基于Leica TS60測量機器人的自動放樣測量系統開發
2019-11-19 08:12:44朱書敏楊雪峰劉成龍
四川建筑 2019年5期
朱書敏,楊雪峰,王 永,劉成龍
(1.廣東省長大公路工程有限公司,廣東廣州 5114311;2.西南交通大學地球科學與環境工程學院,四川成都 611756;3.西南交通大學高速鐵路運營安全空間信息技術國家地方聯合工程實驗室,四川成都 611756)
放樣測量是按照一定的精度要求將樁基、索夾、管線等建筑物或構筑物的設計平面坐標和高程標注在實地的過程。該項工作貫穿于土木工程建設的整個期間,作為工程施工建設的紐帶,將各個環節非常緊密地銜接在一起。一旦放樣點位置確定后,即可根據放樣點位置進行填挖、設備安裝、混凝土澆筑等一系列施工工作。如果放樣點位置出錯或未達到相應的精度要求,即使之后發現了問題也將難以修正,造成極大的經濟損失。傳統放樣測量通常采用全站儀和水準儀等儀器根據放樣點設計坐標和高程分別進行測設,人工計算出調整量和調整方向,通過反復地調整和測量直至放樣點實測平面坐標和高程均達到設計精度要求。傳統放樣測量方法過程較為繁瑣,并且人工計算容易出現錯誤,如果不能被及時發現,則會造成不可挽回的嚴重后果。
現代放樣測量需要自動化觀測和計算,利用掌上電腦[1](PDA)開發控制測量機器人[2]的測量程序,可以實現放樣點自動搜索和精確照準、調整量自動計算、合格放樣結果自動保存等多種功能。