防下潛分析的有限元建模方法研究
2019-11-26 07:17:44劉玉云盧靜鄭顥亓向翠
汽車技術 2019年11期
劉玉云 盧靜 鄭顥 亓向翠
(廣州汽車集團股份有限公司 汽車工程研究院,廣州 511434)
1 前言
乘員下潛是指在汽車發生碰撞過程中,正常作用在乘員肩部和腹部的安全帶,由于受力不均衡導致腹部安全帶從受力的髖骨位置向上滑入腹部軟組織位置的現象[1],容易造成腹部軟組織損傷,一般個體較小的乘員發生下潛的概率更高。考慮到下潛造成的損傷風險,歐盟新車認證程序(Euro-NCAP)、中國新車評價規程(C-NCAP)等評價體系將后排女性乘員的防下潛性能納入其評價范圍,進一步推動了對防下潛性能的研究[2]。
近年來,國內相關學者針對防下潛性能的優化進行了理論分析,如張嘯等人[3]針對防下潛從受力的角度進行了研究;李永剛等人[4]從座椅強度等方面進行探討;唐亮等人[5]針對兒童的下潛損傷進行了研究;Taoka[6-7]等針對下潛對胸部的影響、兒童下潛損傷的防護進行了研究。上述研究主要基于有限元仿真或滑臺試驗,但對于有限元仿真分析和滑臺試驗模擬的可靠性以及如何精確指導產品設計等方面研究較少。為此,本文從安全帶建模及碰撞條件的加載方法等方面出發,探討不同建模方式對下潛的影響及其原因。
2 假人下潛的受力分析
