基于改進雙向雙邊測距的超寬帶定位技術及應用研究
2019-11-16 11:06:27李小亭郎月新韋子輝張要發楊澤徐瀟瀟
中國測試 2019年10期
李小亭 郎月新 韋子輝 張要發 楊澤 徐瀟瀟
摘要:針對飛行時間(time of flight,TOF)定位速度慢的問題,提出一種改進雙向雙邊測距方法,結合距離差測量,只需一次測距就可以實現移動節點到多個固定參考節點的測距,進而提高TOF定位速度。設計超寬帶(ultra-wideband,UWB)定位實驗系統,完成改進雙向雙邊測距實驗驗證與定位精度測試,經測試定位精度達到分米級。改進的雙向雙邊測距方法可提高傳統TOF定位的定位速度,同時將該方法應用于過山車測速并結合卡爾曼濾波進行數據處理,為精確測量提供一個新角度。結果表明,采用四基站時定位時間約為原定位時間的1/4,能夠較好地測量高速運動物體的速度,具有很好的應用前景。
關鍵詞:雙向雙邊測距;飛行時間;到達時間差;UWB定位
中圖分類號:TP393 文獻標志碼:A 文章編號:1674-5124(2019)10-0021-07
收稿日期:2018-08-18;收到修改稿日期:2018-11-16
基金項目:國家重點研發計劃子任務(2016YFF0203103-3);保定南洋研究院一能源技術平臺項目(17H02)
作者簡介:李小亭(1957-),女,河北保定市人,教授,碩士,研究方向為測試計量理論及應用。
通信作者:韋子輝(1977-),男,河北保定市人,副教授,博士,主要研究方向為電磁場與微波測量、超寬帶定位。
0 引言
目前GPS、北斗定位導航技術已獲得廣泛應用,但由于建筑物遮擋無法應用于室內環境。隨著物聯網技術的發展,定位導航技術必然由室外延伸到室內,目前谷歌、微軟、蘋果、博通等在內的一些科技巨頭都開始布局室內定位技術。目前室內定位技術主要包括基于信號強度感知的WiFi、藍牙、ZigBee,最高可實現3~5m定位精度[1-3]。
為解決室內定位精度問題,IEEE802.15.4a-2007標準中建議采用信號飛行時間測量的定位技術,推薦的物理層通信技術為線性掃頻擴頻技術(chirp spread apectrum,CSS)和UWB定位技術[4-5]。無線信號頻域越寬、時域越窄,則測距精度及抗干擾能力越強UWB相對于CSS具有更高的帶寬,因此UWB技術定位精度及抗多徑干擾能力優于其他技術,目前超寬帶定位技術已成為室內定位的首選技術方案[6]。
超寬帶定位主要是采用TOF、到達時間差(timedifference of arrial,TDOA)定位方式,TDOA定位需要精確的時鐘同步,分為有線時鐘同步和無線時鐘同步兩種方式,有線時鐘同步需要設計同步信號裝置,無線時鐘同步需要設計時鐘同步算法,設計實現較為復雜。而TOF定位采用雙向雙邊測距測量標簽到多個基站距離,基站無需時鐘同步,多篇文獻介紹了TOF的應用研究情況,卞佳興等[7]分析了雙向雙邊測距誤差補償機制,盧靖宇等[8]應用雙向雙邊測距設計實現了一種機器人定位導航系統,TOF在多基站應用時,由于標簽需要和相鄰的多個基站測距,一次定位占用信道時間長,容易引起通信信號沖突。魏培等[9]提出了多基站測距和多標簽調度機制,解決標簽沖突和組網問題,設計了基于TOF的超寬帶室內定位系統,并應用于工業車間現場。方文浩等[10]針對這一問題提出區域判定策略,標簽通過判定所在區域,定位時只與區域內基站通信,避免重復地與未參與定位的基站建立連接,減少了節點間的無效通信。
