雙關節機械手最優軌跡控制算法優化
2019-11-16 06:01:30趙連娟
電子技術與軟件工程 2019年20期
文/趙連娟
常見工業機器人就是利用對于機械手中的伺服電機進行控制,準確控制機械手自由端運行軌跡,常見類型有:直接坐標型、圓柱坐標型、球坐標型和關節型。如圖1所示,關節型機械手運行軌跡通過極坐標來研究。關節式機械手是一種適用于靠近機體操作的傳動形式。它由仿生學設計而來,可實現多個自由度自由連接,動作靈活,適于在狹窄空間工作。在本文中主要研究關節型機械手的控制算法優化問題。

圖1:機械手主要類型
1 控制現狀
工業機械手在運行中就會面臨著抖動,而抖動會增加額外的能量輸出從而引起軌跡變化。工業機械手的軌跡規劃主要有兩種:一種是對機械手的路徑軌跡規劃,另一種是對機械手運動過程中的位移、速度以及加速度的曲線輪廓規劃。
對于多關節機械手來說,運行軌跡是不固定的,所以可以從運行軌跡分析系統,也能從能量角度上減少能量損失,對其速度、加速度進行算法優化控制。在傳統控制過程中,一般采取普通差分算法,通過樣條插值逐漸逼近控制最優參數。
2 算法優化方法
由于簡單的三次樣條函數差值優化算法會產生抖動,規劃曲線不夠平滑,所以要對原算法進行優化。對于雙關節機械手每一關節的擺線運動學方程表達式描述如式(1):

對運行軌跡離散化,對其進行采樣,采樣時間選擇為

圖2:理想軌跡、最優軌跡及軌跡跟蹤

圖3:控制輸入信號
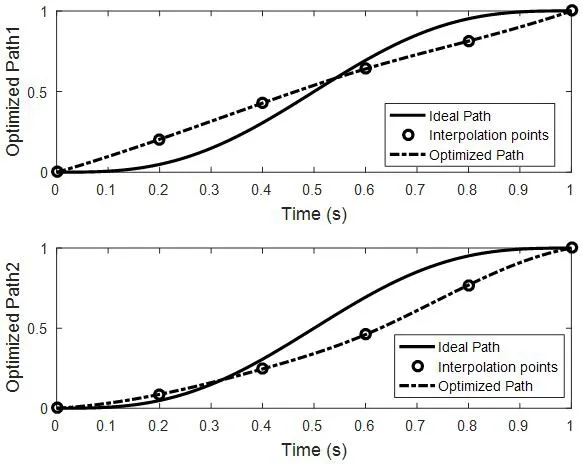
圖4:最優軌跡的優化效果
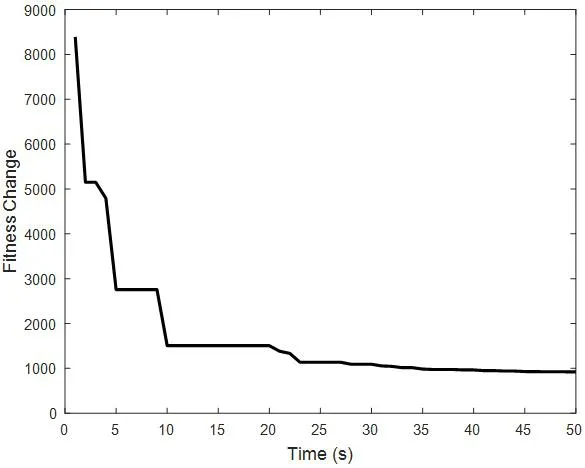
圖5:目標函數的優化過程


其中ωi為權值,τ為控制輸入信號,為實際軌跡與理想軌跡的差值。
針對雙關節機械手,總的目標函數為:

在這里控制輸入信號使用PD控制器:

其中e定義跟蹤誤差。
3 MATLAB仿真
雙關節機械手的動力學模型可描述為:

4 結語
經過算法優化可見,運行軌跡平穩,目標函數優化速度較快,機械手運行穩定,無抖動。在初始運動時由于重力作用,力學變化較為劇烈,所需調節輸入調整較多,這一部分可以通過調高采樣頻率使其更加平穩。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
公民與法治(2020年11期)2020-07-25 02:02:06
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41