在汽車發生碰撞事故時,車內乘員在慣性力的作用下繼續保持向前運動,此時,由于安全帶及座椅的約束作用,使得乘員能夠安全地減速直至最后停止運動。但是,如果這個過程中突然出現乘員下潛,安全帶力累積上升的拉伸力將直接作用在腹部而導致乘員受傷,圖1為腹部安全帶與人體的相互作用力關系[5]。
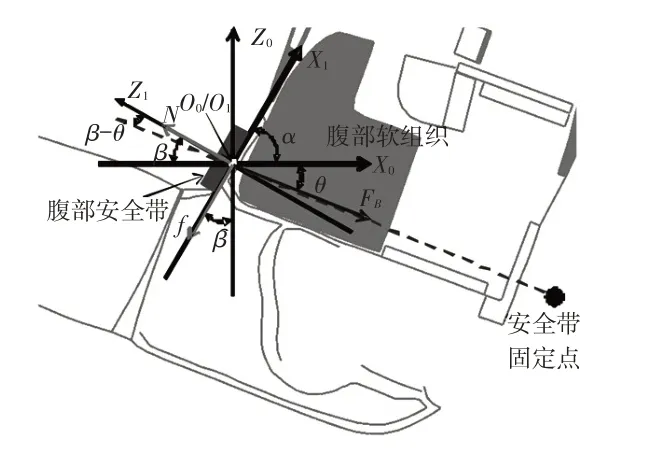
圖1 腹部安全帶與人體的相互作用力
圖1中,以水平向右為X軸正向、垂直向上為Z軸正向、安全帶中心點為原點建立坐標系X0O0Z0;安全帶寬度方向(假定安全帶為平面)與水平方向的夾角為α,沿安全帶的橫向建立局部坐標系X1O1Z1,原點O0與O1重合。圖1中,FB為腹部安全帶的拉伸力,N為安全帶作用在乘員腹部的法向力,β為安全帶法向力與水平方向的夾角,θ為安全帶與水平方向的夾角,f為安全帶受到的沿X1方向的摩擦阻力。
根據相關文獻[3,5,8]可知,乘員發生下潛與安全帶作用在腹部的約束力以及假人運動姿態有關。因此,為在仿真中準確分析下潛風險,以精確指導產品設計,必須準確模擬出碰撞中乘員與安全帶的相互作用力關系,所以需要對安全帶的建模方式、模型的加載方式等對防下潛仿真分析產生的影響進行研究。
3 安全帶建模方法影響分析