TOF定位的主要缺點是定位時需要多次雙向雙邊測距,導致定位速度慢、標簽功耗大、與多基站測距時產生通信沖突。文獻[9-10]主要通過設計調度機制減少通信沖突,并沒有提高定位速度。本文提出一種改進雙向雙邊測距算法,一次雙向雙邊測距即可測量標簽到多個基站的距離、實現定位,大幅度提高了TOF定位速度,并采用Decawave公司的DW1000芯片設計了超寬帶定位實驗系統,對該方法進行測試及實驗驗證。
1 TOF定位技術與TDOA定位技術
TOF定位技術是通過測量無線信號的傳播時間來計算移動節點和固定節點間的距離。為減小晶振誤差造成的時間測量誤差,在IEEE802.15.4a-2007標準中建議采用雙向雙邊測距方法通過差分運算提高測距精度[5]。
通過差分運算可有效消除晶振誤差引起的時間測量誤差。使得通信節點在采用普通精度晶振的情況下,仍可獲得較高的時間測量精度。但雙向雙邊測距的主要缺點是需要多次收發無線信號完成測距,所需時間長。而一次二維定位至少需要三次測距,導致定位標簽功耗高,定位速度慢,容量小。這一缺點極大地限制了TOF定位的應用,目前在定位領域廣泛采用的是TDOA定位,TDOA定位只需標簽發射一次信號,即可實現定位,定位速度遠高于TOF定位,但TOF定位在定位區域和三維定位方面優于TDOA,在某些應用場合TDOA定位無法代替TOF定位[11]。
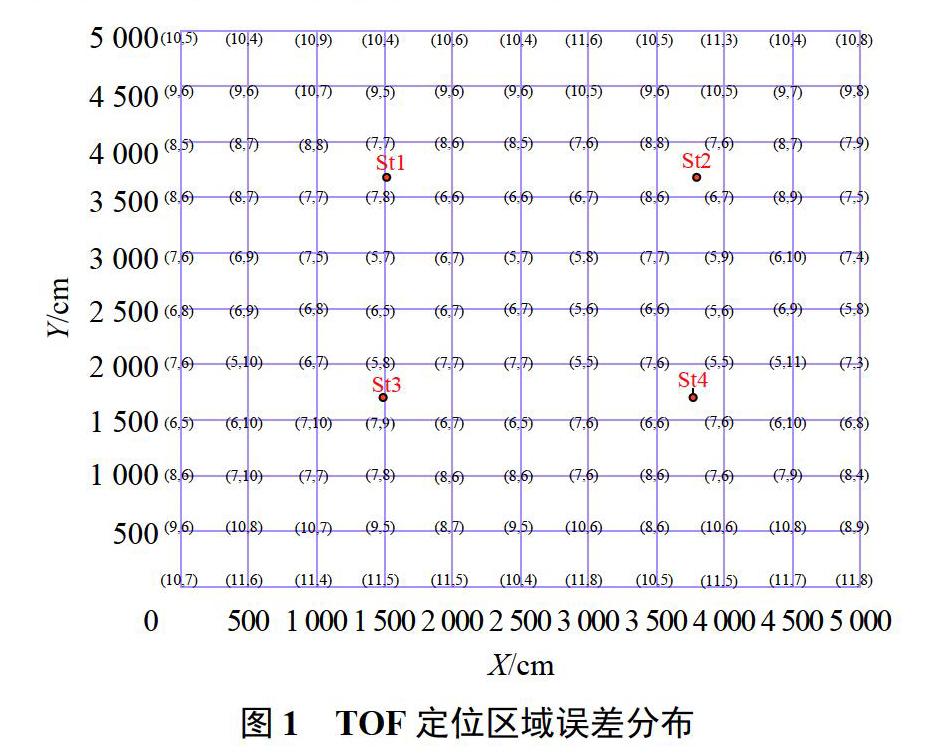
圖1為仿真計算得到的TOF定位誤差區域分布,St1、St2、st3、St4為定位基站,圖中選擇一點,計算得到該點到基站的距離,加上標準差為10的高斯噪聲,由距離求解非線性方程組計算坐標,并通過100次仿真計算統計加上測距噪聲的TOF定位誤差,圖形中的數字表示該點的TOF定位(X,Y)定位坐標誤差標準差,由圖1可見TOF定位基站區域外和區域內定位精度變化不大。
同樣過程對TDOA定位誤差進行仿真計算,采用泰勒級數展開法求解距離差的非線性方程組,圖2為TDOA定位誤差區域分布,可見基站區域外定位誤差明顯增大。因此同樣基站布局,TOF定位可定位范圍優勢明顯。另一方面TOF定位三維定位優于TDOA定位,TDOA定位為實現高度方向的距離差測量,必須要求基站安裝存在高度差,且高度差越大高度方向上的定位誤差越小,造成實際應用中安裝部署困難,而TOF定位不存在這個問題。基站安裝在同一水平面也可實現三維定位。
綜合以上分析TOF定位在定位區域,三維定位方面優于TDOA定位,TOF定位不需要時鐘同步,較TODA更容易實現,但定位速度慢是其主要缺點,這也限制了TOF定位的應用。
2 改進雙向雙邊測距算法
針對TOF定位速度慢的問題,在雙向雙邊測距算法基礎上改進算法,圖3中所示標簽與主基站A雙向雙邊測距的同時,實現標簽到主基站A和從基站B的距離差測量,通過距離和距離差計算標簽到從基站的距離。