PDA具有體積小、可靠性高、功能強大、價格便宜、操作簡單、適合隨身攜帶、供電時間長等多種優點,非常適合測量人員在野外進行操控和數據結果的實時處理。采用測量機器人在幾百米的小范圍內進行高程放樣測量同樣可以達到很高的精度,這也為基于測量機器人進行三維放樣測量研究提供了基礎。與傳統的放樣測量方法相比,采用PDA在線控制測量機器人的現代放樣測量方法可以較大程度提高放樣測量效率且減少人工干預,將繁雜枯燥的計算工作由軟件自動完成,從而減輕測量人員的勞動強度并避免錯誤的發生。因此,本文結合Leica測量機器人二次開發技術[3],基于Leica TS60測量機器人研制了一套適用于二維和三維固定測站和自由設站[4-5]多種測量模式的自動放樣測量系統ALS(Automatic Lofting System),下面詳細介紹該系統的研制過程。
1 ALS系統
根據現代放樣測量自動化、實時化的發展需求和特點,ALS應滿足工程施工建設期間多種自動化放樣需求。系統應能夠控制測量機器人在固定控制點或自由設站點進行放樣測量,從而解決工程施工過程中因車輛和臨時堆積材料等因素所造成的控制點架站無法直接測定某些點位的視線阻礙問題。并且,根據二維平面放樣和三維空間放樣的不同需要,自由設站測量設站點和放樣點坐標的計算方法也應不同。ALS應實現的具體功能如下:
(1)安裝在PDA上的放樣測量軟件應能夠與測量機器人采用串口或藍牙方式[6]進行通信,通過軟件可以方便快捷地對測量機器人進行各項操作控制,例如讀取和設置儀器氣象參數和測距模式等。
