基于BP神經網絡的動車組智能化控制和診斷研究
2019-11-29 01:37:00樊會星
鐵路計算機應用 2019年11期
關鍵詞:模型
樊會星,鄒 穎
(1. 中車青島四方車輛研究所有限公司,青島 266031;2. 中車唐山機車車輛有限公司,唐山 063035)
在列車運行過程中,車輛的狀態往往不只受單一因素的影響,而是多個因素疊加耦合作用的結果,例如,由于車速變化、車廂外溫變化和電機溫度升高等共同作用引起的溫度傳感器故障等。另外,由于列車電磁環境復雜,相關傳感器受干擾導致采集值突變的現象也時有發生。這些情況可能導致列車控制系統邏輯運行判斷錯誤,產生故障誤報和錯誤控制命令,影響行車安全。因此采用單一元素信息進行控制和診斷,可能會導致列車誤動作和誤診斷,故障發生時也不能快速準確定位到故障源[1]。此外,列車控制的故障診斷只是依據當前列車狀態采集信息進行實時診斷,不能提前進行預判來避免相關損失。綜上,采取更有效的方法對列車相關采集信息進行處理和應用是很有必要的。
人工神經網絡由于具有優良的非線性逼近特性、較好的魯棒性和容錯性、大規模并行處理能力以及自學習、自組織和自適應性,使其在信號處理和工業控制等領域都得到了廣泛的應用[2]。BP(Back Propagation)神經網絡是人工神經網絡中應用多、具有實用價值的算法之一。如文獻[3]采用BP 神經網絡對船艙溫度進行預警,文獻[4]提出應用BP 神經網絡對鐵路事故進行較長期預測,文獻[5]利用 BP神經網絡進行鐵路客運設備故障監測。基于以上研究,本文提出采用BP 神經網絡的方法對列車相關狀態采集信息進行分析處理,并結合現有車輛控制邏輯實現動車組智能化控制和故障診斷監控,借此提高列車控制和診斷的準確性。
1 車輛信息數據預處理
1.1 研究對象選取
目前,動車組列車車輛狀態采集的相關信息眾多,如涉及車廂內部環境的溫度、煙霧濃度等,涉及列車車輛運行安全的牽引電機溫度、齒輪箱溫度、軸承溫度和變壓器油溫等,涉及車輛運行狀態的速度、線電壓和線電流等。這類信息的處理方式和實際應用方式基本類似,本文選取牽引電機溫度作為研究對象,采用BP 神經網絡算法進行診斷和控制,其它類似信息采用相同方法進行建模和訓練即可。
1.2 數據預處理