如圖3所示,雙向雙邊測距算法由Signal1、Signal 2、Signal 3的發送接收完成,實現標簽到主基站A的測距,在雙向雙邊測距前標簽先發送一次廣播信號Signal 1',基站A、B均收到信號標簽發送的信號Signal 1'、Signal 1,從基站B也收到基站A發送的回復信號Signal 2。根據上述幾個信號接收時間值,即可計算標簽(Tag)到基站A、B的距離差。具體推導過程如下。
假設移動節點Tag到A、B基站的距離均不相等,所以A、B4個固定參考節點接收到信號1和信號2的時間也是不一樣的,其差值為△SAB/c(c為光速,△SAB是Tag到基站A、B距離差)。基站A接收到Signal 1'和Signal 1后,測量兩個信號接收時間τRA1、τRA2,計算接收時間差(τRA2-τRA1),從基站B接收到Signal 1'和Signal1后,測量兩個信號接收時間τRB1、τRB2,計算接收時間差(τRB2-τRB1),從物理角度出發,A、B4個固定參考節點接收信號Signal 1'和Signal 1時間間隔應該是一樣的,均應為圖中所示T1,那么測量值(τRA2-τRA1)、(τRB2-τRB1)應該相等,但是在實際中,A,B基站存在時鐘頻率偏差及接收時間測量誤差,不考慮接收時間測量誤差,計算A、B兩基站時鐘頻率偏差比值為
k=(τRA2-τRA1)/(τRB2-τRB1)
主基站A接收兩次廣播信號Signal 1'和Signal 1后,根據時間間隔測量值(τRA2-τRA I),以Signal 1接收時間τRA2為起點,延時一段時間在τSA3時刻發射信號3給從固定參考節點B,延時時間(τSA3-τRA2)取值盡量接近(τRA2-τRA1)。在主基站A發送的報文3中包含τRA1、τRA2、τSA3測量值。
如圖3所示,T3由節點B測量,測量值為(τRB3-τRB2),對應于節點A時鐘測量值為:
(τRB3-τRB2)×k(2)
SAB為基站A、B之間的距離,△SAB為標簽到主基站A、從基站B的距離差。
T2由A節點測量,其測量值為:
T2=τSA3-τRA2(4)
計算A,B兩節點接收信號的時間差為:
通過Tag和基站A、B之間的信號Signal 1'、Signal 2、Signal 3發送接收時間測量即可實現Tag和基站A、B的距離差△SAB測量。Tag和基站A之間通過信號Signal 1、Signal 2、Signal 3發送接收時間測量,參照圖1實現雙向雙邊測距,測量Tag和基站A的距離SA,根據SA,即可求得SB。
SB=SA-△SAB(6)
在從基站B的測距過程中,從基站B只接收信號,因此可以任意增加從基站的個數。采用一次改進雙向雙邊測距,測量標簽到主基站距離的同時,完成標簽到多個從基站距離測量,并且只是增加了一次信號發送,未增加過多通信開銷,實際應用中可大幅提高TOF定位速度。對于四基站TOF定位,定位時間縮短至原定位時間的1/4。
3 UWB定位實驗系統設計
