基于WorkBench的車(chē)輛差速器非圓錐齒輪副靜態(tài)與模態(tài)特性分析
2019-11-27 05:23:24樊智濤賈巨民陶澤南
裝甲兵工程學(xué)院學(xué)報(bào) 2019年3期
樊智濤, 賈巨民, 王 亮, 陶澤南
(1. 陸軍軍事交通學(xué)院研究生隊(duì), 天津 300161; 2. 陸軍軍事交通學(xué)院軍用物資配送系, 天津 300161)
差速器是汽車(chē)動(dòng)力系統(tǒng)的重要一環(huán),其性能好壞影響著越野車(chē)輛行駛的通過(guò)性和越障能力。對(duì)普通差速器而言,其齒輪副多為對(duì)稱圓錐齒輪,在遇到打滑、泥濘等路面時(shí)“差速不差扭”的特性使得普通差速器難以實(shí)現(xiàn)扭矩的合理分配,車(chē)輛常常因動(dòng)力不足而陷入困境。而限滑差速器的出現(xiàn)使得這一弊端被打破,較大地提高了差速性能。限滑差速器傳動(dòng)結(jié)構(gòu)如圖1所示。
目前,對(duì)限滑差速器的研究主要涉及改進(jìn)控制方式和提高限滑性能2個(gè)方面,其中對(duì)差速器的控制方式主要有強(qiáng)制鎖止、機(jī)械控制和電動(dòng)控制3種,而電動(dòng)控制模式的敏感度和可靠性更高[1]。在提高限滑性能方面主要研究如何提高鎖緊系數(shù)和越野性能,如:國(guó)外托森差速器通過(guò)改變傳統(tǒng)齒輪副傳動(dòng),利用蝸輪蝸桿高摩擦傳動(dòng)原理,較大程度地提高了差速器鎖緊系數(shù)[2];伊頓公司研制出一種具有鎖止功能的新型限滑差速器[3];姜虹等[4]也進(jìn)一步研制出三周節(jié)變傳動(dòng)比限滑差速器,較大程度地避免了車(chē)輛側(cè)滑,提高了車(chē)輛越野能力。
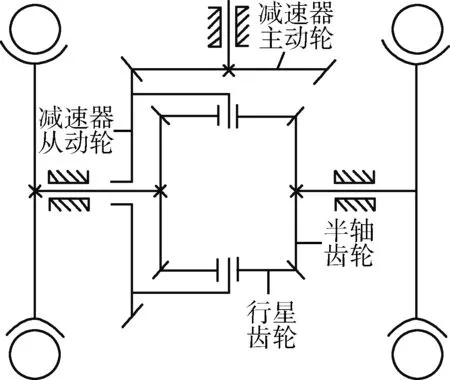
圖1 限滑差速器傳動(dòng)結(jié)構(gòu)
課題組運(yùn)用保測(cè)地曲率映射原理設(shè)計(jì)出一種9~12變傳動(dòng)比非圓錐齒輪差速器,該型差速器傳動(dòng)比可變,實(shí)測(cè)鎖緊系數(shù)可達(dá)到2.2。對(duì)該新型齒輪副的研究主要是在傳動(dòng)原理及特性[5]、齒形設(shè)計(jì)及加工制造分析等方面,而對(duì)其輪齒承載能力的研究則相對(duì)較少。為進(jìn)一步驗(yàn)證該新型差速器的性能,應(yīng)用有限元方法,借助ANSYS WorkBench軟件對(duì)差速器主要承載件進(jìn)行強(qiáng)度校核,初步檢驗(yàn)輪齒強(qiáng)度能否滿足行駛工況要求,并對(duì)非圓齒輪副進(jìn)行模態(tài)分析,檢驗(yàn)齒輪副在運(yùn)轉(zhuǎn)過(guò)程中的振動(dòng)和噪聲是否會(huì)引起共振,最后通過(guò)臺(tái)架對(duì)該型差速器能夠滿足相關(guān)力學(xué)性能要求等進(jìn)行了試驗(yàn)驗(yàn)證。
1 幾何模型的構(gòu)建
對(duì)于變傳動(dòng)比限滑差速器來(lái)說(shuō),其核心部件為嚙合傳動(dòng)的非圓錐齒輪副。筆者在研究變傳動(dòng)比限滑差速器工作原理的基礎(chǔ)上,借助SolidWorks建模軟件完成非圓錐齒輪副的模型構(gòu)建和虛擬裝配。
以半軸齒輪為例,半軸齒輪設(shè)計(jì)為每4個(gè)齒為一個(gè)周期對(duì)稱布置,共12個(gè)齒,在建模時(shí)只建立一個(gè)周期的齒廓模型。首先,借助SolidWorks的鏡像和圓周陣列得到整體齒廓曲線;其次,按照齒輪大端齒廓曲線到圓心的順序向球心放樣,得到放樣曲面,切割外圓球面并與放樣曲面生成實(shí)體得到初步節(jié)錐模型;再次,設(shè)定齒寬,采用曲面切除確定小端齒廓;最后,設(shè)定中心軸孔直徑參數(shù),借助倒角命令對(duì)模型做最后處理,完成半軸齒輪的最終建模。行星齒輪的建模方法可參照半軸齒輪進(jìn)行。
為了更好地反映非圓錐齒輪副模型建立的正確性,還需要進(jìn)行虛擬裝配和干涉檢查,如圖2所示。裝配完成的變傳動(dòng)比非圓錐齒輪副如圖3所示。

