幾千公里繞行,受月球引力影響后繞回地球北面,也就是蘇聯領土上方的無線電測控區域回傳數據。在Steklov數學研究所的Strela-1計算機模擬了地球、月球和太陽的引力,精確計算了軌道,并為蘇聯遠東堪察加半島的耶利佐沃遙測站和西端克里米亞南部的卡什卡山站兩個無線電測控提供了建議。
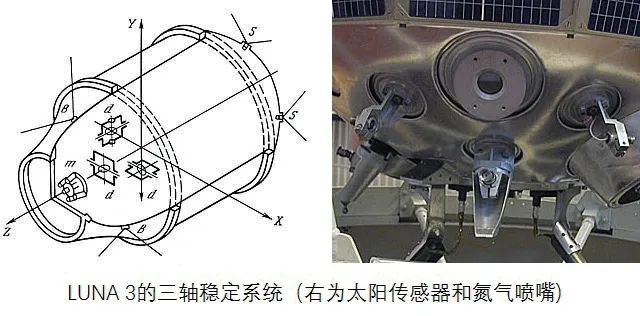
圖8 Luna3的三軸穩定系統,右為太陽傳感器和氮氣噴嘴
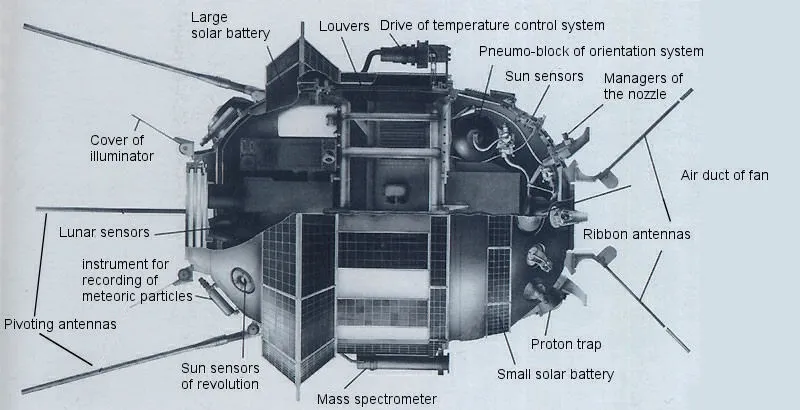
圖9 照片信號通過Luna3頭部四根鞭狀旋轉場天線發射(183.6MHz),功率僅3瓦
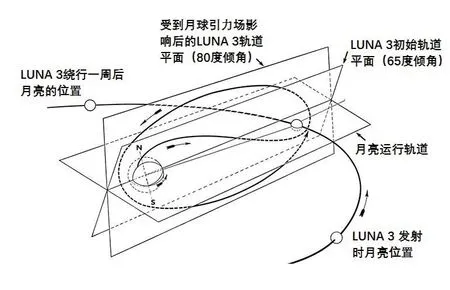
圖10 從北面出發,從北面回來,月球引力輔助機動完美解決當時蘇聯深空探測的短板
作為向人造地球衛星發射兩周年紀念的致敬,1959年10月4日,Luna3探測器成功發射,獲得了10.855公里/秒的亞地球逃逸速度。在長途奔襲中失去測控,主要依靠定時器按照設定的時序自動開展各項工作,因此Luna3的另一個稱謂是“TheAutomaticInterpla netaryStation”(自動行星際站)。(參見圖11)
令人佩服的是Luna3首次成功的拍攝到了月球背面的照片。在返程中,由于回傳的信號實在太微弱,當探測器靠近地球至4萬公里時照片傳輸才得以有效進行!本次拍攝并成功洗出17張照片,其圖像需要8個小時傳輸,體裝式太陽能發電貼片的供電卻跟不上,Luna3的無線電發射器只能傳一個小時,然后在待機模式等著用太陽能給電池充電兩小時再繼續……最終花了25小時傳送了十多張照片。
說實話,千辛萬苦傳回的照片質量相當糟糕,但卻是人類第一次見到神秘的月之暗面(The Hidden Side Of The Moon),這是首次從太空視角向人們展現月球,以至于在世界各地出版時,引起了廣泛的興奮和興趣。
二、深空探測的難關和解決策略
蘇聯月神計劃中,地面僅有為數不多的10kW發射機測控站,探測器是區區數瓦的全向發射天線,這些低增益天線系統著實增加了深空探測任務的難度!而測控精度上的細微紕漏又直接影響到任務成功與否。
再來看看美國,作為Pioneer/Able計劃的一部分,美國也試圖向月球發送簡陋的探測器,而所有這些任務都失敗了,Pioneer-4是1959年3月3日第一個達到地球逃逸速度的美國航天器,執行的月球飛越任務卻偏離了月球有6萬公里之多。
月球其實是地球人進行深空探測時家門口的第一站,都遇到了這么多麻煩,后續怎么辦!細細分析并歸納起來,難題可以分為三類,而通過幾十年的努力也有了一些解決策略。(參見圖12、13)
(一)深空探測的測控難

圖11 在太空Luna3尾部彈出兩根鋼帶天線構成V型偶極子測控天線(39.986MHz)
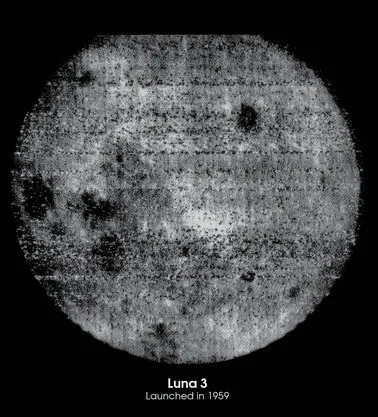