在基于軟件LS-DYNA 有限元仿真分析中,安全帶建模方式主要有3種:第1種是用純一維單元的方式模擬安全帶,目前這種模擬方式在約束系統的分析中應用較少,所以不進行討論;第2 種是用一維單元與二維殼單元混合建模方式模擬安全帶,如圖2所示;第3種建模方式是全二維殼單元的建模方式,即安全帶全部采用殼單元方式模擬,如圖3所示。

圖2 安全帶混合建模方式
因為只有一維單元才能通過滑環,因此在第2種建模方式中將安全帶滑過鎖扣的區域采用一維單元,以方便安全帶順利通過鎖扣的滑環;安全帶與假人接觸的部分采用殼單元模擬,以提高安全帶與假人的接觸模擬精度。在碰撞過程中,安全帶包括預緊和限力兩個階段,在預緊階段,腹部安全帶滑向肩部區域;在限力階段,假人的向前移動會帶動肩部安全帶滑過滑環進入腹部安全帶區域,兩個階段中安全帶的滑動方向如圖4箭頭方向所示。對于該建模方式,當一維安全帶在滑環間滑動時,如果一維安全帶建模時預設的長度不夠,一維安全帶末端連接的殼單元接觸滑環會導致仿真計算終止,因此為避免計算終止,在建模時需要預設足夠長度的一維安全帶單元,保證與一維安全帶末端相連接的殼單元不會接觸到滑環。但一維安全帶單元預留較長會導致一維安全帶單元作用在假人腹部對假人進行約束。
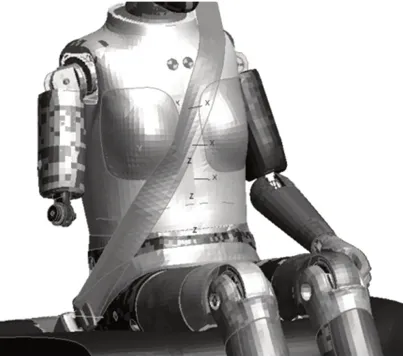
圖3 全二維殼單元建模方式
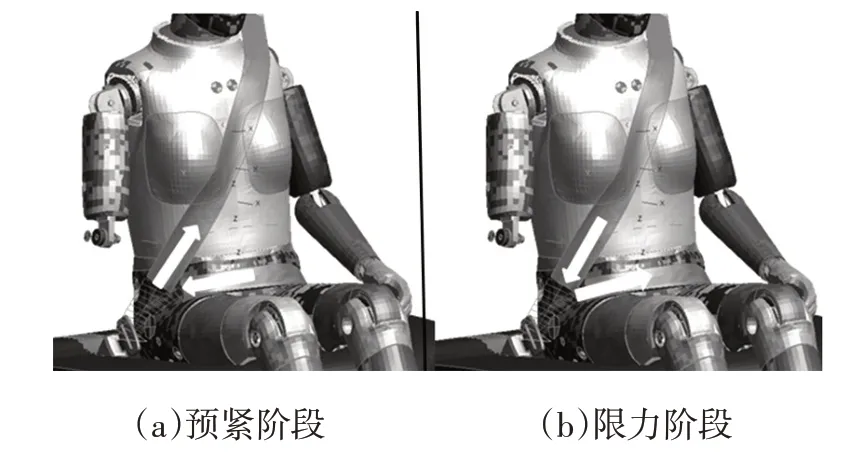