為驗證算法可行性,設計UWB定位實驗系統,平臺節點采用Decawave公司推出的基于IR-UWB通信技術的DW1000射頻芯片,典型帶寬500MHz。采用脈沖位置調制和二進制相移鍵控調制方式。DW1000發射功率調整范圍-62~35dBm/MHz,采用雙向雙邊測距方法時110kb/s通信速率最大測距距離為290m,最高可實現0.1m測距精度,最大通信速率為6.8Mb/s。DW1000芯片內部集成63.8976GHz采樣時鐘,計時單位為15.65ps,保證了測距過程中的時間測量精度。發送數據幀格式參照IEEE802.15.4-2011標準,包括前導碼(preamblecode)、數據幀分隔符(start of frame delimiter,SFD)、數據幀頭(physical layer header,PHR)、數據區部分。芯片在發送數據時,可以記錄發送數據中PHR首字符發出時的時鐘計數,同樣接收時也可以測量記錄接收數據PHR首字符到達的采樣時鐘計數。測量精度達到100~150ps[6]。
DW1000可以采用延時發送機制,根據當前時鐘計數,設定延時時間,可以精確計算將要發送數據PHR首字符發出時的時鐘計數,并可將該時鐘計數值加入到數據包中,進而發送給接收方。以上功能保證了DW1000可以用來實現測量信號到達時間以及進行雙向雙邊測距的目的。
UWB定位系統如圖4所示,由標簽、基站、定位坐標計算服務器三層架構組成,標簽、基站均采用DW1000芯片,標簽設計考慮低功耗,采用MSP430系列單片機作為主控制器,基站采用Stm32處理器。定位基站通過交換機建立的局域網與定位服務器連接,通過TCP/IP協議與定位服務器實現數據傳輸。
TOF定位算法需要測量標簽到各固定基站的距離,由標簽發起與主基站A的改進雙向雙邊測距,同時完成距離差測量,如圖4所示測距過程中從基站只接收數據,因此從基站個數不受限制。各基站測量數據匯總到定位服務器,計算標簽到各從基站的距離,并通過求解非線性方程組計算定位坐標。
4 精度測試
在上述測試平臺下,采用改進雙向雙邊測距實現TOF定位,為縮短測距時間DW1000采用6.8Mb/s通信速率,完成一次改進雙向雙邊測距所需時間在1.8ms以內。如圖5所示,在室內環境6m×8m下,布置4個固定基站,高度是1m,并在室內視距條件下選取9個測量點,使標簽依次在測量點測試。
表1為標簽在改進雙向雙邊測距法下測得的距離值測量誤差。將標簽放置于選定測量點可得到主基站和各個從基站到標簽的距離標準差平均值,到從基站距離值由于距離差測量引入新的誤差,可以看出,標簽到從基站測距值標準差稍大。同時表中列出了各測距值的絕對偏差平均值,測距值均大于真實值,經過仔細校準后絕對偏差可進一步縮小。
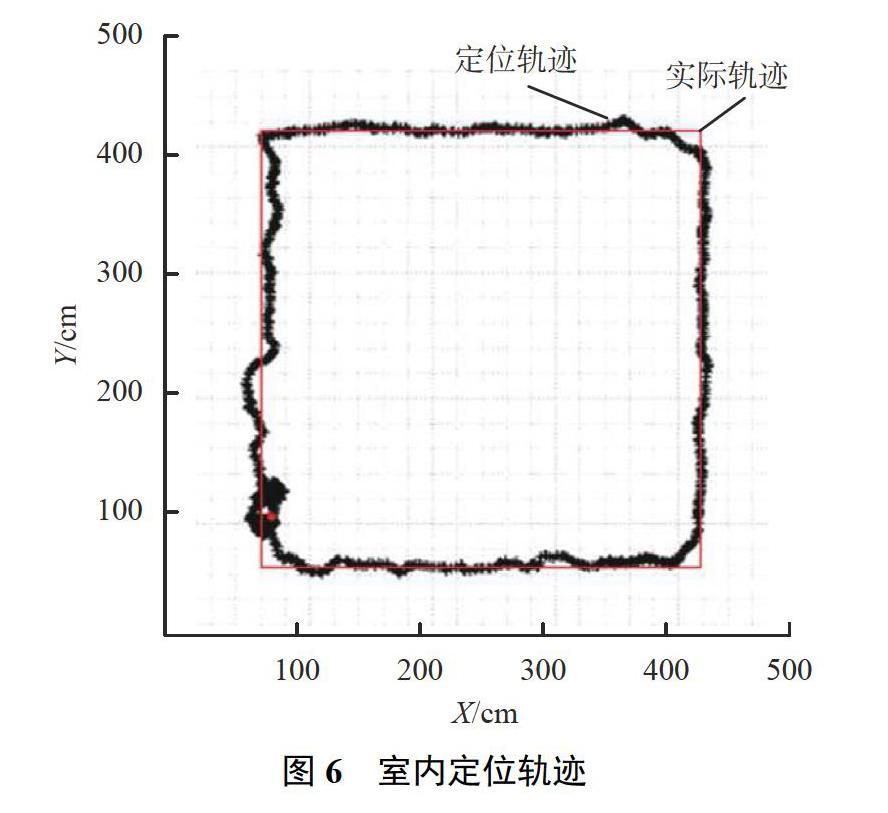
表2中列出所選取9點的定位誤差。定位標準偏差絕大多數在10cm以內,絕對偏差略大在30cm左右。圖6為標簽刷新率為40Hz時的室內定位軌跡,定位軌跡較好反映了實際軌跡,可滿足大多數室內定位應用精度要求。
