吊具夾持機構(gòu)的結(jié)構(gòu)優(yōu)化研究
2019-11-16 11:06:27代春香孟令寬李三雁
中國測試 2019年10期
關(guān)鍵詞:結(jié)構(gòu)優(yōu)化
代春香 孟令寬 李三雁


摘要:為使吊具夾持機構(gòu)滿足載重工況的同時又盡可能降低自身質(zhì)量及體積,對其進行接觸應(yīng)力、結(jié)構(gòu)強度及優(yōu)化設(shè)計分析,并根據(jù)最優(yōu)設(shè)計參數(shù)作為制作夾持機構(gòu)實物的具體數(shù)據(jù),以實現(xiàn)對大直徑、高質(zhì)量、高溫度零件的吊裝。首先,該文采用Ansys Workbench建立夾持機構(gòu)的參數(shù)化有限元模型,并進行接觸分析,得出強度相對薄弱位置,進而提出改進和優(yōu)化方案。其次,建立夾持機構(gòu)的結(jié)構(gòu)優(yōu)化模型,采用零階優(yōu)化方法進行優(yōu)化處理,從而得到模型的最優(yōu)設(shè)計參數(shù)。從優(yōu)化結(jié)果可得,夾持機構(gòu)的比重較輕,夾持臂厚度變薄,而此時的最大綜合位移和最大等效應(yīng)力依然滿足設(shè)計要求。最后,以優(yōu)化分析結(jié)果作為夾持機構(gòu)的實物制作數(shù)據(jù)支撐,制作調(diào)試后的吊具現(xiàn)場使用狀況良好,效果比較理想,可驗證分析結(jié)果的準(zhǔn)確性。
關(guān)鍵詞:夾持機構(gòu);有限元模型;接觸分析;零階優(yōu)化方法;結(jié)構(gòu)優(yōu)化
中圖分類號:TH21 文獻標(biāo)志碼:A 文章編號:1674-5124(2019)10-0164-05
收稿日期:2018-12-14;收到修改稿日期:2019-02-03
作者簡介:代春香(1986-),女,四川遂寧市人,講師,碩士,研究方向為機械設(shè)計、機械電子工程。
通信作者:孟令寬(1987-),男,山東菏澤市人,碩士,研究方向為機械設(shè)計與制造。
0 引言
在國民經(jīng)濟建設(shè)、國防、航空航天和軍工業(yè)等諸多領(lǐng)域內(nèi)較為常見的重要機械設(shè)備,多采用多個空心結(jié)構(gòu)體層層嵌套組成的嵌套式伸縮結(jié)構(gòu)[1-2],在降低成本、提高生產(chǎn)效率、實現(xiàn)機械自動化等方面起著積極推動的作用。大型工程機械的結(jié)構(gòu)零件因需要承擔(dān)較大的載荷和抗彎能力,蔡宇子[3]通過對多種形狀截面的受力分析,得出不同的截面形狀可使伸縮臂在抗彎和抗扭等方面表現(xiàn)出不同的特點。王中要等[4]利用大型有限元分析軟件Ansys對固支梁受集中載荷工況時進行有限元分析,得出工字形截面梁比矩形截面梁的強度和剛度更好的結(jié)論。為防止承重件拉伸變形而失衡,在設(shè)計機械臂各個截面時,需要考慮多種因素,以使機械手更安全、穩(wěn)定的工作[5]。結(jié)合工作環(huán)境及工況,樊炳輝等[6]對管外行走機器人的進行優(yōu)化分析,設(shè)計出滿足夾緊力及剛度強度要求的抱緊機構(gòu)。單雪[7]通過彈塑性力學(xué)理論對嵌塊齒嵌入海洋基樁機理、嵌塊齒間海洋基樁重力分布和嵌塊齒受力應(yīng)力分布情況進行理論分析。