圖4 混合建模方式的安全帶滑動方向
針對第2 種和第3 種安全帶建模方式對仿真結果的影響進行對比分析。分析過程中,兩種建模方式的安全帶材料參數、安全帶與假人接觸的摩擦因數、假人與座椅接觸的摩擦因數、安全帶滑過滑環的摩擦因數等保持一致。兩種建模方式仿真中髂骨力及其減小速率時間歷程曲線如圖5 所示。圖5 中,模型1 為混合式建模方式,模型2為全二維殼單元建模方式。
從圖5 可看出,在50~60 ms 內,模型2 的髂骨力發生急劇變化。從髂骨力減小速率看,模型2的右髂骨力減小速率已超出1 000 kN/s,持續時間0.3 ms,而模型1的髂骨力減小速率在該時刻為負值,沒有任何下潛的跡象。根據C-NCAP 的評價規則,在假人回彈時刻前,髂骨力減小速率超出1 000 kN/s,持續時間未超出1 ms,不能判定為下潛,即未達到下潛扣分標準,但從仿真的角度評價,模型2 的仿真結果表明下潛扣分的風險較高,而根據模型1 的仿真結果,乘員下潛的風險幾乎為0。很顯然,兩個模型仿真的環境條件完全一致,唯一的差別只在于安全帶的建模方式不同,采用混合建模方式仿真分析評估出的乘員下潛風險低,采用全二維殼單元建模方式仿真分析評估出的乘員下潛風險相對較高。結合仿真分析的動畫,對比安全帶與假人的相互作用關系(圖6)、安全帶與假人髂骨相對位置(圖4),可發現造成這種差異的原因。