圖6在5m×5m范圍下,測試人員持基站沿一定路徑行走,黑色軌跡代表基站移動位置,紅色線代表測試人員實際行走軌跡。結果基本在30cm內,軌跡波動不大。另外標簽天線方向對定位精度也有一定影響,主要是由于天線極化方向和天線群延時造成的。如果標簽天線方向不固定,定位誤差會進一步增大,在實際應用中需注意。采用圓極化天線可減小天線方向引起的誤差。
5 基于改進雙向雙邊測距的TOF定位在過山車測速中的應用
隨著人們生活水平提高,游樂設施行業得到了快速發展。同時,游樂設施關系到游客的安全,越來越受到人們的重視。過山車是一種依靠重力運行的游樂設施,最高速度可達100km/b。在開始運行階段,機械裝置將過山車送至最高點,之后,過山車依軌道實現自運行。由于軌道復雜、速度大,需要檢測過山車運動參數(比如速度、加速度),以保障游客安全。
5.1 基于超寬帶定位技術的過山車速度檢測方案
過山車運行區間大、運行速度快、運行軌跡復雜,普通過山車高度可達30~50m。傳統的測速方法如雷達測速等方法不能滿足要求。由于超寬帶具有抗多徑干擾、定位精度高的優點,在復雜環境下也能保持良好定位精度,因此可應用超寬帶定位技術通過三維定位計算過山車軌跡、速度、加速度。由于過山車運行快,最快時速達到百公里以上,對過山車進行測速,要求較高的定位刷新率。
采用改進雙向雙邊測距的TOF定位算法只需一次測距就可以實現移動節點到多個固定參考節點的測距,提高了TOF定位刷新率,并且4個基站可以部署在同一水平面即可實現三維測速,安裝方便。綜合以上分析,可將改進雙向雙邊測距的TOF定位算法應用于過山車測速中。
5.2 測速方案實施
選取裝備過山車的游樂園作為試驗場所。在過山車運行前,將定位標簽穩固在過山車座位上方(見圖7),避免信號遮擋增加測試準確度。過山車高速運行過程中有兩種典型運動,一種是從高處滑下的下落運動,另一種是在圓軌道上翻滾運動。在此選取高速下落運動進行定位測速分析。
根據實地搭建測速環境,4個基站定位區域為50m×20m,基站布置在覆蓋測試段長方形區域各個頂角處。4個定位基站、載有標簽的過山車和定位坐標計算服務器一起構成了超寬帶定位系統。當附有標簽的過山車經過4個基站覆蓋的測試區域時,系統根據測量數據計算過山車的運動軌跡和速度。
5.3 基于卡爾曼濾波算法的數據處理
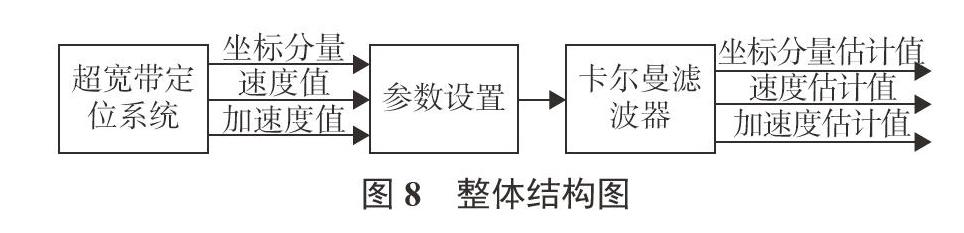
利用超寬帶系統采集的位置坐標信息可以繪出過山車從高處下落的軌跡,為提高測量的精度,采用卡爾曼濾波對測量數據進行處理。如圖8所示,是以卡爾曼濾波算法為基礎的整體結構流,將測量數據導入卡爾曼濾波器,并對初始位置信息等濾波器參數設置以達到理想要求[12]。
利用超寬帶系統采集的位置坐標信息可以繪出過山車從高處下落的軌跡如圖9,圖10所示。比較兩幅圖可以看出,經過卡爾曼濾波處理的軌跡相對于原始軌跡圖更光滑,降低了不確定的干擾,確保收集到的位置坐標信息能真實反映過山車的實際運行狀態。由經過卡爾曼濾波處理后的軌跡可以看出,過山車從最高端落下經過最低點后又上滑一段,在軌跡最底端有最大速度值。