為了實現(xiàn)大直徑、高質(zhì)量、高溫度零件的吊裝,本文對某吊裝機械夾持機構(gòu)進行了優(yōu)化分析,該吊具的結(jié)構(gòu)圖如圖1所示,主要由吊具座、吊臂、夾持臂、夾持驅(qū)動機構(gòu)及縱向調(diào)整驅(qū)動機構(gòu)等組成。該機構(gòu)具有可夾持工件質(zhì)量大,起吊平穩(wěn),可在高溫環(huán)境下作業(yè),還可提高生產(chǎn)效率等優(yōu)點。由于要求該機構(gòu)吊裝平穩(wěn)高效可靠工作,因此,對其進行接觸分析并對結(jié)構(gòu)進行優(yōu)化是很有必要的,通過優(yōu)化分析,可以獲得更合理、更安全的機械參數(shù)。
本文根據(jù)吊具的初步設(shè)計參數(shù),以其中的夾持機構(gòu)為研究對象。借助Ansys Workbench軟件的參數(shù)化語言,建立該機構(gòu)的參數(shù)化有限元模型,分析該機構(gòu)的接觸強度;建立其優(yōu)化模型,采用零階優(yōu)化方法進行求解,得到最優(yōu)設(shè)計參數(shù),并以此為依據(jù)重新設(shè)計制作夾持機構(gòu)并應(yīng)用于工程實踐。
1 夾持機構(gòu)接觸有限元分析
1.1 夾持機構(gòu)的有限元模型
夾持機構(gòu)的等效三維模型如圖2所示,其結(jié)構(gòu)上分為吊臂和夾持臂,夾持臂通過電機驅(qū)動沿導(dǎo)向槽在吊臂上滑動以實現(xiàn)縱向夾持間距的調(diào)整。
本文應(yīng)用彈塑性增量理論[8]的非線性有限元法來計算吊臂與夾持臂接觸面區(qū)域的應(yīng)力,假設(shè)彈性變形和塑性變形之間沒有耦合的情況。根據(jù)增量本構(gòu)關(guān)系的形式和簡單加載定理,應(yīng)力和應(yīng)變之間可寫成全量關(guān)系,由彈性應(yīng)變率和塑性應(yīng)變率推導(dǎo)出模型方程可由應(yīng)變分解關(guān)系、平衡方程、幾何方程和本構(gòu)關(guān)系等組成。
1)分解關(guān)系
其中εijel為彈性應(yīng)變,εijpl為塑性應(yīng)變,εij(i,j=1,2,3)表示點在正交坐標(biāo)3個方向的應(yīng)變分量。
2)平衡方程
σij,i+Fi=0(2)
其中σij,i為應(yīng)力率場,F(xiàn)i為體力率。
3)幾何方程
其中:εij為應(yīng)變率場,ui,j、uj,i為運行速度場。
4)本構(gòu)關(guān)系
其中sij為偏應(yīng)力張量,σ/epl為應(yīng)力應(yīng)變曲線數(shù)據(jù),eijpl為偏塑性應(yīng)變張量,σij為應(yīng)力分量,v為泊松比,E為彈性模量。