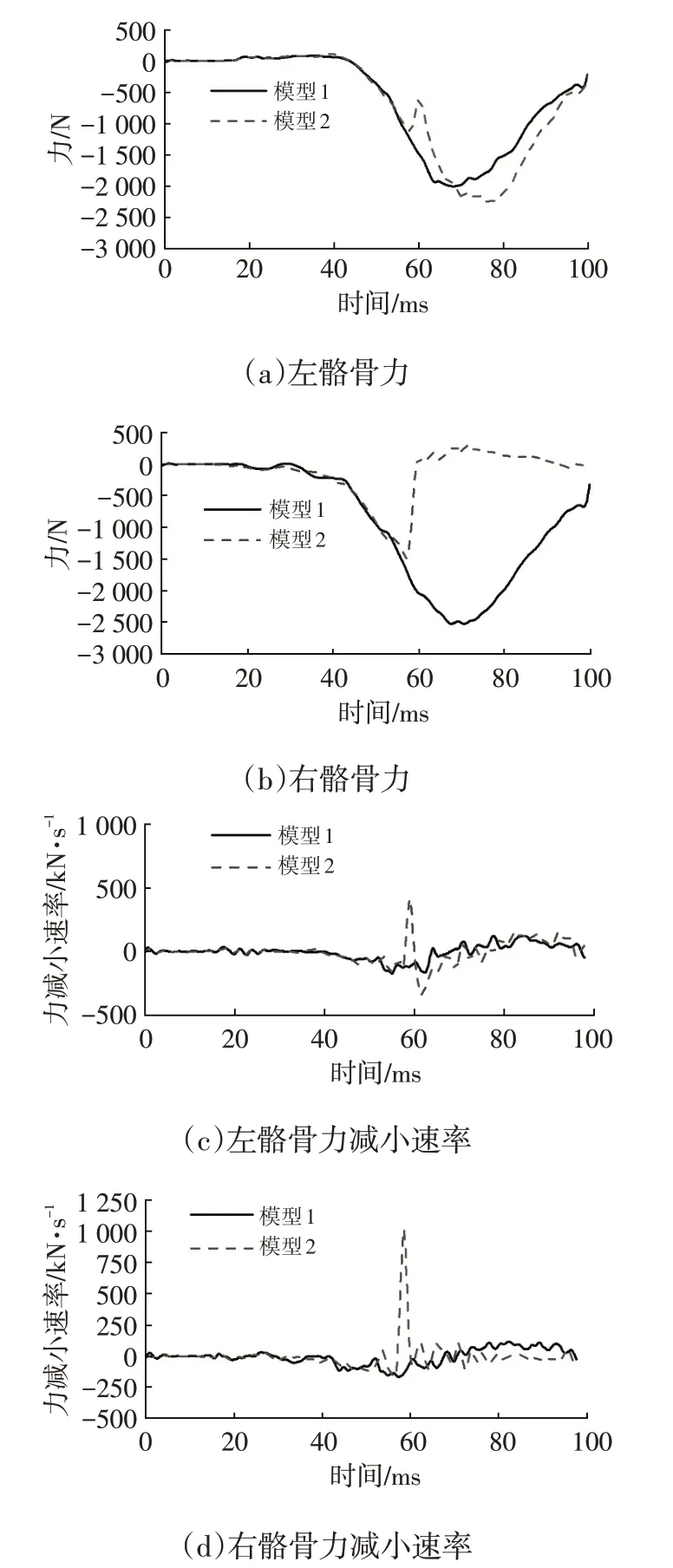
圖5 兩種模型的髂骨力及其減小速率對比
由圖6a可看出,在初始0 ms時刻,采用混合建模方式(模型1)時,在右側鎖扣處一部分一維單元安全帶與假人接觸;采用全二維殼單元建模方式時(模型2),均是二維殼單元安全帶與假人接觸。
由圖6b 和圖6c 可看出,一維安全帶與假人的相互作用力比二維殼單元安全帶更為集中,髂骨處的皮膚更容易變形。因髂骨的末端呈凹形(圖7),當一維安全帶擠壓盆骨時,安全帶對腹部的約束力通過一維線作用在髂骨的凹形位置,此時一維安全帶不易越過凹槽上端凸起的部分,從而停止向上滑動。
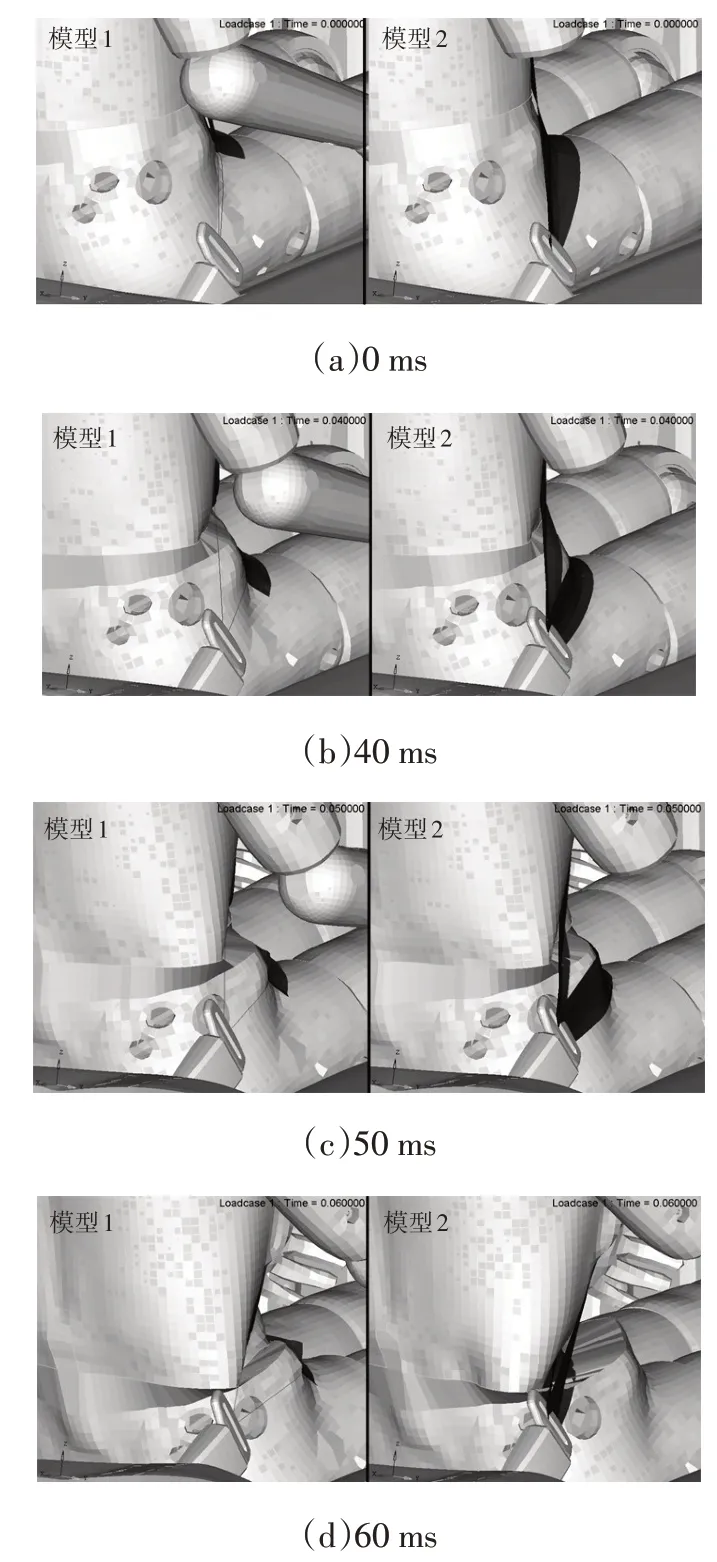
圖6 安全帶與假人的相互作用關系對比
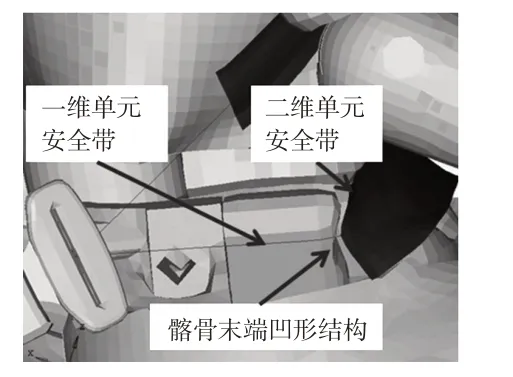
圖7 安全帶與假人髂骨相對位置示意
由圖6d可看出,在60 ms時刻,模型1中,假人與安全帶相互作用仍處于自鎖狀態,這是一種不真實的模擬現象,是由于一維安全帶施加在假人表面的約束力太集中而造成的一種假性自鎖;在模型2中,在髂骨處,二維殼單元的安全帶腰帶力均勻作用在腹部上,安全帶自由滑動,在60 ms 時刻,由于安全帶腰帶對假人腹部的約束發生了失穩,安全帶滑入假人腹部軟組織區域而發生下潛現象。