(2)放樣測量開始前,軟件應能夠讀取存儲在PDA內存中包含控制點和放樣點點名和設計坐標信息的文件,同時軟件還應允許外業測量過程中臨時增加控制點或放樣點坐標信息。
(3)放樣測量系統應能夠實現固定測站和自由設站多種測量模式下二維或三維放樣測量。
(4)在設站完成后,應采用極坐標測量方法進行放樣測量。為提高放樣測量效率,放樣測量系統應能夠根據放樣點和后視點之間的設計坐標位置關系,實現點選某一放樣點測量機器人即可自動旋轉指向到該點設計位置的功能。
(5)當放樣結果滿足設計精度要求后,放樣測量系統應能夠對合格數據進行實時保存,從而保證測量數據安全可靠,避免造成測量數據丟失。
2 ALS系統軟件研制
由于放樣測量往往不能在同一位置完成,需要經常搬站。因此采用便攜式PDA在線控制測量機器人進行自動化放樣測量是一種合理的方式。ALS以Leica測量機器人二次開發技術和計算機開發工具和語言[7]為基礎,以Leica TS60測量機器人和PDA等硬件為支撐,能夠實現多種模式設站、放樣點自動照準測量、放樣點調整量實時計算、合格放樣數據自動保存等功能,下面將詳細介紹ALS軟件研制的實現過程。
2.1 軟件實現流程
ALS軟件設計的基本思路為:
(1)設置測量機器人與PDA的通信參數一致以完成聯機通信。
(2)設置測量機器人的測距模式和氣象參數,并選擇相應的設站模式。
(3)將存儲在PDA內存中的測量文件建立的后視點和放樣點設計坐標信息導入軟件。