圖2 虛擬裝配和干涉檢查示意圖

圖3 變傳動(dòng)比非圓錐齒輪副
2 靜力學(xué)分析
對(duì)變速比限滑差速器而言,車(chē)輛在行駛過(guò)程中會(huì)遇到直線行駛和差速行駛(轉(zhuǎn)彎或限滑)2種工況,選取這2種有代表性的工況進(jìn)行靜力學(xué)分析。其中:在直線行駛工況下,差速器處在平衡位置,該情況在車(chē)輛行駛過(guò)程中出現(xiàn)頻率最高;在差速行駛工況下,差速器開(kāi)始差速限滑,在達(dá)到限滑極限(限滑臨界點(diǎn))時(shí)差速器所受載荷最大。
2.1 有限元分析模型和算法理論
在齒輪嚙合傳動(dòng)過(guò)程中,齒面之間會(huì)產(chǎn)生摩擦力和正壓力。與單件計(jì)算和組合計(jì)算模型相比,非線性接觸摩擦模型能夠更真實(shí)地反映齒輪受載情況,故選擇非線性接觸摩擦模型進(jìn)行分析。
2.1.1 接觸摩擦模型
在差速器非圓錐齒輪的嚙合傳動(dòng)過(guò)程中,齒面間會(huì)產(chǎn)生相對(duì)滑動(dòng),其等價(jià)切應(yīng)力Teg及極限切應(yīng)力Tlim分別為[6]
τeq=μeqp+b,p≤[τ];
(1)
τlim=μlimp+b,p>[τ]。
(2)
式中:μeq為等價(jià)摩擦因數(shù);μlim為極限摩擦因數(shù);p為單元接觸正向壓力;b為接觸內(nèi)聚力;[τ]為許用剪應(yīng)力。當(dāng)τeq<τlim時(shí),齒輪間就會(huì)產(chǎn)生相對(duì)滑動(dòng)。
2.1.2 摩擦接觸算法
增強(qiáng)拉格朗日方法對(duì)接觸剛度系數(shù)不很敏感,其能夠更好地調(diào)節(jié)壓力的大小,但當(dāng)出現(xiàn)網(wǎng)格畸形時(shí),需要進(jìn)行多次迭代,其單元接觸壓力定義為
(3)
式中:Kn為法向接觸剛度;μn為法向摩擦因數(shù);un為法向接觸間隙;
(4)
其中λi為第i次迭代拉格朗日乘數(shù)。
2.2 前處理及加載求解
根據(jù)齒輪副設(shè)計(jì)要求,選擇齒輪副比較常用的20CrMnTi進(jìn)行仿真分析,其具體材料屬性如表1所示。