通過模型1 和模型2 仿真結果的對比可知,安全帶采用混合建模方法,在防下潛分析中具有一定的局限性,在某種程度上容易造成假性自鎖狀態,對仿真分析造成干擾,不利于探究潛在的風險。
4 加載方式的影響分析
在防下潛仿真分析中,碰撞波形加載的方式一般有3種:第1種是簡化的滑臺模式,即只對模型中的白車身施加碰撞方向的加速度;第2種是在第1種方法的基礎上考慮白車身橫向的轉動;第3 種是建立整車模型,分析后排的乘員下潛風險。第3 種方式仿真分析效率較低,不對其進行討論。
滑臺試驗是在約束系統開發中一種常用的驗證手段[4-5,8],但在項目的開發過程中發現,在某種情況下,滑臺試驗時乘員沒有出現下潛,但在整車試驗中卻出現下潛,圖8為某項目中滑臺試驗與整車試驗的損傷對比。由圖8可看出,整車試驗中,在約60 ms 時刻假人左、右兩側的髂骨力都出現了急劇降低,在持續1 ms 的時間范圍內,髂骨力減小速率大于1 000 kN/s,符合C-NCAP 中關于下潛的評價標準。但根據整車環境開展的滑臺試驗中,左、右側髂骨力曲線光順,髂骨力減小速率未超過300 kN/s,遠未達到下潛的評價標準。
兩次試驗存在差異的原因為,滑臺試驗中不能模擬碰撞中整車橫向的轉動(前傾)效果,而在正面碰撞中,整車橫向的運動趨勢可能會導致假人盆骨相對車體的橫向轉動(圖9),進而加劇下潛的發生。