動車組每節動車上安裝有4 臺牽引電機,每臺牽引電機上安裝有3 個溫度傳感器和1 個速度傳感器,3 個溫度傳感器分別測量驅動端軸承溫度、非驅動端軸承溫度和定子溫度,列車網絡控制系統通過速度及溫度條件對牽引電機冷卻風機的啟停和高低速進行控制,從而達到冷卻牽引電機的目的。本文依據實際數據的有效性對獲取的傳感器數據信息進行預處理,電機溫度的合理范圍是-50℃~300℃,數據的具體預處理方法如下[6]:
(1)缺失的數據用相鄰時刻數據插補;
(2)小于采集合理范圍最小值的數據以最小值代替,大于最大值的數據以最大值代替;
(3)對于不合理數據值沿用前一時刻數據。
通過以上數據預處理,預先過濾掉錯誤的數據信息,增強采集數據的有效性。
2 神經網絡模型的建立與運用
2.1 BP神經網絡概述
BP 神經網絡的拓撲模型包括輸入層、隱含層和輸出層。BP 神經網絡算法包括信號的前向傳播和誤差的反向傳播2 個過程,即計算輸出誤差時按從輸入到輸出的方向進行,而調整權值則從輸出到輸入的方向進行。BP 神經網絡的訓練過程如下:
(1)計算輸出層的實際輸出與期望輸出間的誤差;
(2)通過BP 神經網絡將誤差信號通過隱含層向輸入層逐層反轉,并將誤差分攤給各層的所有節點,從而獲得各層的誤差信號;
(3)通過不斷調整各層權值,使誤差沿梯度方向下降;
(4)經過反復學習訓練,確定與最小誤差相對應的BP 神經網絡權值,完成網絡模型的訓練[7]。
2.2 模型建立
本文采用BP 神經網絡對牽引電機的溫度值進行預測和處理。結合理論與應用經驗分析結果,采用3層BP 神經網絡模型,將列車速度、車廂外溫度、牽引力大小、牽引電機電流輸入、牽引電機風扇啟動全速和牽引電機啟動半速作為輸入層節點,牽引電機定子溫度、牽引電機驅動端溫度和牽引電機非驅動端溫度作為輸出層節點。牽引電機溫度的BP 神經網絡模型如圖1 所示。
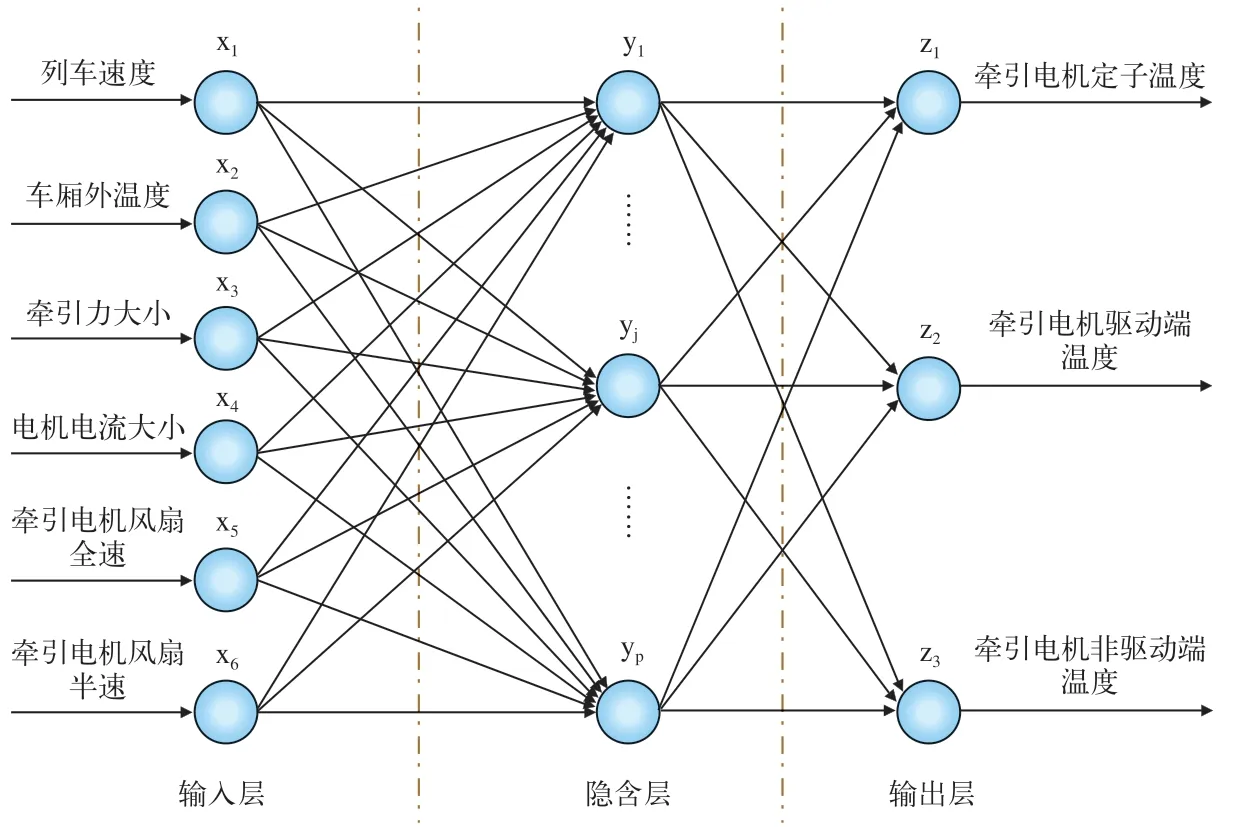
圖1 牽引電機溫度的BP 神經網絡模型示意圖
設定輸入層節點為xi(i=1,…,6),隱含層節點為yj(j=1,…,p),其中,p為隱含層的節點總數,輸出層的節點為zk(k=1,2,3)。輸入層節點xi到隱含層節點yj的權值為ωij,隱含層節點yj到輸出層節點zk的權值為ωjk,對于這兩種權值中的任一值采用ωab進行通用表示,模型期望輸出(測得的實際輸出)為rk(k=1,2,3),理論輸出與期望輸出間的誤差為:

輸出節點的誤差函數定義為:

BP 神經網絡的算法推導[8]是調整每個權值ωab的大小、使得輸出誤差E逐步減小的過程,計算其導數為:

誤差調整大小為:

其中,η為學習效率,且0 <η<1。
對于第k個輸出層節點:
其中,δk=(rk-zk)zk(1-zk)。
對于第j個隱含層單元:

根據上述運算過程來調整BP 神經網絡模型的權值系數,建立起完整的BP 神經網絡訓練模型,通過該模型可以計算出某一特定數據采集周期的每節車廂的牽引電機定子溫度、驅動端溫度和非驅動端溫度數值。
2.3 智能控制與診斷
假定根據前述訓練模型獲得t時刻的輸出值為zt,而傳感器反饋的實際采集值為Zt,則誤差為:)

假設最終用于列車控制邏輯判斷是否為傳感器故障或超溫等的溫度應用值為Ot,該值的判斷邏輯分為以下幾種情況。
(1)當Δzt小于設定閾值θ時,則認為采集值有效,可以將采集值和輸出值分別乘以加權系數再求和,作為最終的溫度應用值Ot。

其中,p為加權系數。
(2)當Δzt值大于設定閾值θ時,則認為采集值異常。如果前一個周期采集值有效,則該周期值的溫度應用值采用前一周期的采集值和本周期預測值分別乘以加權系數再求和。