表1 20CrMnTi材料參數(shù)表
在對(duì)齒輪副進(jìn)行網(wǎng)格劃分時(shí),采用四面體三維實(shí)體單元SOLID187進(jìn)行非線性計(jì)算,網(wǎng)格尺寸設(shè)置為1 mm。網(wǎng)格初步劃分完成后,為減小計(jì)算誤差,對(duì)齒輪接觸面進(jìn)行網(wǎng)格局部細(xì)化,完成細(xì)化后的網(wǎng)格如圖4所示。行星齒輪共劃分為23 384個(gè)節(jié)點(diǎn)、13592個(gè)單元,半軸齒輪共劃分為46767個(gè)節(jié)點(diǎn)、27 183個(gè)單元。
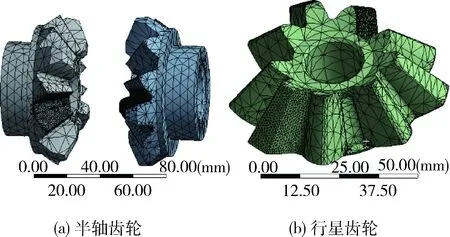
圖4 齒輪副網(wǎng)格劃分示意圖
為簡(jiǎn)化分析過(guò)程、縮短分析時(shí)間,選取1個(gè)行星齒輪和2個(gè)半軸齒輪形成齒輪副進(jìn)行分析,在齒輪副之間添加接觸對(duì),行星齒輪為接觸面、半軸齒輪為目標(biāo)面、設(shè)定接觸類型為摩擦、接觸方式為No separation、摩擦因數(shù)為0.1。
當(dāng)車(chē)輛以30 km/h 在正常路面直線行駛時(shí),根據(jù)車(chē)輛參數(shù)計(jì)算得到此時(shí)車(chē)輪轉(zhuǎn)速為1 279.42 r/min,殼體所受最大轉(zhuǎn)矩為T(mén)=4 929 N·m;當(dāng)車(chē)輛在不同附著路面以同樣速度限滑行駛時(shí),給定兩側(cè)半軸的阻力矩分別為T(mén)R1=1 989 N·m和TR2=2 940 N·m,模擬差速和限滑差扭工況。
2.3 求解及結(jié)果分析
參數(shù)設(shè)置完成后,在求解器中分別計(jì)算齒輪副在直線行駛工況和差速行駛工況下的應(yīng)力和變形值,輸出相對(duì)應(yīng)的應(yīng)力云圖和變形云圖,分別如圖5、6所示。