(4)測量后視點并通過軟件自動計算設站點坐標和精度以完成自由設站或固定測站后視定向。
(5)當設站點坐標精度符合要求后,點選某放樣點完成放樣點自動測量及調整量的實時計算。
(6)將滿足放樣精度要求的放樣點實測坐標自動保存在PDA內存中以便于后續導出查看和管理,ALS軟件功能實現流程框圖如圖1所示。
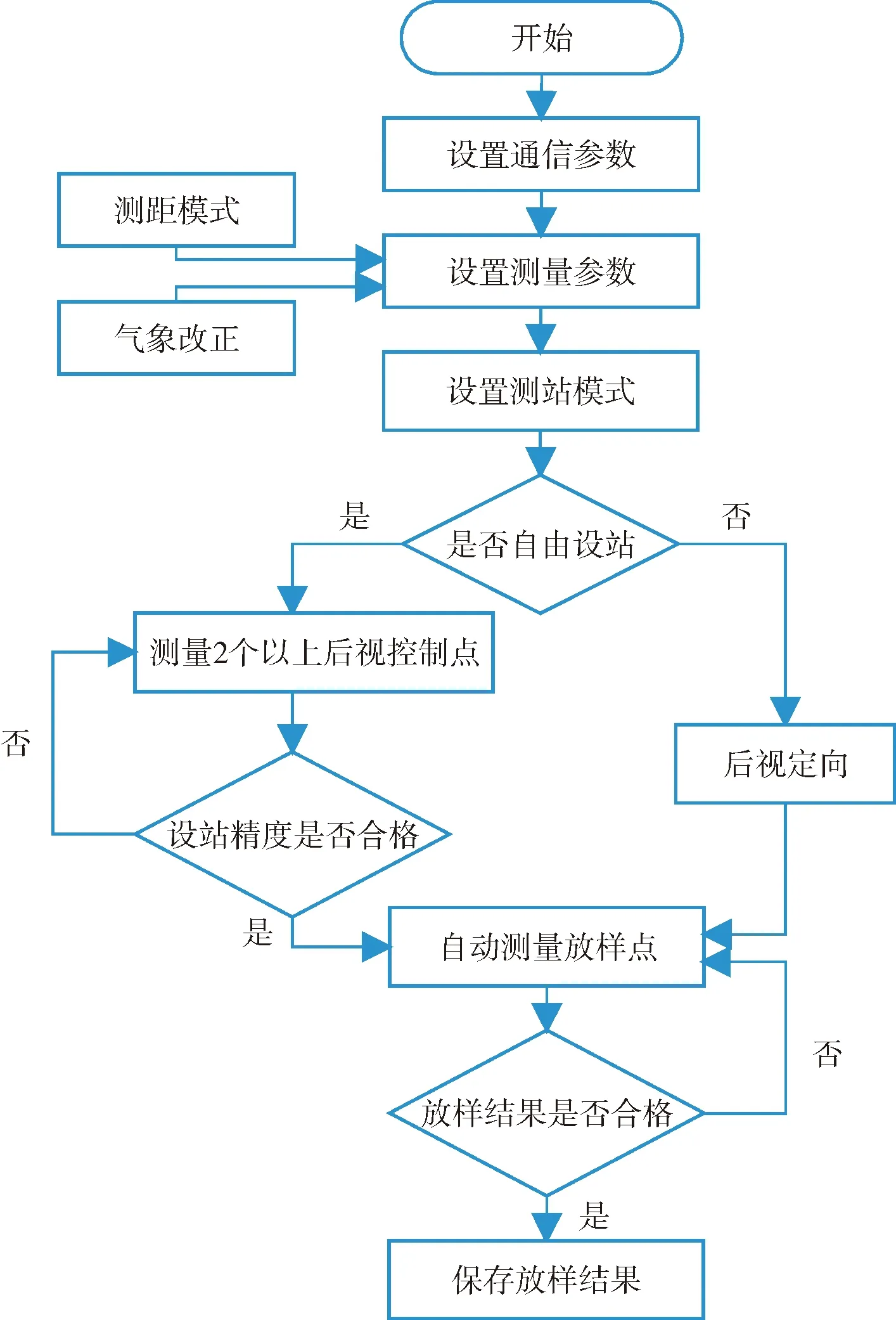
圖1 ALS軟件功能實現流程
2.2 軟件功能設計
依照圖1中 ALS軟件功能實現流程,并以簡便、實用為原則,設計了ALS軟件的4個功能模塊,分別為參數設置、導入設計、儀器設站、放樣測量。
2.2.1 參數設置
設置PDA串口通信參數,如端口名、波特率、數據位、停止位、校驗位等與測量機器人一致;設置測量機器人的測距模式和氣象參數;選擇二維或三維固定測站和自由設站中的一種模式。
2.2.2 導入設計
將存儲在PDA內存中由測量文件建立的后視點和放樣點設計坐標信息導入軟件。同時,軟件還允許用戶臨時增加后視點和放樣點設計坐標信息。
2.2.3 儀器設站
固定測站測量模式需首先進行后視定向,即將儀器大致照準某一后視點并進行自動照準測量;自由設站測量模式需觀測至少2個以上的后視點以完成自由設站點坐標和精度的平差計算,若設站精度不合格,還應重新架設儀器或觀測其他后視點再次進行設站。
2.2.4 放樣測量