(3)當Δzt值大于設定閾值θ,且Δzt-1值也大于閾值θ時,則判定溫度傳感器故障,控制邏輯采取顯示屏報警,限速,切除牽引、斷主斷降弓等措施保障車輛安全。
另外,可以將采集數據通過遠程傳輸主機上傳到地面列車云數據庫。通過大數據運算,判斷Δzt的變化趨勢,提前發現列車隱性故障和存在問題,便于列車維護。
3 實驗驗證
3.1 模型訓練與測試
通過列車數據記錄裝置獲取車輛總線全部數據作為實驗數據源,由于數據記錄裝置每隔100 ms 進行一次記錄, 較短時間內數據變化很微小,因此進行預處理時數據的選取間隔為1 min,同時過濾掉重復數據和無效數據。在處理后的數據包內選取1 000 組數據進行訓練,選取200 組數據進行效果驗證。本文選取電機定子溫度值進行效果驗證,選用Matlab中的神經網絡工具箱進行神經網絡的訓練, 模型的具體實現步驟如下:
(1)將訓練樣本數據歸一化后輸入網絡,設定網絡隱含層和輸出層傳遞函數分別為tansig 和purelin 函數, 網絡訓練函數為trainlm 函數;
(2)隱含層神經元數初始值為7,網絡迭代次數為3 000 次,期望誤差為0.000 1 ;
(3)完成參數設定后, 開始訓練網絡。
由于Matlab 工具箱每次訓練的初始權值和閾值是隨機產生的,因此相同參數下每次驗證的輸出結果也略有不同,隱藏層節點數分別為7 ~10 的輸出結果如圖2 所示。
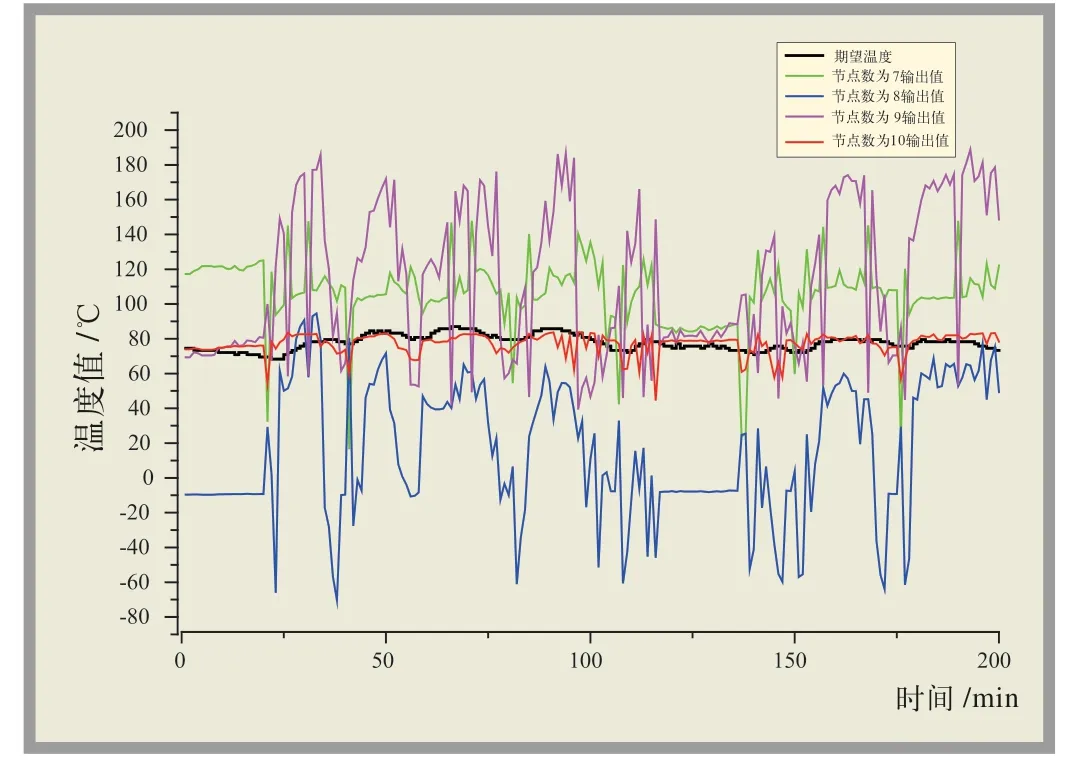
圖2 BP 神經網絡模型輸出結果
3.2 結果分析
根據多次實驗訓練發現,為了獲取最優輸出結果,需要多次調整參數并選取最佳訓練模型。由圖2可以看出,在訓練過程中,隱含層的節點數調整為10 時的訓練效果最佳,與期望值最為接近,誤差在10℃以內,該誤差對于牽引電機的溫度判斷在可接受范圍之內。這表明利用BP 神經網絡模型綜合列車各種運行信息進行預測,并結合傳感器采集值綜合判斷得出車輛狀態信息以避免單純依靠傳感器采集導致數據異常情況的方法是可行的。本方案可有效過濾異常的傳感器采集數值,避免車輛運行過程中的誤動作和誤診斷,提高車輛控制和診斷的準確性。
4 結束語
本文針對由列車復雜環境等導致的傳感器采集數據異常問題提出了以列車各種運行信息作為輸入,通過采用BP 神經網絡算法進行模型訓練來預測列車狀態信息,并將輸出結果融入到現有車輛運行控制邏輯中,可有效提高列車控制和診斷的準確性,避免車輛誤動作和誤診斷。采用列車實際運行數據進行了大量的訓練得出較優的網絡模型,將模型預測信息與實際采集信息進行對比,驗證了其良好的使用效果。
本方案單純采用BP 神經網絡模型進行計算,存在精確度不足的問題,在后續研究中可以融合深度學習和遺傳算法等方法優化權值和閾值選擇等來進行改進。另外,后續研究中可結合大數據和云計算等手段來預測車輛運行的狀態和趨勢,提前發現隱性故障并采取積極措施來有效降低列車故障率,保障列車運行安全。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19