在Ansys中建立夾持機構(gòu)的三維模型,并對吊臂和夾持臂接觸面進行如下設(shè)置:材料彈性模量E=2.06×1011Pa,密度ρ=7.8×103kg/m3,泊松比v=0.3,以及相關(guān)的滑動摩擦系數(shù)f=0.13。設(shè)置后的模型如圖3所示,水平方向深色的吊臂和豎起方向淺灰色夾持臂相接觸并在工作中會相互移動,吊臂和夾持臂相對滑動的表面分別是設(shè)定為接觸面和被接觸面。
采用SOLID45三維實體單元對該模型劃分有限元網(wǎng)格,共122245個單元,31560個節(jié)點,所施加的邊界條件共有A~E5個。具體字母參數(shù)及其編號所在位置見圖4,其中,A:夾持臂夾持工件時所受夾持反力2000N;B:重力加速度9806.6mm·s-2:C:由工件重力所施加的遠程力12500N;D:吊臂接口處的對稱約束;E:吊臂工字型梁處的固定約束。
1.2 模型的接觸分析
很早學(xué)者們就開始重視接觸問題的研究,瓦倫丁[9]在Hertz研究的彈性體接觸問題和相關(guān)接觸理論的基礎(chǔ)上,深入研究了接觸力學(xué)與摩擦學(xué)的相關(guān)原理及其應(yīng)用。顏尚君[10]通過對大功率結(jié)構(gòu)件的接觸狀態(tài)有限元分析并進行應(yīng)力計算,趙懷璧[11]運用元模型設(shè)計方法建立關(guān)鍵零部件的模型,進行受力分析和有限元方法分析。
本文采用有限元法在Ansys Workbench中進行面一面非線性接觸應(yīng)力分析,得到計算工況下夾持機構(gòu)的綜合位移云圖、等效應(yīng)力云圖和接觸應(yīng)力云圖,分別如圖5~圖7所示。
根據(jù)圖中結(jié)果可知,該機構(gòu)的最大變形位置在夾持臂底端,值為8.425mm;最大等效應(yīng)力位于吊臂和夾持臂連接處,值為117.67MPa,其強度相對比較薄弱;接觸行為中伴隨較高的應(yīng)力集中,最大接觸應(yīng)力位于相對滑動槽處,值為23.14MPa。由于該機構(gòu)最大應(yīng)力出現(xiàn)在吊臂和夾持臂連接處,根據(jù)工程實踐經(jīng)驗,可以采用添加筋板的方式進行局部加強,且可以針對夾持機構(gòu)各結(jié)構(gòu)參數(shù)進行進一步優(yōu)化,以達到輕量化的目的。
2 夾持機構(gòu)結(jié)構(gòu)優(yōu)化分析
2.1 結(jié)構(gòu)改進措施
根據(jù)夾持機構(gòu)運動范圍及對應(yīng)位置的相關(guān)狀態(tài),對其標(biāo)準(zhǔn)工況下的綜合位移、等效應(yīng)力和總質(zhì)量進行優(yōu)化分析。
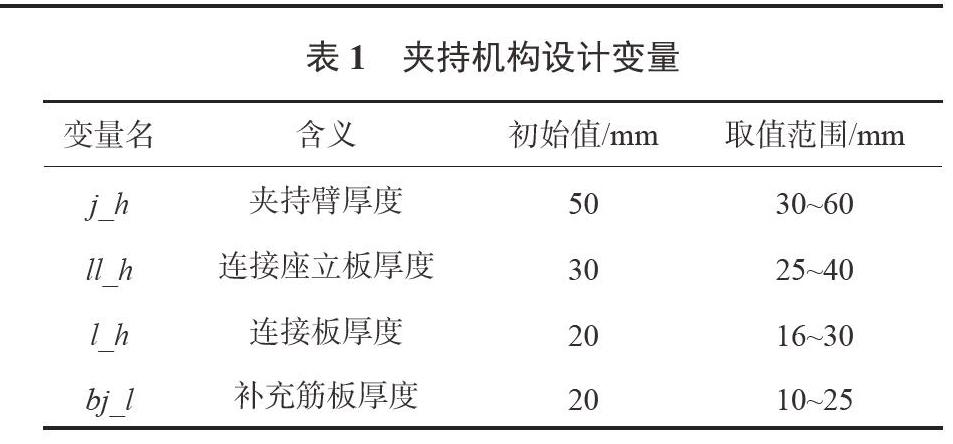
首先,設(shè)置夾持機構(gòu)關(guān)鍵部分的結(jié)構(gòu)參數(shù)為設(shè)計變量,可知其綜合位移x主要是關(guān)于設(shè)計變量如夾持臂厚度、連接座立板厚度、連接板厚度和補充筋板厚度的方程:
x=(j_h,ll_h,l_h,bj_h)(6)
設(shè)計變量的初始值及取值范圍如表1所示。
其次,為保證夾持機構(gòu)的剛度與強度要求,取其最大綜合位移和最大等效應(yīng)力為狀態(tài)變量[12].
