
石材復合切割機器人的設計與研究
2019-11-27 05:52:04石何斌黃衛清
中國新技術新產品 2019年18期
石何斌 黃衛清

摘 ?要:該文設計了一種雙刀頭工具的復合切割機器人,這種機器人具有鋸切和水刀切割雙重功能,并將水刀安裝在蝸輪蝸桿電機上,這樣控制水刀可以有效避免鋸切和水刀之間的干涉,工業相機將收到的石材拼花圖像信息和待切割石板信息傳送給視覺檢測分析平臺,經過分析處理后,在離線編程軟件上進行仿真模擬,這樣可以得到最優的切割路徑、切割方式和切割速度。此石材復合切割機器人配有三切割平臺,這樣可以減少上下料時間,提高生產效率。
關鍵詞:雙刀頭工具;三切割平臺;復合切割;視覺檢測
中圖分類號:TH164 ? ? ? 文獻標志碼:A
0 引言
隨著人們生活水平的提高,對石材加工提出了更高的要求,石材拼花在近年來越來越受到廣大消費者的熱愛,在石材裝飾和加工領域,石材拼花使用率是最高的,因為它可以將不同形狀的石材組成想要的裝飾圖案,該領域包括了石材加工藝術、裝修設計技術和美學技術,非常有觀賞和工藝藝術價值。但是現如今石材拼花加工主要采用傳統三軸或五軸龍門、懸臂橋切機進行單一的直線鋸切切割或者是水刀切割,該加工方式速度慢、產能低、成本高且難以進行復雜的曲線切割加工。
1 總體結構及實施方案
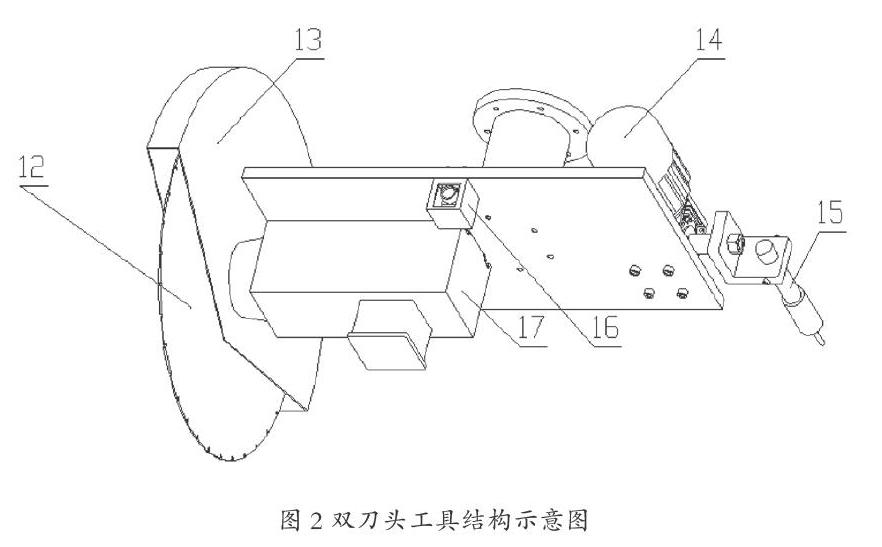
復合切割機器人包括機器人本體、機器人控制器,切割平臺、雙刀頭工具、空壓機、供砂機、工業相機、視覺檢測分析平臺、增壓機、冷卻塔、供水機。總體結構供水機為冷卻塔和增壓機供水,空壓機為供砂機提供壓力。供砂機可以提供不同大小的砂石顆粒,以滿足水刀切割時所需要的水流切割壓力。機器人控制器控制機器人本體、增壓機、蝸輪蝸桿電機開關、鋸切電機開關和水切割開關,蝸輪蝸桿電機可以控制水刀的方向,這樣可以有效地避免雙刀具產生干涉。冷卻塔為增壓機進行冷卻,視覺檢測分析平臺控制工業相機,將工業相機得到的產品拼花圖案和石板在切割平臺上的位置信息輸送給電腦,視覺檢測分析平臺上的電腦進行分析處理,并通過離線編程軟件進行仿真模擬,進而得到最優的切割路徑、最優的切割方式和最優的切割速度,第一個切割平臺上的石板切割完成時,機器人將轉向第二個切割平臺繼續對待切割石板進行切割,同時切割完成的一側切割平臺進行上下料,以此往復。機器人控制器精確、穩定,實現自動化高效進行石板切割加工,降低人工成本。采用三切割平臺節省上下料時間,進一步提高了生產效率。復合切割機器人總體結構示意圖如圖1所示,雙刀頭工具結構示意圖如圖2所示。
2 機器選型
2.1 鋸切電機的選型
2.2 蝸輪蝸桿電機的選型
由于水刀在工作的時候,帶有砂石顆粒的水流沖擊力很大,因此固定水刀的結構需要有自鎖功能,并且在旋轉刀具的時候,需要很大的扭矩,速度低,這樣才能使水刀安全的工作,不工作時能夠精確的達到預定位置。復合切割機器人采用的是蝸輪蝸桿電機,其電機有具備散熱效果的凹凸外表面,振動低,溫度升高慢,沒有噪聲,良好的密封性,適應工作環境速度快,該機器核心零部件采用的是耐磨材料,而且受過特殊熱處理,具有加工和傳動精度高、平穩性好、體積小、承載能力大和壽命長等優勢。