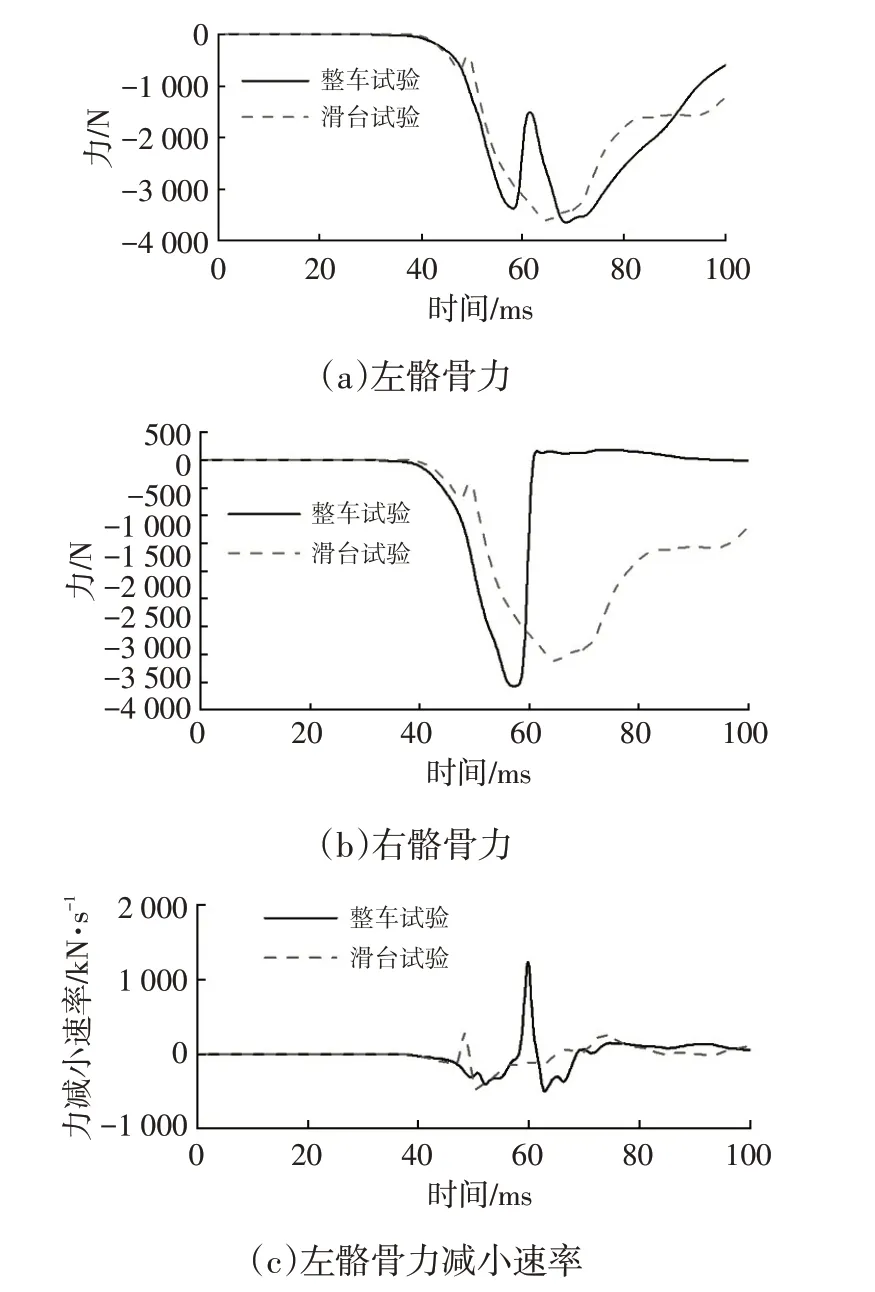
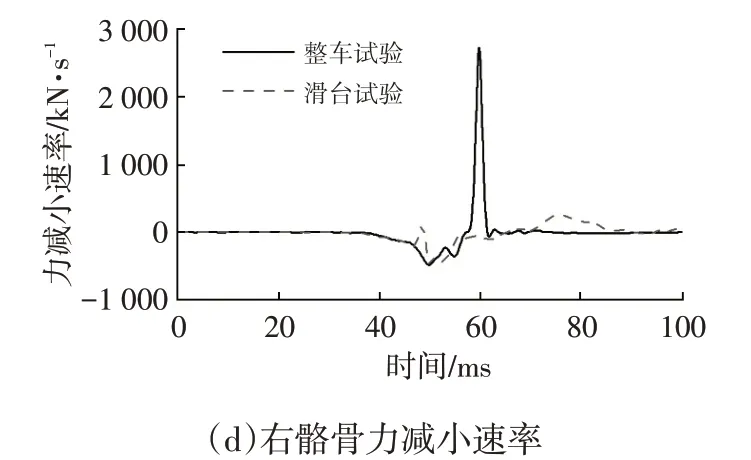
圖8 整車與滑臺試驗結果對比

圖9 假人盆骨相對車體轉動示意
為探討橫向轉動對防下潛分析的影響,以某項目的預研模型為基礎,建立100%重疊率的正面碰撞仿真模型,定義模型3只加載X向加速度,定義模型4在加載X向加速度的同時考慮車體橫向轉動效應。仿真中髂骨力及其減小速率如圖10所示。由圖10可看出,當考慮車體橫向轉動效應(模型4)時,右側髂骨力減小速率在假人回彈時刻前超過了1 000 kN/s,持續時間0.8 ms;在未考慮車體橫向轉動效應(模型3)時,髂骨力曲線光順,下潛風險幾乎為0。由此可知,在仿真分析中,考慮橫向轉動效應能更準確地評估出實際情況中乘員下潛的風險。
進一步對考慮了車體橫向轉動后下潛風險增加的原因進行分析。圖11為模型3和模型4中假人在60 ms時刻相對車體的姿態對比。
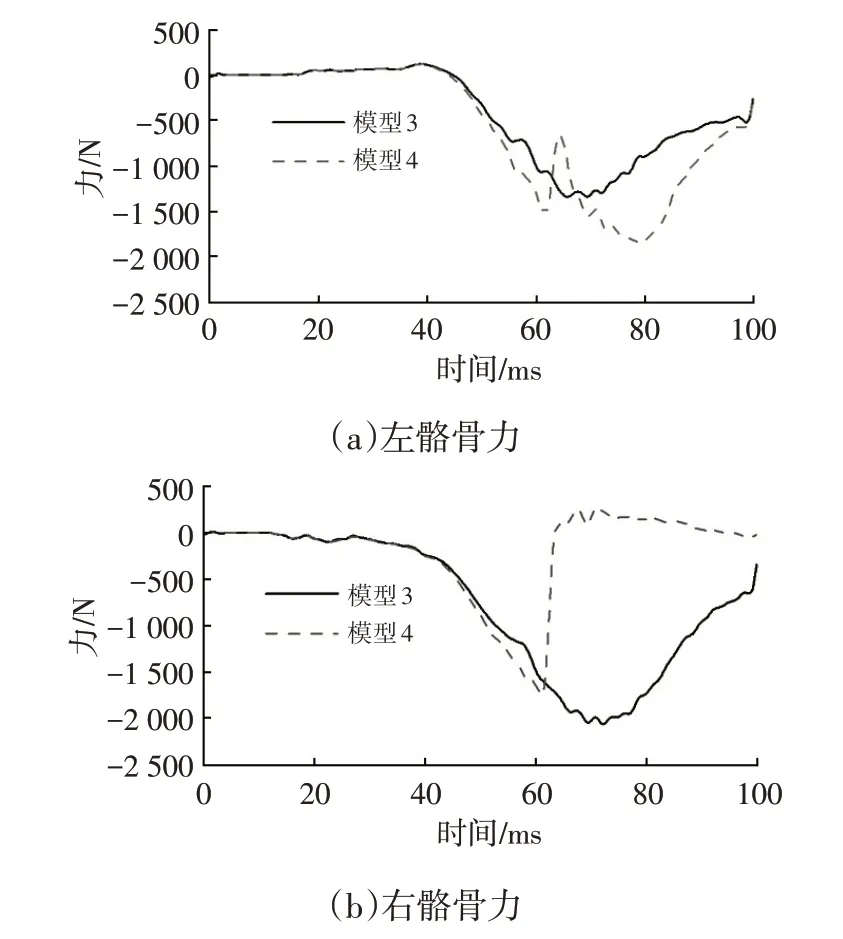

圖10 模型3與模型4髂骨力及其減小速率對比
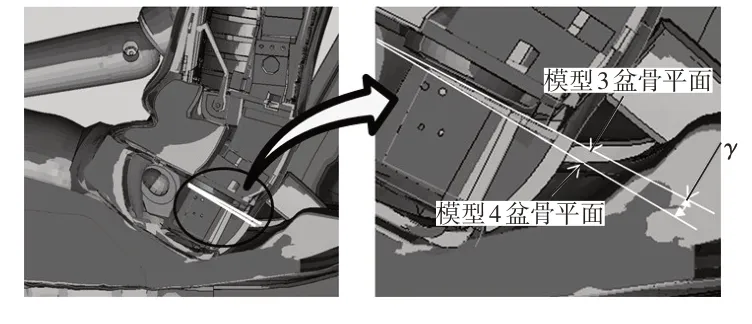
圖11 不同加載方式下假人運動狀態