ymax(x)≤y0,σmax(x)≤σ0(7)
式中:y0——初始設(shè)計時機構(gòu)的最大綜合位移;
σ0——初始設(shè)計時機構(gòu)的最大等效應(yīng)力;
ymax(x)每次迭代的最大綜合位移;
σmax(x)每次迭代的最大等效應(yīng)力。
最后,取夾持機構(gòu)總體積為優(yōu)化目標(biāo),從而實現(xiàn)夾持機構(gòu)總質(zhì)量的優(yōu)化,目標(biāo)函數(shù)為
f(x)=Usum(x)(8)
其中Vsum(x)為優(yōu)化過程中每次迭代的總體積。
因此,夾持機構(gòu)結(jié)構(gòu)優(yōu)化的數(shù)學(xué)模型可表達為
y(x)≤y0
σ(x)≤σ0
minf(x)
2.2 優(yōu)化前后數(shù)據(jù)對比
為了對關(guān)鍵部件進行參數(shù)優(yōu)化設(shè)計,王奎洋等[13]運用Ansys軟件對葉片進行強度分析和模態(tài)分析,楊瑞峰等[14]通過結(jié)構(gòu)優(yōu)化與有限元分析,運用零階優(yōu)化算法對其彈性桿進行優(yōu)化設(shè)計。現(xiàn)根據(jù)結(jié)構(gòu)優(yōu)化的數(shù)學(xué)模型,建立夾持機構(gòu)的優(yōu)化設(shè)計模型,采用零階優(yōu)化方法對該結(jié)構(gòu)進行優(yōu)化分析。當(dāng)求解程序迭代至第11步時收斂,圖8所示為目標(biāo)函數(shù)的迭代曲線,圖9所示為狀態(tài)變量的迭代曲線。
優(yōu)化后此夾持機構(gòu)的最優(yōu)設(shè)計參數(shù)如表2所示。由表可知,機構(gòu)的關(guān)鍵零件的厚度都有所降低,夾持臂厚度降低了20%,連接座立板厚度降低了17%,連接板厚度降低了10%,補充筋板厚度降低了50%。
2.3 優(yōu)化結(jié)果分析
結(jié)構(gòu)優(yōu)化后,夾持機構(gòu)的實際質(zhì)量為766.6kg,相對優(yōu)化前減輕了12.5%,其中夾持臂厚度由50mm優(yōu)化至40mm,優(yōu)化后最大綜合位移和最大等效應(yīng)力依然滿足設(shè)計要求,可見優(yōu)化效果良好。
3 優(yōu)化后的夾持機構(gòu)
以分析和優(yōu)化結(jié)果作為吊具機構(gòu)結(jié)構(gòu)設(shè)計的依據(jù),并修正夾持機構(gòu)的結(jié)構(gòu)設(shè)計參數(shù),進行設(shè)備制作,制作完成后的夾持機構(gòu)實物如圖10所示。該吊具已在某熱處理行業(yè)中投入使用,對經(jīng)過高溫加熱或者帶腐蝕的大尺寸坯料進行搬運,實現(xiàn)了普通吊夾具無法完成的工況,且吊裝現(xiàn)場使用效果良好,未見機械強度剛度方面異常問題,驗證了分析結(jié)果的準(zhǔn)確性。
4 結(jié)束語
為了高效吊裝大直徑、高質(zhì)量、高溫度的圓柱形工件,對所設(shè)計的夾持機構(gòu)進行接觸分析及結(jié)構(gòu)優(yōu)化分析;在Ansys軟件中建立了夾持機構(gòu)參數(shù)化有限元模型,并對初始設(shè)計參數(shù)下的機構(gòu)進行接觸有限元分析,得出機構(gòu)相對薄弱位置和進一步的改進優(yōu)化方案。為實現(xiàn)夾持機構(gòu)的輕量化目的,建立了夾持系統(tǒng)的優(yōu)化模型,并采用零階優(yōu)化方法進行求解。結(jié)果表明,在結(jié)構(gòu)強度滿足設(shè)計要求的情況下,優(yōu)化后機構(gòu)的質(zhì)量減輕了12.5%;根據(jù)優(yōu)化求解得到的最優(yōu)設(shè)計參數(shù),重新設(shè)計并制作了夾持機構(gòu),并付諸使用,使用可靠且情況良好。
參考文獻
[1]薛盼.汽車起重機臂架結(jié)構(gòu)分析與優(yōu)化設(shè)計研究[D].蘭州:蘭州理工大學(xué), 2011.
