鈾礦裂變中子測井控制與數據獲取技術
2019-11-16 06:01:38豐樹強張國光趙瀟蘇丹楊林森
電子技術與軟件工程 2019年20期
關鍵詞:深度
文/豐樹強 張國光 趙瀟 蘇丹 楊林森
當前,我國對核燃料的需求逐步增加,利用核輻射探測技術進行鈾礦勘探的測井方法應用前景廣闊。鈾礦裂變中子測井中,所有井下儀器密封在金屬探管中,與井上設備間通過唯一的絞車線纜連接;測井中,井下溫度可達最高120℃,儀器連續工作時間長,外部高溫環境與內部熱量都影響測井電路及器件的正常工作;探管外殼為不銹鋼材料,內部為鋁合金結構,用于結構支撐與儀器固定,內部狹窄的空間對測井電路的設計、布局以及散熱均提出了挑戰;絞車線纜長度達1km,井下儀器供電、控制與狀態傳輸、數據獲取均通過絞車線纜完成,通信距離長、干擾多,影響系統的穩定工作;利用脈沖中子源測井過程中,中子源的工作時序、探測器數據獲取時序、絞車控制等也需要緊密配合。
1 物理模型
鈾礦裂變中子測井技術中,測井探管內主要儀器有中子發生器模塊、超熱中子探測器模塊、熱中子探測器模塊、伽瑪探測器模塊、數據采集板等;其中中子發生器工作時產額大于1 X 108n/s,脈沖頻率2KHz,脈沖寬度40μS;中子探測器由He-3正比計數管、高壓電源、前放電路等模塊組成,伽瑪探測器由LaBr3(Ce3+)晶體及信號成形電路等模塊組成,超熱中子探測器體積Φ32 X 180mm;熱中子探測器體積Φ16 X 90mm;伽瑪探測器體積Φ50 X100mm;此外,探管內還有配套的高壓電源、低壓電源、信號成形電路,探測器通信板、數據采集板等;井上模塊主要有絞車及控制器;發電機、UPS電源、上位機控制與數據端;整套設備集成于改裝車內,系統示意圖如圖1所示。
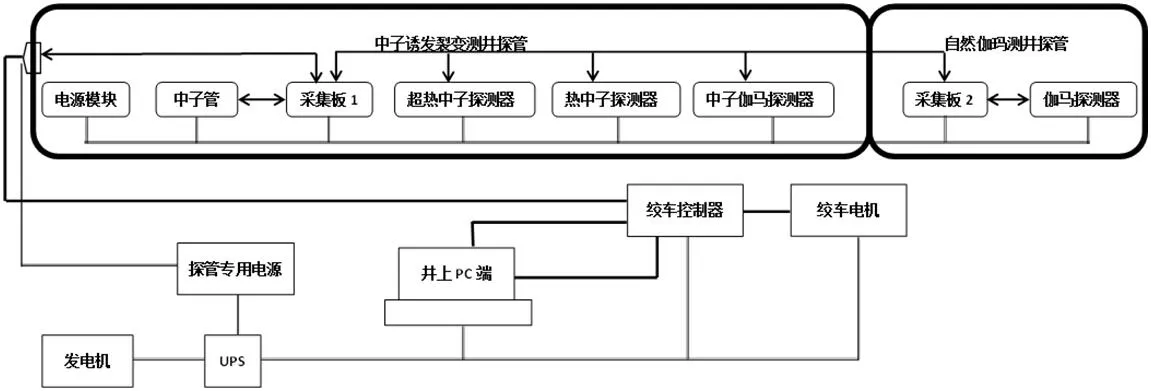
圖1:測井儀器組成示意圖

圖2:采集板電路示意圖與實物圖
2 系統設計
絞車線纜兩芯用于井下儀器供電,另外兩芯用于485串行通信,考慮到穩定性與通信效率,控制與數據獲取系統應由井下模塊與上位機模塊兩部分組成;其中,井下模塊完成中子發生器單元的底層控制、運行參數上傳、探測器譜數據的獲取與上傳等,上位機模塊完成絞車控制、深度數據獲取、采集流程的啟動與停止、譜數據的接收、反顯、存檔、解釋模塊調度等。485通信中,導線電感對信號的變化有阻礙作用,其感抗通過公式XL=2πf L0(其中,XL為感抗,f為頻率,L0是電感)計算,而
L0=μ0L(Ln2L/R-0.75)/2π,其中,L為導線長度,R為導線半徑,μ0為真空磁導率;經計算,波特率設為460800bps,考慮到開始位與停止位,每秒可傳輸46KB數據。
2.1 井下模塊
井下模塊的硬件部分是以單片機為核心的采集板,考慮到通信的實時性,中子發生器通信以及井上模塊通信通過獨立的485端口實現;多塊探測器通信板通過串接方式連接到485端口;采集板芯片選用汽車級器件,溫度適應范圍為-40℃至120℃;為保證譜數據傳輸速率,在空間布局上采集板與探測器通信板盡可能靠近。
采集板結構示意如圖2所示。
主控模塊完成設備初次加電后的初始化、參數設置,并設置串口通信中斷與定時器中斷,之后進入循環狀態,在循環體中完成數據存儲與看門狗置位;其中中子發生器控制、探測器通信、上位機模塊通信通過獨立的串口實現,定時器中斷用于檢測并處理串口數據及通信異常。
2.2 中子發生器驅動
脈沖中子發生器由中子管、高壓電源(靶高壓與離子源高壓)、燈絲恒流電源、驅動電路等部分組成。其中,驅動電路由FPGA、MCU及外圍數模電路、PWM電路組成,用于實現:
(1)靶高壓調整、頻率設置、氘氚放氣量控制;
(2)靶高壓反饋、靶電流反饋、離子源電流反饋;
(3)上位機控制通信。
工作時,燈絲恒流電路加熱氘氚儲氣裝置,產生氣體;離子源陽極加2000V脈沖高壓,氘氚混合氣體發生電離,之后,啟動靶高壓電源,高壓加到中子管加速系統及靶極,使電離后的氘氚離子加速并打靶,最終離子在靶內發生反應,產生中子。控制電路通過單片機采集同步信號,再經脈沖放大、保持、倍壓電路后產生陽極脈沖高壓,進而通過控制陽極脈沖高壓的通斷實現快速離子源電離,最終控制中子的產生與停止。
上位機模塊啟動后向采集板傳遞中子發生器控制參數,采集板將參數傳遞至中子發生器,流程啟動指令由上位機模塊發出,經采集板后傳遞給中子發生器驅動電路,后者啟動出束。驅動電路同時獲取靶高壓、靶電流、離子源電流等反饋信號,并被采集板獲取,最終反饋回上位機模塊。