同樣,利用過山車位置坐標信息可以繪出過山車從高處下落的速度圖,通過圖11、圖12可以看出,卡爾曼濾波后的速度圖與濾波前速度圖比較更有規律性。觀察濾波后的速度圖,過山車從高處落下時具有初始速度,速度隨下落距離增大而增大,到達底端獲得最大速度約87km/h。測量得到的軌跡和速度與廠家給出的數據基本吻合,說明了該方法的實用性。
6 結束語
TOF定位在定位區域、三維定位方面優于TDOA定位,TOF定位不需要時鐘同步,較TDOA更容易實現,但定位速度慢限制了TOF定位的應用,采用改進雙向雙邊測距的TOF定位可大幅提高TOF定位速度,采用四基站時,定位時間約為原定位時間的1/4,并且經實驗驗證可實現分米級的定位精度。為提高測量精度,結合UWB定位技術,用改進雙向雙邊測距的TOF定位在過山車測速中的測量方案進行設計,將卡爾曼濾波算法應用于過山車定位數據處理中。在游樂園里對過山車進行實驗,結果顯示該定位技術能夠較好地完成對高速運動物體速度的測量,具有很好的應用前景。
參考文獻
[1]盧偉軍,孫希延,紀元法,等.GPS偽衛星高精度室內定位技術研究與實現[J].電子技術應用,2018,44(3):36-39.
[2]裴凌,劉東輝,錢久超.室內定位技術與應用綜述[J].導航定位與授時,2017,4(3):1-10.
[3]阮陵,張翎,許越,等.室內定位:分類、方法與應用綜述[J].地理信息世界,2015,22(2):8-14.
[4]陳新科,喻川,文智力.UWB定位技術在煤礦井下的應用[J].煤炭科學技術,2018,46(S1):187-189.
[5]IEEE Computer Society.Wireless medium access control(MAC)and physical layer(PHY)specifications for low-ratewireless personal area networks(WPANs):IEEE Standard802.15.4a-2007[S].New York:IEEE,2007.
[6]韋子輝,馮正和,王志峰.脈沖超寬帶定位單元設計及應用測試[J].電視技術,2014,38(23):60-63.
[7]卞佳興,朱榮,陳玄.基于改進雙向測距到達時間差定位算法的超寬帶定位系統[J].計算機應用,2017,37(9):2496.
[8]盧靖宇,余文濤,趙新.基于超寬帶的移動機器人室內定位系統設計[J].電子技術應用,2017,43(5):23-28.
[9]魏培,姜平,賀晶晶,等.基于內三角形質心算法的超寬帶室內定位[J].計算機應用,2017,37(1):289-293.
[10]方文浩,陸陽,衛星.基于區域判定的超寬帶井下高精度定位[J].計算機應用,2018(3):1-7.
[11]FRESNO J M,ROBLES G,MARTINEZ-TARIFA J M,et al.Survey on the performance of source localizationalgorithms[J].Sensors(Base1),2017,17(11):2666.
[12]梁民贊,黃子豪,曹占啟.曲線擬合與卡爾曼濾波器的濾波精度評估[J].無線電工程,2013,43(3):36-39.
(編輯:譚玉龍)