[2]程鵬.汽車起重機伸縮臂有限元分析及優(yōu)化設(shè)計研究[D].太原:太原科技大學(xué),2012.
[3]蔡宇子.現(xiàn)代伸縮臂截面及尺寸優(yōu)化研究[D].大連:大連理工大學(xué),2012.
[4]王中要,郭秀文.基于ANSYS的梁結(jié)構(gòu)有限元分析[J].公路,2009(7):159-161.
[5]高微,楊中平,趙榮飛,等.機械手臂結(jié)構(gòu)優(yōu)化設(shè)計[J].機械設(shè)計與制造,2006(1):13-15.
[6]樊炳輝,付秀強,高圣志,等.管外行走機器人抱緊機構(gòu)的優(yōu)化設(shè)計[J].機械設(shè)計與制造,2018(11):146-149.
[7]單雪.海洋基樁翻轉(zhuǎn)夾具夾持機理分析與裝置研究[D].哈爾濱:哈爾濱工程大學(xué),2017.
[8]王仁,黃文彬.塑性力學(xué)引論(修訂版)[M].北京:北京大學(xué)出版社,1992:130-142.
[9]瓦倫丁,L.波波夫.接觸力學(xué)與摩擦學(xué)的原理及其應(yīng)用[M].李強,雒建斌,譯.北京:北京大學(xué)出版社,2011:41-52.
[10]顏尚君,李錄平,周曙明,等.大功率汽輪機末級輪盤-葉片結(jié)構(gòu)接觸狀態(tài)有限元分析[J].汽輪機技術(shù),2018,60(3):185-188.
[11]趙懷璧.夾鉗式鋼坯吊具的優(yōu)化及集成設(shè)計研究[D].北京:華北電力大學(xué),2012.
[12]孟令寬,陳曉渝,錢烽,等.液壓糾偏機構(gòu)強度分析及結(jié)構(gòu)優(yōu)化[J].機械研究與應(yīng)用,2014,134(27):113-115.
[13]王奎洋,陳炯,唐金花.車用液力緩速器關(guān)鍵部件設(shè)計與有限元分析[J].中國測試,2014,40(6):141-144.
[14]楊瑞峰,劉志凱,郭晨霞,等.負載模擬器彈性桿的結(jié)構(gòu)優(yōu)化與有限元分析[J].中國測試,2016,42(5):119-123.
(編輯:商丹丹)
猜你喜歡
現(xiàn)代商貿(mào)工業(yè)(2016年5期)2016-12-26 18:14:17
商業(yè)經(jīng)濟(2016年3期)2016-12-23 13:33:51
電子技術(shù)與軟件工程(2016年20期)2016-12-21 11:32:35
價值工程(2016年32期)2016-12-20 20:30:37
中國高新技術(shù)企業(yè)(2016年30期)2016-12-20 03:40:28
旅游世界·旅游發(fā)展研究(2016年3期)2016-12-12 14:00:28
科技視界(2016年18期)2016-11-03 20:33:59
中國科技博覽(2016年18期)2016-10-19 10:38:31
中國市場(2016年33期)2016-10-18 14:10:51
中國市場(2016年33期)2016-10-18 14:03:59