儀器設站完成后,通過點選某一放樣點,軟件即可控制測量機器人望遠鏡自動旋轉到該放樣點設計位置的方向。測量機器人自動照準并測量該放樣點后,軟件可以自動計算該放樣點實測坐標相對于其設計坐標的調整量。當放樣結果滿足要求后,可將合格的放樣數據保存到PDA內存中,避免傳統手工記錄容易出錯和繁瑣的缺點,同時提高放樣測量數據處理的工作效率。
2.3 軟件功能實現
結合ALS軟件實現流程與功能設計,下面介紹ALS軟件界面設計和功能模塊的編程實現。
2.3.1 參數設置
首先,配置PDA與測量機器人的通信參數一致,從而通過數據電纜或藍牙方式建立PDA與測量機器人之間的物理連接數據鏈;然后,讀取或設定測量機器人的測距模式和氣象參數;最后,選擇一種設站模式即完成全部參數設置,參數設置界面如圖2所示。
2.3.2 導入設計
在參數設置完成后,即可將后視點和放樣點設計坐標信息導入軟件。設計坐標信息的導入有兩種方式,一種是點擊導入按鈕,將存儲在PDA內存中按照指定格式編輯的設計坐標信息文件直接導入軟件;另一種是在增加設計坐標信息的數據錄入框中輸入需要增加的點名和設計坐標,點擊增加按鈕逐點逐行地增加設計坐標信息,三維設站導入設計坐標信息界面分別如圖3所示。
2.3.3 儀器設站
儀器設站分為固定測站和自由設站兩種測量模式,通過點擊軟件底部標簽可以進入相應的設站界面。固定測站測量模式首先應選擇測站名和后視點名(三維固定測站測量模式還應在觀測后視點之前輸入儀器高),然后旋轉測量機器人大致照準所選后視點方向,點擊測量按鈕測量機器人即可完成后視點自動照準和測量,并將觀測數據顯示在軟件中。