從圖11可看出,模型4中假人盆骨平面的傾斜程度(圖中深色)明顯大于模型3 中盆骨平面的傾斜程度(圖中淺色),表明考慮了橫向轉動后,盆骨相對車體轉動的角度增加。根據安全帶與假人相互作用力的分析(圖1)可知,盆骨相對車體轉動角度增加,則β值增加,α減小,由于安全帶及鎖扣的安裝位置不變,且安全帶限力不變,所以θ值不變,FB不變。雖FB不變,但因α減小,導致FB在X1方向的分力增加,使得安全帶沿腹部上滑方向的分力增加,因此,假人下潛的風險相應增加。
通過上述分析可知,滑臺試驗中若不考慮橫向的轉動效應,則會造成滑臺試驗中假人的轉動角度小于整車試驗中的轉動角度,這種差異的大小與整車試驗中整車橫向轉動的程度有關。因此在整車試驗中,如果車體橫向的轉動程度較大,則滑臺試驗不利于下潛風險的評估。在仿真分析中,若不考慮車體橫向轉動效應對防下潛分析的影響,在某種程度上也無法準確評估實際情況下假人的下潛風險。
5 結束語
研究了安全帶的建模方式對防下潛分析的影響,表明普通的安全帶混合建模方式存在局限性,采用全二維殼單元的安全帶建模方式可以避免仿真中出現假性自鎖,提高仿真分析精度。車體橫向轉動對乘員下潛有一定的影響,從提升仿真精度的角度考慮,建議在仿真分析中加載橫向轉動,提升防下潛仿真分析的準確性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06