2.3 探測器通信
探測器模塊包括(超)熱中子、中子伽瑪、自然伽瑪等探測器,分別用于獲取中子時間譜、中子伽瑪譜、自然伽瑪譜等;通信控制模塊則由FPGA、DSP、中子信號采樣接口、同步接口、485接口、電源接口及外圍元器件等定制電路組成。
所有中子探測器的輸出信號及中子發生器同步脈沖信號被通信模塊采集;FPGA根據同步脈沖信號控制多路中子探測器的記錄,信號經DSP處理后被上位機讀取;中子伽瑪與自然伽瑪通信模塊與此相似,由于自然伽瑪記錄過程中中子發生器不工作,無需同步信號。
從0時刻開始,在一個周期(2ms)中,源中子脈沖時間持續至40μs,源超熱中子衰減時間至 150μs,中子測量時間為 150μs-2000μs,而中子伽瑪非彈測量時間為0μs-10μs,俘獲測量時間為10μs-2000μs。其中,時間譜的總道數為128路,系統啟動后,通過上位機模塊軟件設定道寬參數并下發至采集板,后者通過485通信端口完成對探測器時間譜道寬的設定。
2.4 絞車、井上數據獲取控制及測井流程
絞車控制器配合電動絞車、測量頭及鎧甲線纜等,可在0-30m/min速度下在0-1000m范圍內控制探管升降。其中,測量頭用于計量測井深度,鎧甲線纜用于探管升降及井上供電與通信;絞車運轉時,線纜速度與深度被測量頭上的測量輪及光脈沖機構采集,數據經絞車控制器處理后發送至上位機模塊。
井上控制與數據獲取端包括采集板通信模塊、絞車通信模塊、譜數據解析與顯示模塊、文件處理模塊、流程控制模塊、異常處理模塊等。如圖3所示。

圖3:井上模塊軟件界面
軟件啟動后加載默認參數及刻度數據,執行初始化,向采集板傳遞中子發生器控制參數以及時間譜道寬參數,啟動自檢,之后進入等待狀態。
定點模式下,上位機模塊設定預置深度,啟動絞車,獲取絞車狀態,到達設定深度后,確認絞車停止狀態及反饋深度,下發啟動流程指令,采集板啟動存儲區及同步初始化,等待數據采集板反饋中子發生器狀態,獲取探測器譜數據,按照格式解析數據,按照刻度數據完成譜顯示;采集完成后,上位機模塊下發停止流程指令,采集板依次停止探測器獲取,停止中子發生器出束,完成所有數據上傳,清零;后者接收所有數據后,集成并打包深度數據、日期戳數據、中子發生器狀態數據、刻度數據,生成復合文檔。
恒速模式下,上位機模塊設定起點深度、終止深度、預設速度與步長;啟動流程,檢查并置位當前深度,低速啟動絞車電機,啟動后逐步提速至設定速度;到達起點深度后,下發啟動流程指令,獲取中子發生器參數,獲取譜數據,采集深度數據,深度達到步長值后,打包并保存數據,重復過程直至深度達到終止深度。
通常,下降測量時,開啟自然伽瑪探測器測量巖層的自然伽瑪能譜,中子管保存關閉,根據自然伽瑪能譜確定巖層的U,Th,K的含量曲線,并根據測井曲線的異常確定感興趣的測量區;提升測量時,中子發生器、中子探測器與中子伽馬探測器均工作,對自然伽瑪能譜異常的地層區間做重點測量。
3 探測器刻度及模型井實驗
利用Cs-137、Co-60及Th-232核素對伽瑪探測器進行線性刻度,通過刻度實驗,也驗證了采集板與探測器模塊、采集板與上位機模塊通信正常;具備了開展進一步實驗的條件。
整套測井儀集成于專用改裝車中,在模型標準井開展了實驗;主要完成測井儀在測井模型標準裝置上的校準實驗和鈾含量的線性、準確性驗證。通過實驗,也驗證了探管、上位機模塊、車載發電機與UPS、絞車控制系統的穩定性,具備了開展野外測井實驗的條件。
4 結論
本工作針對使用環境要求,完成了井下采集板的硬件設計、采集板控制與通信模塊的軟件設計與開發,完成了上位機模塊軟件的開發,整套系統的穩定性與可靠性在譜刻度實驗與模型標準井實驗中得到了驗證,關于系統進一步的測試有待通過野外測井實驗驗證。
猜你喜歡
中學生數理化·七年級數學人教版(2022年6期)2022-06-05 06:50:50
快樂學習報·教育周刊(2022年16期)2022-05-01 21:25:05
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
新聞傳播(2016年10期)2016-09-26 12:14:59
新聞傳播(2015年10期)2015-07-18 11:05:40
交通建設與管理(2015年15期)2015-03-20 15:18:57