自由設站測量模式需測量2個以上的后視點進行設站,首先應輸入設站名并逐一選擇后視點進行觀測(三維自由設站測量模式還應在觀測后視點之前輸入后視點目標高),后視點觀測數據顯示在軟件表格中。當所有后視點觀測完成后,點擊設站按鈕,軟件即可自動計算并顯示自由設站點約束平差后的坐標和精度。如果設站精度不滿足要求,還應重新進行設站。固定測站測量和自由設站測量界面分別如圖4、圖5所示。
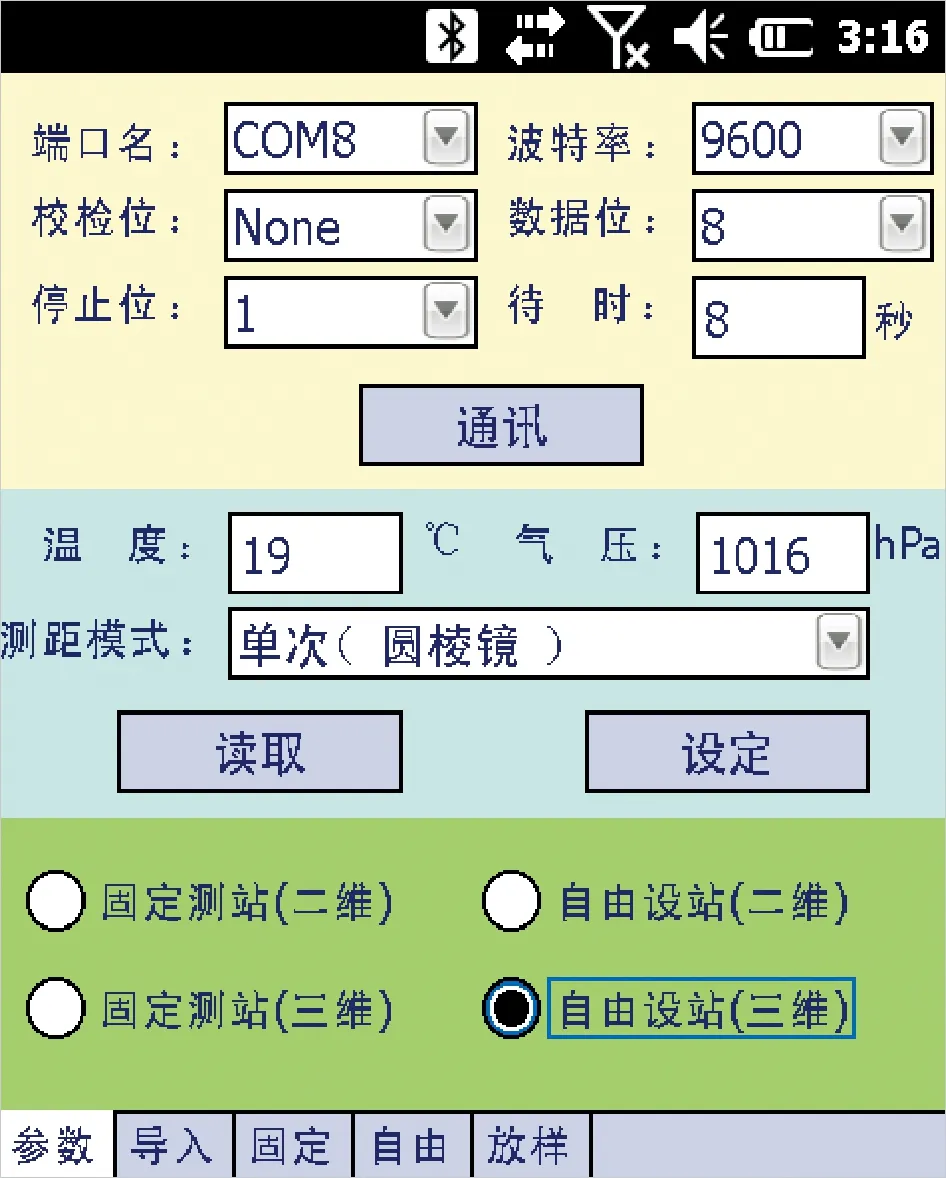
圖2 參數設置界面
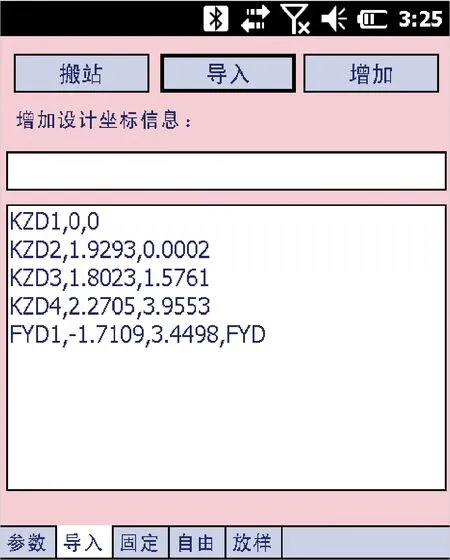
圖3 三維設站導入設計坐標信息界面
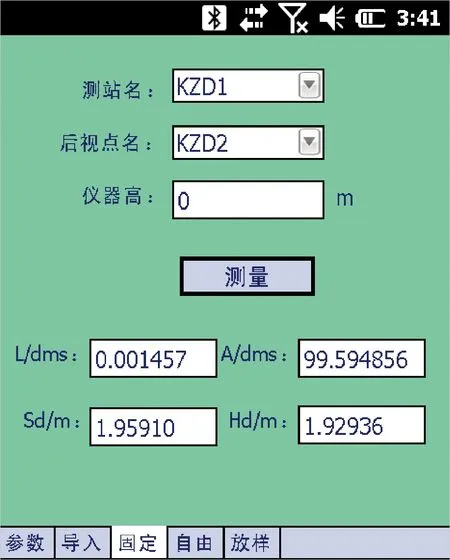
圖4 固定測站測量界面
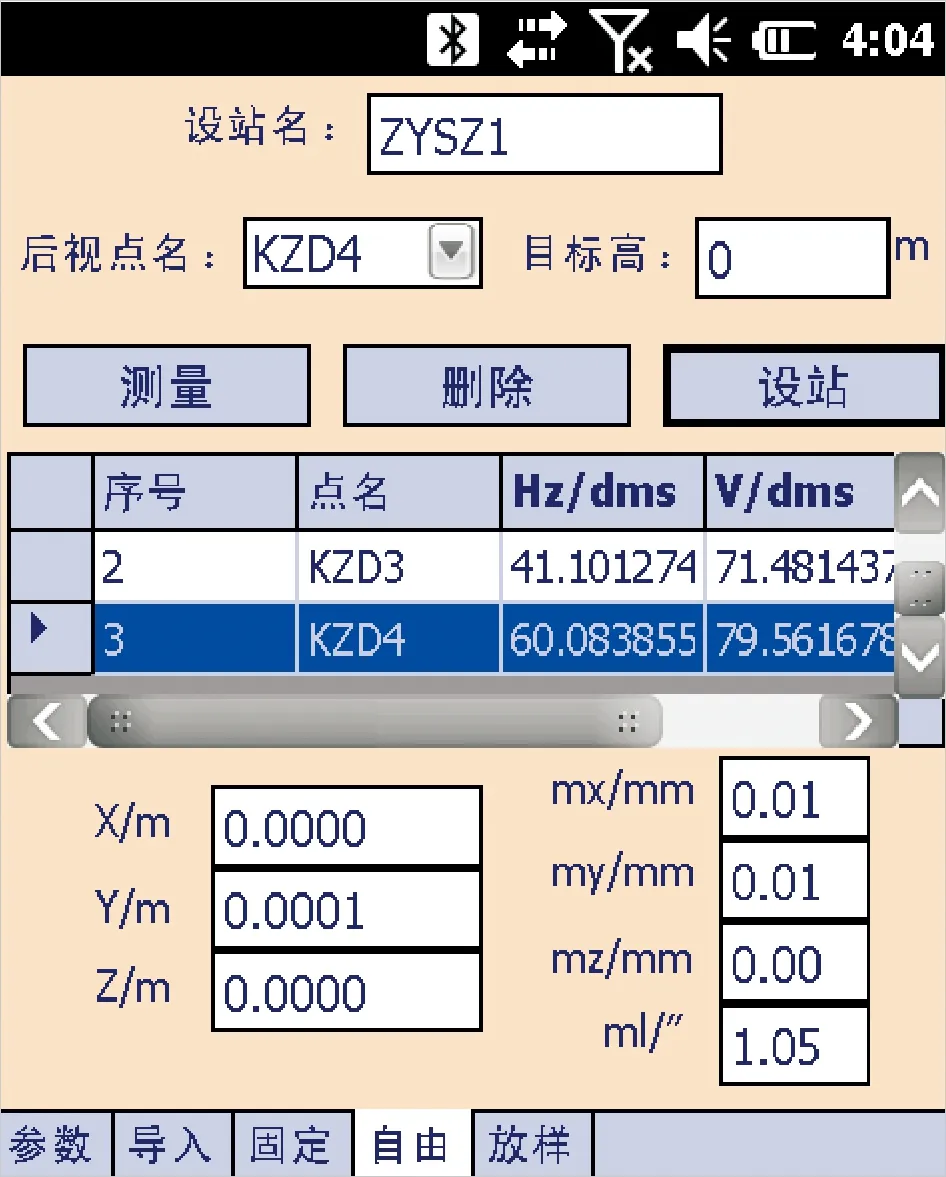
圖5 自由設站測量界面
2.3.4 放樣測量
在儀器設站完成后,可以開始進行放樣測量。選擇某一放樣點名,測量機器人望遠鏡即可自動旋轉到該放樣點設計位置方向。點擊測量按鈕(三維放樣還應輸入放樣點目標高),測量機器人自動照準測量該放樣點并將放樣點實測坐標和調整量計算結果顯示在軟件中。當放樣點實測坐標滿足要求后,點擊保存按鈕,即可將放樣點實測坐標和調整量的最終結果以文本形式保存在PDA內存中。放樣測量界面和放樣結果文件格式分別如圖6、表1所示。
3 主要結論