圖12 月之暗面——1959年Luna3拍攝
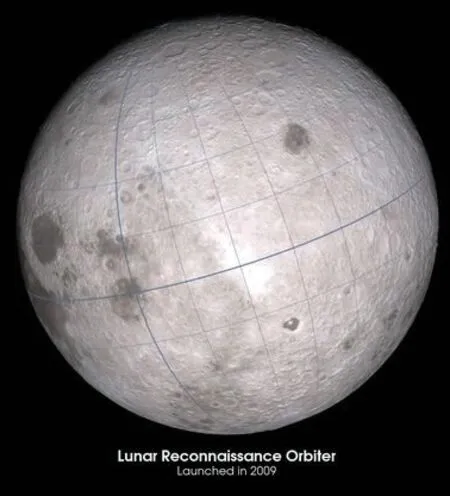
圖13 月之暗面——2009年月球勘測軌道飛行器拍攝
國際上對于測控定義為Tracking,Telemetry&Command,即前幾期經常提到的TT&C,中文通常稱之為“跟蹤、遙測及遙控”。對航天測控的跟蹤通常包含測距、測速及測角三種操作,對于深空探測來說,用雷達回波時延測試超長距離會面臨回波微弱,難以和噪聲區別、檢測困難的問題,必須采用比特位長特別長的偽隨機碼才能滿足超長距離測距的需要;對于測角來說,傳統采用方向性極強的天線波束對準目標航天器,實現對其偏離軸向的方向和大小的測量,該方法對木星以遠的深空探測存在精度不足的問題,70年代后期采用了VLBI(甚長基線干涉測量法),簡單來說,VLBI就是把幾個小望遠鏡聯合起來,多個測控站相隔幾千公里組成基線很長的天線陣干涉測量,分別在同一時刻接收同一射電源的信號,對各自的數據記錄并進行相關運算,求出觀測值,達到一架大望遠鏡的觀測效果,從而極大地提高了分辨率,滿足精度要求。一個地日距離下,目前精度已經可以小于1nrad,相當于誤差低于150米;實時性要求高的還可以采用NASA1990年代開發的CEI(ContiguousEle mentsInterferometer),連接元干涉儀技術實現實時測角。
遙測通常是指通過遙測系統來獲取航天器各系統的工作及環境狀態等信息,為航天器的運行或故障處理等提供依據,遙控是指對空間中的航天器進行遠距離控制,主要用于對航天器進行數據注入、各種開關控制、載荷控制、軌道控制和姿態控制等。遙測和遙控在數據傳輸上數量不大,一般而言實時性要求極高,然而對于深空探測來說,30萬公里/秒的光速都嫌慢,從下表中可以發現到月球還是秒級的時延,但對于7535~4297百萬公里以外的冥王星,單程時延已經長達4~7小時,如果有操作人員按下“發動機點火”的開關,傳遞到冥王星探測器上,黃花菜也涼了!即便是大家津津樂道的火星,單程時延也達到3.31~22.294分鐘,打電話給移民火星的地球人基本不可能,發個短信估計要吃上一頓飯才能收到回復,未來要打星際電話,恐怕只能指望星球大戰里的原力成真,實現全息視頻通信。(參見圖14)

圖14 與各個行星之間的超長距離,帶來了測控和通信的大難題

圖15 國際上對于深空通信上下行鏈路的頻率分配
因此,對于月球探測通信,還勉強可以采用準實時的遙控方式控制航天器平臺和有效載荷;對于其他更遙遠的行星,需要探測器在不同飛行階段具備一定的自主導航和制導控制能力。
(二)深空探測的通信難
深空探測器采集到的任務相關數據,比如照片、科學數據,往往數據量比較大,然而長距離造成了極大的信號路徑損失,降低了接收信號的信噪比,限制了傳輸速率的提高。因此,增大天線口徑,縮小波束寬度,能量盡可能集中而不浪費在空間,采用拋物面定向天線是較好的辦法,這也是題圖各式探測器大多“頭頂一口鍋”的由來。但由于受到航天器安裝尺寸、重量的限制,天線口徑受限,對于木星及以外的外行星探測還必須采用其他的辦法來提高天線增益:
1、盡可能增大天線口徑,使用更高的頻段
天線增益和天線口徑成正比,和波長的平方成反比,理論指導實踐,主要的幾個航天大國地球站口徑從一開始的26米、32米、34米,向64米、70米、100米進軍,相當于用大喇叭喊話和大耳廓聆聽;也有通過幾個天線組陣方式增加天線口徑,如在卡西尼造訪土星的時候,每天發回的數據量達到4Gb,為了解決這個問題,34米和70米口徑天線組陣滿足任務需求。
探測器上的天線口徑也一樣,阿波羅計劃探測月球使用的天線口徑僅0.6~1.5米,旅行者號增加到3.66米,1989年發射的伽利略號土星探測器增加到4.8米,幾乎達到運載火箭整流罩的容納極限。深空探測的通信頻段也在不斷提高,1960年代廣泛使用S波段作為上下行,1970年代開始啟用X波段,1990年代卡西尼號探測器甚至啟用Ka波段作為下行。更高的頻段,波長更小、天線增益更高,同時也不易受到電離層和太陽等離子區中帶電粒子的影響,不過短波長對于天線的加工精度、變形等要求增加,對地球站的熱變形、陣風變形、重力下垂變形等考驗極大。(參見圖15)
2、增加發射功率
為了提高發射功率,深空探測地球站使用數百千瓦到一千千瓦的信號放大器;對于航天器來說,采用高性能太陽能發電帆板供電,木星距離以遠的行星,采用同位素熱電偶(RTG)發電,以達到最低幾十瓦級別的發射功率。
3、采用信道編碼、信源壓縮技術
由于信號微弱、干擾等原因,地球站接收的數據難免有錯,如果采用重傳的方式,在大時延的情況下,一來一去,會非常的痛苦。因此糾錯編碼是一種有效的辦法,現有的深空探測器都無一例外地采用了有效的糾錯編碼方案,典型方案是以卷積碼作為內碼、里德一所羅門(R-S)碼作為外碼的級聯碼。隨著計算處理能力的發展,也逐步采用具有優異性能的Toubo碼和LDPC碼等長碼進行信道編碼。
另外日常辦公使用的數據壓縮技術也當仁不讓地應用在深空探測上,在相同的傳輸能力下,能夠將更多的數據傳回地球,緩解對數據通信的壓力。只不過對于耗資巨大、千辛萬苦獲得的原始圖像和科學數據,必須采用無損壓縮,一般做到3:1的壓縮率。
4、降低地面接收系統的噪聲溫度
深空探測任務中返回的信號十分微弱,信噪比極低,為了努力降低地面接收系統的噪聲水平,普遍在地球站采用低溫制冷超低噪聲溫度放大器。
(三)深空探測的通信保持難
地球在不停地旋轉,要和天上的探測器保持7×24小時不間斷的通信,要求在地球表面間布下全球性的陸基深空網,理論上在地心角相距120度的地方各建一座地球測控站,即可對巡航期間的航天器進行全天時連續觀測。
深空探測雖難,但只要思想不滑坡,辦法總比困難多!兩個超級大國為了在太空競賽中拿到更多的第一,在深空探測上可謂拿出了舉國之力,然而結局卻截然不同……(未完待續)