由圖5可知:齒輪副最大應(yīng)力主要出現(xiàn)在行星齒輪齒頂和半軸齒輪齒根部位,其中直線行駛時(shí)最大應(yīng)力為626 MPa,差速行駛工況時(shí)約為660 MPa。與20CrMnTi的強(qiáng)度極限 830~1080MPa 相比,齒輪副強(qiáng)度均能夠滿足行駛工況要求。
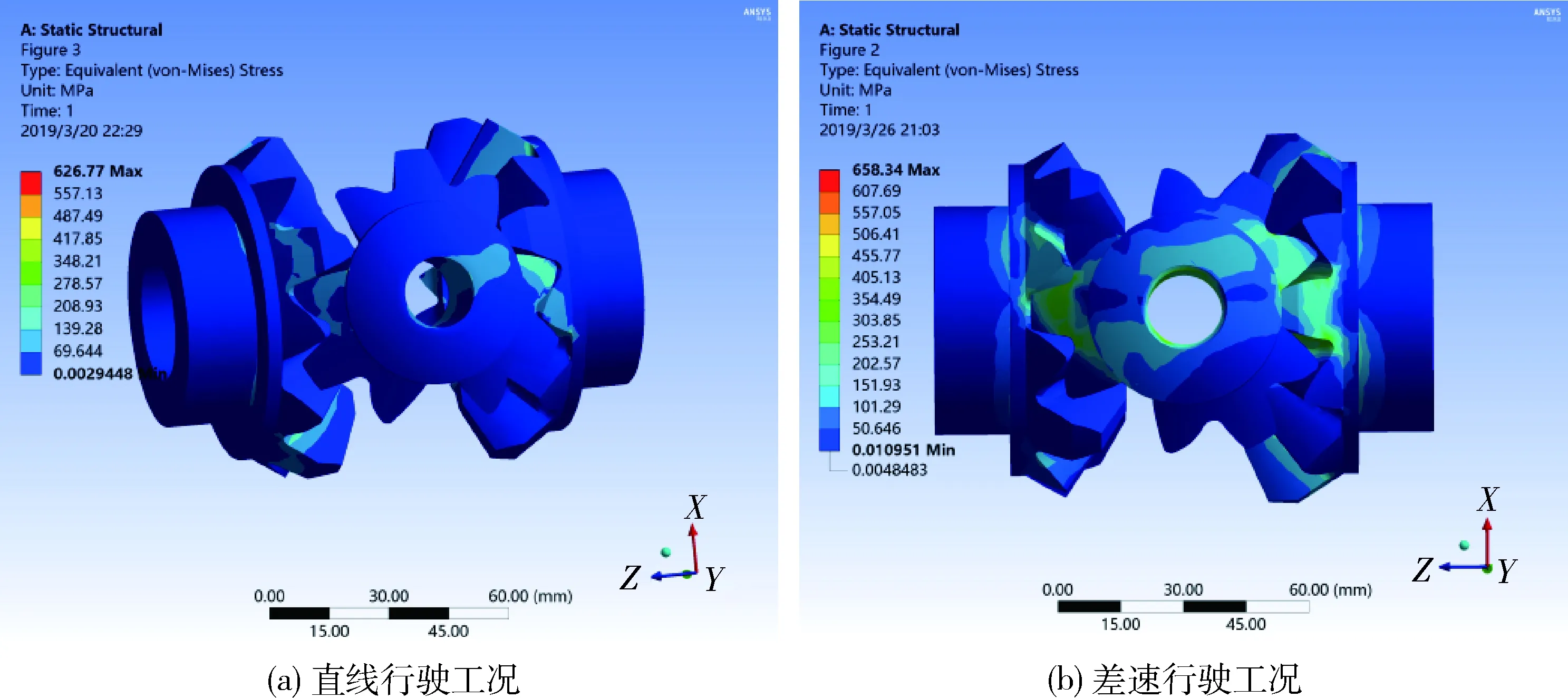
圖5 2種工況下齒輪副的應(yīng)力云圖
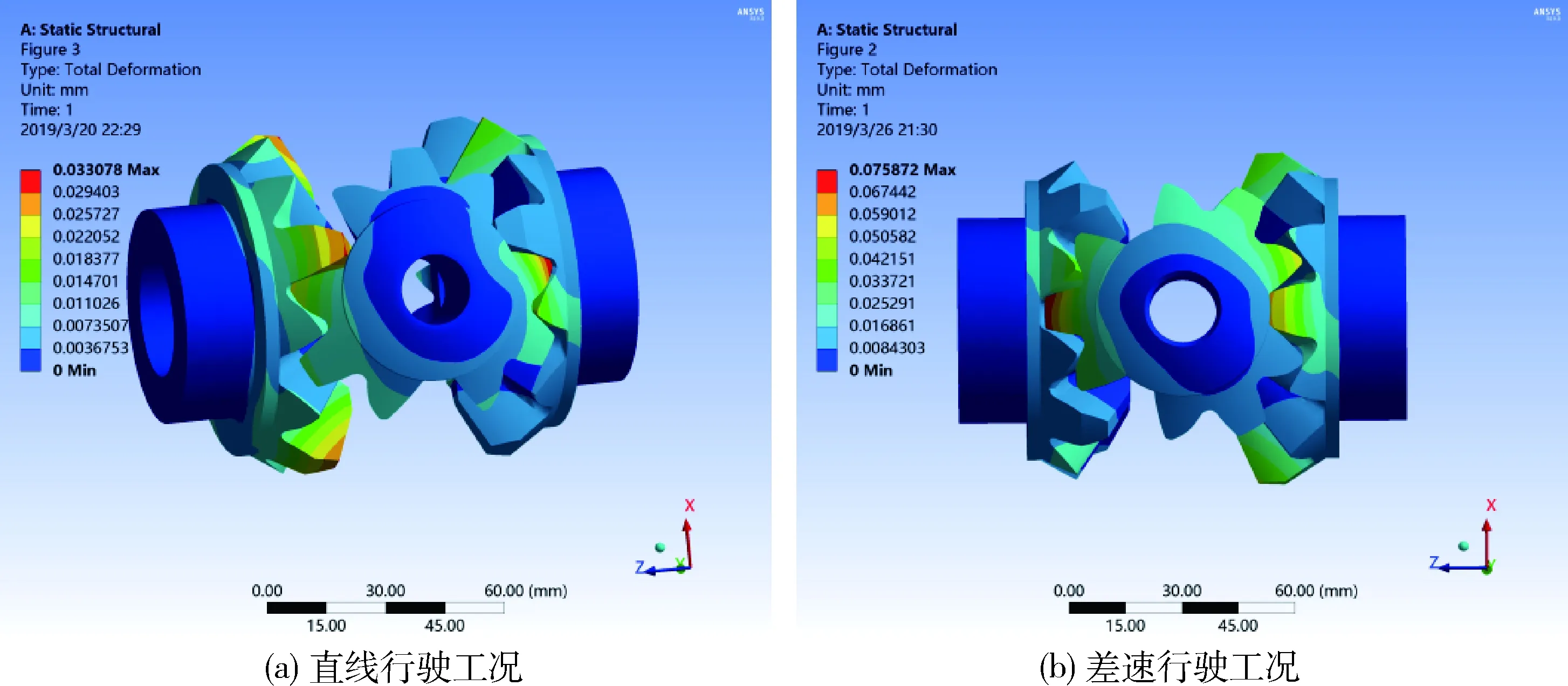
圖6 2種工況下齒輪副的變形云圖
由圖6 可以看出:2種工況最大變形均發(fā)生在行星齒輪和半軸齒輪齒頂部,由于差速工況存在行星齒輪和半軸齒輪的相對(duì)轉(zhuǎn)動(dòng),其變形量較大,最大變形量約為 0.076 mm;由于直線行駛工況行星齒輪和半軸齒輪無(wú)相對(duì)轉(zhuǎn)動(dòng),行星齒輪起等臂推力桿的作用,其變形較小,最大變形量約為 0.033 mm。以圖6(b)中行星齒輪變形量最大的接觸面為例,在 Solidworks 中測(cè)得其面積為 459.95 mm2,周長(zhǎng)為 127.4 mm,變形量遠(yuǎn)小于上述數(shù)值。
綜合應(yīng)力云圖和變形云圖可以得出:行星齒輪齒頂和半軸齒輪齒根部位容易發(fā)生疲勞磨損和點(diǎn)蝕。
3 模態(tài)分析
3.1 基本理論
機(jī)械系統(tǒng)的每一階模態(tài)具有其特定的固有頻率和模態(tài)振型,模態(tài)分析是進(jìn)行振動(dòng)分析的基礎(chǔ)。為了避免產(chǎn)生共振,齒輪副的固有頻率必須高于其工作頻率,而將自身固有頻率與外界激勵(lì)頻率間的耦合降到最小,有利于提高其剛度,減小工作負(fù)荷,延長(zhǎng)使用壽命[7]。
齒輪系統(tǒng)的運(yùn)動(dòng)微分方程[8]:

(5)

在對(duì)齒輪嚙合傳動(dòng)系統(tǒng)的求解過(guò)程中,將齒輪系統(tǒng)視為自由振動(dòng),即不計(jì)外力干擾,且忽略阻尼對(duì)振動(dòng)特性的影響,得到無(wú)阻尼自由振動(dòng)的運(yùn)動(dòng)微分方程:

(6)
設(shè)x=xsin(wjt),則可以得到
(K-w2M)x=0。
(7)
3.2 結(jié)果分析
理論上齒輪副存在無(wú)限個(gè)固有頻率,固有頻率隨模態(tài)階數(shù)的增加而增大。由于結(jié)構(gòu)振動(dòng)中高階模態(tài)能量占比太低,對(duì)整個(gè)結(jié)構(gòu)振動(dòng)影響不大,一般只對(duì)前6階振型進(jìn)行分析。且由于齒輪副工作頻率一般不會(huì)太高,因此激振頻率只會(huì)和低階模態(tài)的固有頻率重合或接近。以差速工況為例,對(duì)非圓齒輪副前6階模態(tài)進(jìn)行分析,其固有振型圖如圖7所示。
由圖7可以看出:在第1階模態(tài)下的最大變形位置主要集中在行星齒輪齒頂處,第 2、4、5階模態(tài)下主要集中左側(cè)半軸齒輪齒頂處,第3、6階模態(tài)下則主要集中右側(cè)半軸齒輪齒頂;在前6階模態(tài)中,模態(tài)階數(shù)越高,固有頻率越大,其中第 1階模態(tài)下固有頻率為 21 677 Hz,第 6階模態(tài)下為26 252 Hz;第 2階模態(tài)的變形量最小,為107.53 mm,第 6階模態(tài)的變形量最大,為165.41 mm。非圓齒輪副齒輪副前6階固有頻率及振型特點(diǎn)如表2所示。
在臺(tái)架試驗(yàn)時(shí),給定從動(dòng)電機(jī)最大轉(zhuǎn)速為 5 000 r/min,根據(jù)轉(zhuǎn)速與頻率的關(guān)系可知:此時(shí)齒輪副最大嚙合頻率為 83.3 Hz,遠(yuǎn)小于齒輪副的1階固有頻率,故不會(huì)有共振發(fā)生。