(1)本文首先根據現代放樣測量自動化、實時化的發展需求和特點,分析了自動放樣測量系統應滿足的工程施工建設期間的自動化放樣需求,并提出了放樣測量系統應實現的具體功能。
(2)結合放樣測量系統應實現的具體功能和相關算法研制了安裝在PDA上的自動放樣測量軟件,實現了多種模式設站、放樣點自動照準測量、放樣點調整量實時計算、合格放樣數據自動保存等功能。
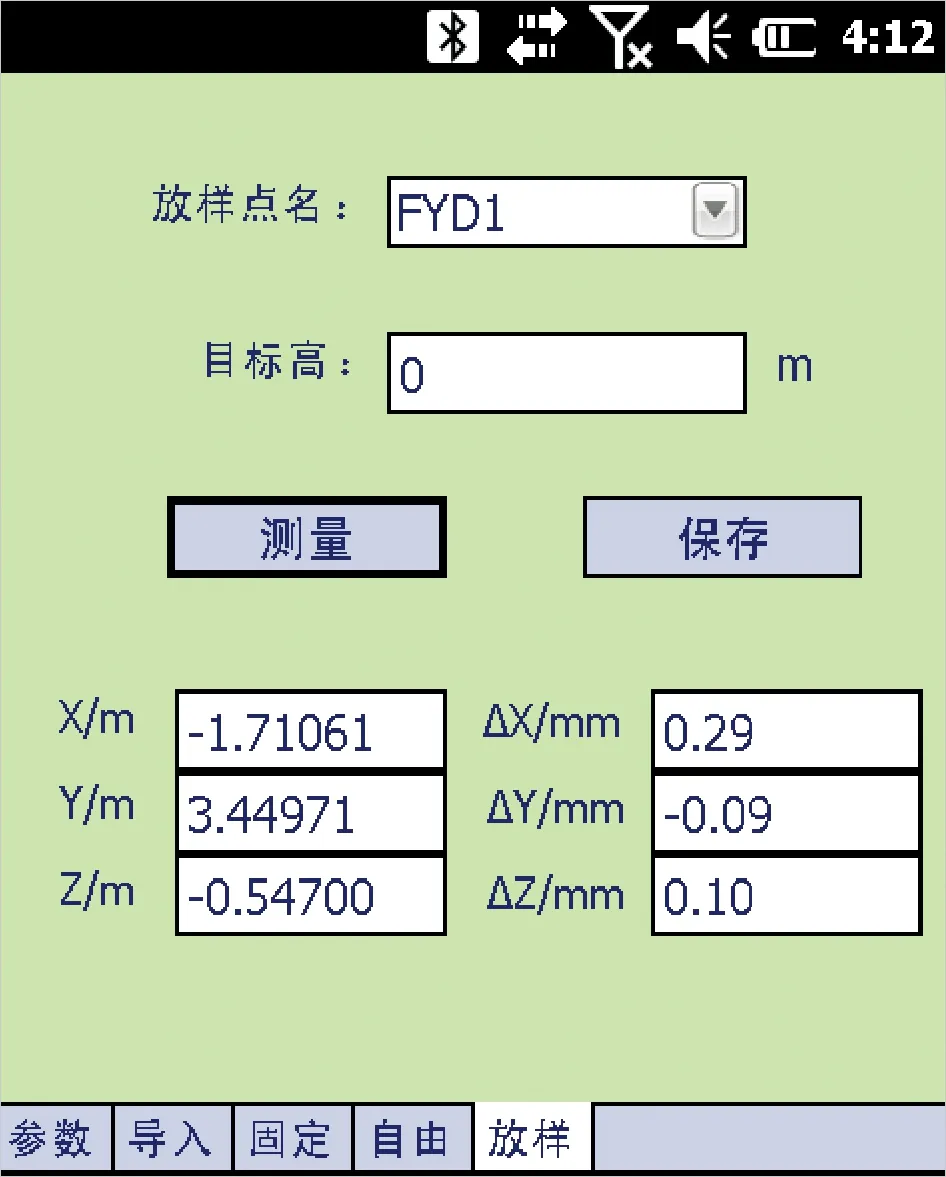
圖6 放樣測量界面

點名X/mY/mZ/mΔX/mmΔY/mmΔZ/mmFYD1-1.710613.44971-0.547000.29-0.090.10
(3)通過比較不同模式下放樣測量軟件計算的自由設站點和放樣點坐標與控制點已知坐標之間的差異,驗證了自動放樣測量系統運行的可靠性及軟件計算的正確性。
本文研制的自動放樣測量系統(ALS)在虎門二橋樁基施工放樣和東、西兩個高大索塔各個節段的施工放樣測量中進行了實際應用,證明了該系統放樣結果正確,運行可靠,而且測站位置選擇靈活,放樣效率高,值得在土木工程施工放樣測量中推廣使用,同時本文對同類系統的開發具有借鑒作用。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
藝術啟蒙(2018年7期)2018-08-23 09:14:18
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21