2.3 工業相機的選型
復合切割機器人采用維視MV-EM120M/C工業相機,該相機體積小巧,可以適應更為嚴苛的安裝條件;采用千兆以太網接口,理論支持100 m傳輸距離;采用大型數據包形式傳輸,減少對中斷的處理,性能更加穩定;采用高品質感光器件,較低的功耗及優良的算法,使圖像清晰、低噪聲、色彩還原度好;支持1路外觸發輸入,可從IO卡/PLC等設備中獲取控制信號,提高圖像獲取同步性;支持1路信號輸出,可隨曝光時間或自定義輸出;CMOS相機支持AOI/ROI進行局部曝光,并提高采集幀率;支持斷網續傳功能,在網絡斷開重新連接時,可自動繼續工作;機身自帶緩存,支持交疊外觸發,幀率更高,丟包率更低; 兼容VisionPro、MATLAB等第三方圖像處理軟件;全面支持Win8、Win10操作系統。這些特點將會非常有效地處理工業相機拍攝到的石材信息,為后面做復合切割機器人的離線編程計仿真模擬提供了重要數據。
3 仿真模擬
該文主要采用的是俄羅斯的SprutCAM離線編程軟件,該軟件有許多工業機器人應用模塊,例如切割、鋸切等。因為SprutCAM軟件中只有市場非常常見且應用比較多的機器人,所以首先需要進行復合切割機器人機器庫的建立,又因為KUKA機器人只能識別G代碼,所以需要編寫后處理文件,這樣可以將SprutCAM軟件生成的程序轉化為G代碼。先將復合切割加工機器人導入SprutCAM軟件中,然后將相應的石板拼花模型和工件材料模型導入進去,選擇鋸切或水刀切割加工工程,調整工程中機器及工件設定、加工外形或曲面、一般屬性、進階參數、進刀或退刀控制、刀具、轉速或進給率、工程轉換、刀具路徑模板、材料范圍、工件裝夾等參數,然后進行復合切割機器人刀具軌跡的計算,最后直接生成程序代碼。如果在仿真模擬過程中出現撞刀、復合切割機器人姿態不好等問題,可以進行優化,以獲得最優的切割路徑、切割速度和切割方式。在實際生產過程中,可以通過工業相機及視覺檢測分析平臺組成的視覺系統掃描石材拼花圖案信息的二維碼或者可以直接掃描石材拼花樣品件得到相應的模型,使每個模型都可以標準化并進行生產,這樣在后續的生產過程中可以隨時調取直接進行切割加工。
5 結論
復合切割加工機器人與市場上的三軸橋切機和水切割加工相比,復合切割加工機器人加工可以在三維空間實現位置和姿態的任意轉換,對自由曲面的復雜工件進行精確的三維切割加工,大大拓寬了加工范圍和工藝水平,提高石材切割產量和質量。快速轉換切割方式,在不同水壓力和砂流量下產生不同切割性能,適應多變的加工環境和要求,大幅度提高勞動生產率,對保障人身安全具有重要意義。
參考文獻
[1]晏輝.拼花加工技術[J].石材,1999(12):8-12.
[2]徐鳳,鄧三鵬,劉鋼,等.超高壓水射流切割機器人的研究[J].機器人技術與應用,2012(5):38-42.
[3]吳瑞梅,何秀文.機械設計基礎[M].北京:北京理工大學出版社,2014.
[4]高玉飛,楊陽.石材的機械加工[M].北京:化學工業出版社,2013.
[5]康志涌.談高壓水流切割技術在建筑裝飾中的應用[J].山西建筑,2014(25):124-126.