圖7 非圓齒輪副前6階固有振型

表2 非圓齒輪副前6階振型固有頻率及振型特點(diǎn)
4 加工試驗(yàn)
非圓錐齒輪結(jié)構(gòu)復(fù)雜,目前主要有數(shù)控線切割、數(shù)控銑削以及冷擠壓等加工方法,其中:數(shù)控線切割加工精度較低,很難實(shí)現(xiàn)高精度加工;數(shù)控銑削雖然加工精度高,但成本也高,生產(chǎn)效率比較低,不適合批量生產(chǎn);冷擠壓能夠制造復(fù)雜零件,且效率較高,成本比較低。采用冷擠壓方法加工齒輪,加工成型的非圓齒輪副如圖8所示。
加工完成后,對(duì)變傳動(dòng)比限滑差速器進(jìn)行臺(tái)架試驗(yàn),觀察實(shí)際工作情況下差速器齒輪副是否會(huì)因應(yīng)力集中導(dǎo)致輪齒折斷和磨損,并計(jì)算該型差速器的鎖緊系數(shù),如圖9所示。由于該型差速器為新型限滑差速器,在試驗(yàn)方法上課題組聯(lián)合吉林大學(xué)車(chē)輛產(chǎn)品檢測(cè)實(shí)驗(yàn)室共同制定限滑差速器臺(tái)架試驗(yàn)方法,其步驟為:將差速器裝入驅(qū)動(dòng)橋中進(jìn)行磨合實(shí)驗(yàn),添加適量潤(rùn)滑油,采用風(fēng)冷方式控制潤(rùn)滑油溫度保持在70~90 ℃,運(yùn)轉(zhuǎn)一段時(shí)間后再進(jìn)行試驗(yàn)。

圖8 加工成型的非圓齒輪副

圖9 差速器臺(tái)架試驗(yàn)
設(shè)定車(chē)輪轉(zhuǎn)速為30 r/min,在兩側(cè)半軸分別施加阻力矩100、200 N·m,并計(jì)算不同轉(zhuǎn)速差下的鎖緊系數(shù)值,如表3所示。

表3 不同轉(zhuǎn)速差下的差速器鎖緊系數(shù)值
由表3可以看出:限滑差速器的鎖緊系數(shù)為1.56~2.04。這說(shuō)明行星齒輪副齒頂和半軸齒輪齒根應(yīng)力集中部位存在部分磨損,與有限元仿真分析結(jié)果相一致,結(jié)合試驗(yàn)?zāi)p主要發(fā)生部位,可以考慮下一步可在應(yīng)力集中的齒根處添加加強(qiáng)筋,并對(duì)齒形進(jìn)行鼓形修形處理。
5 結(jié)論
借助ANSYS Workbench對(duì)變傳動(dòng)比限滑差速器非圓齒輪副進(jìn)行了靜力學(xué)和模態(tài)分析,主要結(jié)論如下:齒輪副應(yīng)力和變形滿足設(shè)計(jì)要求,最大應(yīng)力發(fā)生在在行星齒輪齒頂和半軸齒輪齒根部位;齒輪副工作時(shí),工作頻率遠(yuǎn)小于固有頻率,不會(huì)發(fā)生共振。
猜你喜歡
中華詩(shī)詞(2020年1期)2020-09-21 09:24:52
小學(xué)生作文(中高年級(jí)適用)(2018年5期)2018-06-11 01:22:56
數(shù)學(xué)小靈通·3-4年級(jí)(2017年10期)2017-11-08 08:42:59
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00
數(shù)學(xué)大王·中高年級(jí)(2016年12期)2016-12-26 21:37:36
廣西科技大學(xué)學(xué)報(bào)(2016年1期)2016-06-22 13:10:37
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
航空學(xué)報(bào)(2015年4期)2015-05-07 06:43:35
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00
計(jì)算物理(2014年2期)2014-03-11 17:01:39
