基于滑模變的汽車橫擺力矩控制研究
2019-11-29 06:57:04杜顯暉
汽車實用技術 2019年22期
關鍵詞:汽車
杜顯暉
(江鈴股份有限公司車架廠,江西 南昌 330000)
引言
近年來,基于橫擺力矩控制的汽車穩定性研究越來越受到學者們的重視。橫擺力矩的控制性能好壞直接影響到汽車駕駛的穩定性和平順性。針對上述問題,學者們提供了各種汽車橫擺力矩的控制策略。經典的方法有PID 控制、模糊控制、最優控制和滑模變控制等。其中,滑模變結構控制具有較強的魯棒性和抗干擾性,特別適合于非線性系統的控制。由于汽車具有非線性的特性和外部具有多種干擾,故采用滑模變控制器來對汽車的橫擺力矩進行控制是非常合適的。本文使用滑模變控制器對汽車的橫擺力矩進行控制,首先介紹了滑模變控制器的基本原理,再在汽車系統動力學模型的基礎上,使用滑模變控制器對汽車的橫擺力矩進行控制,最后用汽車系統動力學仿真軟件carsim 對基于滑模變控制的汽車橫擺力矩進行動力學仿真,仿真結果證明了本文方法的有效性。
1 滑模控制的原理
設某非線性系統的動力學方程為:

其中,x為狀態變量。
(1)通常點——如圖中A 點所示(2)起始點——如圖中B 點所示(3)終止點——如圖中C 點所示。其中C 點即終止點在滑模變控制中為關鍵點。并稱在切換面s=0 上所有終止點的區域為滑動模態區,簡稱為滑模運動。
當只有在切換面上的點全是終止點時才能使用滑模控制,則在切換面s(x)=0 附近時,有:

式(2)為滑動模態存在的條件。
如果系統的某一點再離切換面很遠處,處在狀態空間的任何一個地方,滑模面必須要能將所有切換面外的狀態點都吸引進入切換面,所以滑動模態的全局到達條件如式(3)所示,其中x可為任意值:

基于式(1)~(3),定義滑模函數:

在切換函數如下所示:

控制函數可寫為:

2 基于橫擺力矩穩定性的滑模控制器的設計
汽車是一種機械結構負載的強耦合非線性系統,在汽車運行過程中,不大可能將所有的物理量都計算出來,只能選取較為關鍵的量進行控制。其中,橫向運動和側向運動對汽車穩定性的影響較大,汽車在橫向運動時會產生側偏的橫向角度,如果橫向側偏角度過大,汽車就會發生翻車的危險。同樣,當汽車的發生了縱向運動并且偏離目標值太大,汽車就會產生質心側偏角。如果汽車的質心側偏角也過大,那么同樣會影響車輛的正常行駛。綜上所述,將汽車的橫擺側偏角和質心側偏角作為控制目標,使用滑模變控制器對汽車的整車動力學特性進行控制。
基于汽車橫擺力矩穩定控制的滑模控制器的步驟為:首先建立整車理想模型,整車理想模型中的輸入為車輪轉角δ以及整車車速u,輸出為質心側偏角β以及橫擺角速度γ;滑膜控制器的輸入信號是β'與β之間的誤差信號,記為(β'-β)、以及γ'與γ之間的誤差信號,記為(γ'-γ),輸出信號是是整車的橫擺力矩Mz。當橫擺力矩計算完畢后,根據橫擺力矩進行轉矩分配,從而保證汽車可以穩定的駕駛。
滑模控制器的切換面為:

對切換面s求導:


則汽車的橫向動力學方程為:

可寫成:

最終可得橫擺力矩Mz應設置為:

3 仿真結果分析

圖1 車輛轉彎行駛的方向盤轉角
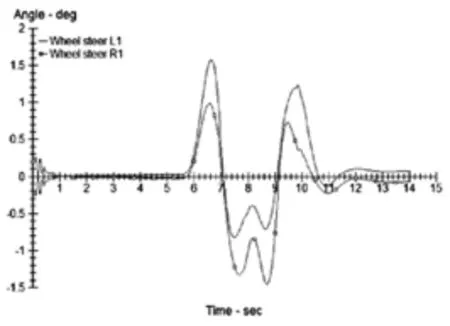
圖2 車輛轉彎時的車輪轉角
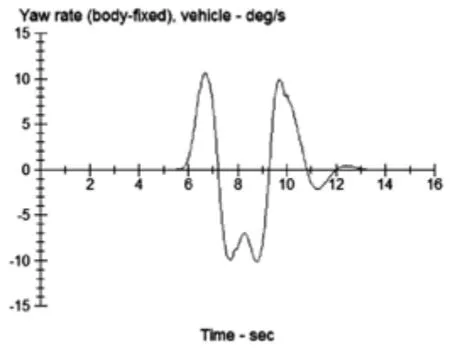
圖3 車輛轉彎時的橫擺角速度
使用汽車系統動力學軟件carsim 進行上述理論的仿真。仿真參數設置為:汽車的總質量為789 公斤,車輪半徑R為0.292 米,汽車質心與前軸的軸距1.103 米,汽車質心與后軸的軸距1.244 米,汽車質心高度0.54 米,彈簧承載的質量747公斤。
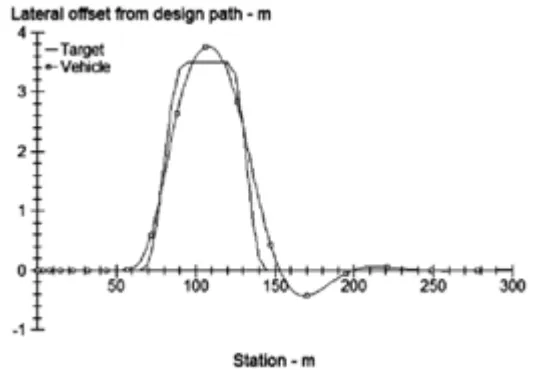
圖4 車輛雙移線實驗時的行駛軌跡
圖1 、圖2 和圖3 分為轉矩分配系統控制的情況下車輛轉彎行駛的方向盤轉角、車輪轉角和橫擺角速度的變化曲線。圖4 為車輛雙移線實驗時的行駛軌跡。可以看到,使用滑模變控制器可以對汽車橫擺力矩進行有效的控制,從而保證了整車轉向時的穩定性。
4 結論
本文使用滑模變控制器對汽車的橫擺力矩進行控制,從而保證了整車行駛的穩定性。介紹了滑膜變控制器的基本理論,設計了基于橫擺力矩穩定性的滑膜變控制器,并在汽車系統動力學軟件carsim 上進行了仿真,仿真結果證明了本文方法的有效性。
猜你喜歡
人民交通(2020年22期)2020-11-26 07:36:44
小學生優秀作文(低年級)(2020年4期)2020-07-24 08:31:08
汽車與安全(2019年9期)2019-11-22 09:48:03
汽車與安全(2019年8期)2019-09-26 04:49:10
汽車與安全(2019年5期)2019-07-30 02:49:51
汽車觀察(2019年2期)2019-03-15 06:00:06
汽車與新動力(2018年2期)2018-05-09 00:31:56
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
