
車載導航接收機性能測試與分析
2019-11-30 03:47:08竇汝鵬孫佳駿吳飛燕
汽車電器 2019年11期
竇汝鵬,孫佳駿,吳飛燕
(中國汽車技術研究中心有限公司,天津 300300)
智能網聯汽車 (Intelligent and Connected Vehicle,ICV)是在安全、舒適的前提下,通過先進的傳感器等裝置,結合現代通信技術實現替代人駕駛的新一代汽車。其技術包括多變環境感知、復雜情況智能決策、車間信息共享協同處理等[1]。高精度定位作為汽車位置獲取的關鍵技術,可以提高車輛實時位置信息的準確度,是智能網聯汽車正常工作的重要支撐。導航接收機作為用戶端是衛星導航系統中至關重要的一部分,為使用者提供定位、授時等服務,因此導航接收機的性能測試顯得尤為重要。本文依據GB 17691中附錄Q遠程排放管理車載終端的技術要求及通信數據格式中針對定位功能的要求,著眼于車載終端導航接收機,從仿真測試和道路測試兩個方向研究了導航接收機的性能測試方法。
1 接收機誤差分析
導航接收機定位誤差來源有很多,大體可分為3個大類:一是由于衛星自身原因產生的誤差,包括衛星鐘差、星歷誤差等;二是在信號傳播時,由于環境等因素影響產生的誤差,包括相對論效應誤差、多路徑效應誤差、電離層延遲等;三是接收機本身產生的誤差,包括接收機鐘差、觀測噪聲誤差、天線相位中心誤差[2]等。
在實際應用中,可以采取差分技術或二項式模擬衛星鐘誤差來削弱衛星鐘差[3],通過導航電文中的電離層改正模型減少電離層折射誤差[4],利用天線方向圖的空間特性來降低多路徑效應誤差[5]等。在本試驗中,為了減少誤差帶來的不確定性,通過仿真試驗輸出模擬衛星信號,減少衛星本身產生的誤差和傳播誤差,獲得接收機在理論環境下的性能;在實車道路測試中,通過利用工裝精確計算天線距離、功分器等方式盡量減少誤差對實驗數據帶來的影響。
2 接收機性能仿真測試
2.1 實驗原理
仿真測試是在實驗室中通過全球導航衛星系統 (Global Navigation Satellite System,GNSS)衛星模擬器模擬產生靜態/動態GNSS衛星仿真信號、動態路徑場景仿真信號等信號,直接將信號輸出至測試接收機的測試過程。仿真測試可避免傳播誤差、噪聲誤差等誤差影響。筆記本通過串口與測試機連接,可直接讀取接收機定位數據,與GNSS衛星模擬器發出的數據對比,直觀地測試出接收機在理想環境下的性能。仿真測試設備連接如圖1所示。
目前設計的仿真測試項目有NMEA-0183消息輸出測試、冷啟動首次定位時間測試、重捕獲時間測試、捕獲靈敏度測試、跟蹤靈敏度測試、靜態定位精度測試、動態定位精度 (空曠區域)、動態定位精度 (陰影區域)和干擾測試。實驗前,通過對導航接收機的性能指標進行研究,提出滿足實際使用情況的合理指標作為實驗對照,以此判定接收機性能。
2.2 NMEA-0183消息輸出仿真測試
2.2.1 NMEA-0183標準
NMEA是美國國家標準協會 (American National Standards Institute,ANSI)的成員之一,也是ANSI授權的標準制定者之一。目前NMEA制定了3項海洋數據接口標準,其中NMEA-0183接口標準定義了設備電信號要求、數據傳輸協議、時間格式等,在全球各行業領域均得到了應用。2018年11月,NMEA發布了NMEA 0183-V4.11,對GNSS的部分進行更新,除了全球4大導航定位系統外還包括日本準天頂衛星系統 (Quasi-Zenith Satellite System,QZSS)、印度區域導航衛星系統 (Indian Regional Navigation Satellite System,IRNSS)的接口說明。同時,它還允許一些特定的設備制造商對其設備 (如Garmin GPS-38、Trimble Ensign XL)通信自行定義協議,具有較高的靈活性和通用性,因此被廣泛地使用[6]。
在接收機上,常見的NMEA-0183消息輸出有GGA(GPS定位信息)、GLL(大地坐標信息)、GSV(可見的衛星信息)、GSA (衛星DOP值信息)等。
2.2.2 仿真測試
本項測試的目的是驗證接收機能否可以正常輸出相應的導航數據,以方便進行后續的性能評估。測試時將被測接收機接入GNSS性能測試平臺,設置GNSS衛星導航模擬器位置信息及時間信息。啟動GNSS模擬器場景仿真,設置所有衛星輸出功率為-130dBm。打開車載導航終端定位開關,等待被測接收機定位成功,保持定位狀態2min。設備輸出信息如圖2所示,表明被測設備消息輸出功能正常。
2.3 冷啟動首次定位時間測試
當設備完全清空歷史信息,即概略時間、概略位置、星歷、歷書未知,開機需要重新搜索衛星并嘗試定位的情況下,從通電后到有效接收到第一個可用的衛星導航定位數據所花費的時間稱為冷啟動。首次定位時間用于考量導航衛星接收機對衛星信號捕捉的快慢程度,從而體現衛星導航接收機信號搜索過程的效率。
測試時將被測接收機接入GNSS性能測試平臺,設置GNSS衛星導航模擬器位置信息及時間信息。清除被測設備所有已知的星歷信息、日歷信息和位置信息,使設備設置為冷啟動測量的狀態,關閉被測接收機定位開關。啟動GNSS模擬器場景仿真,設置所有衛星輸出功率為-130dBm。打開車載導航終端定位開關,開始計時;等待被測接收機定位成功,并且水平定位精度小于100m時,停止計時,記錄定位時長;如果定位超時則記錄定位失敗一次。關閉定位開關,停止衛星場景仿真。重復上述過程獲得9組數據見表1。
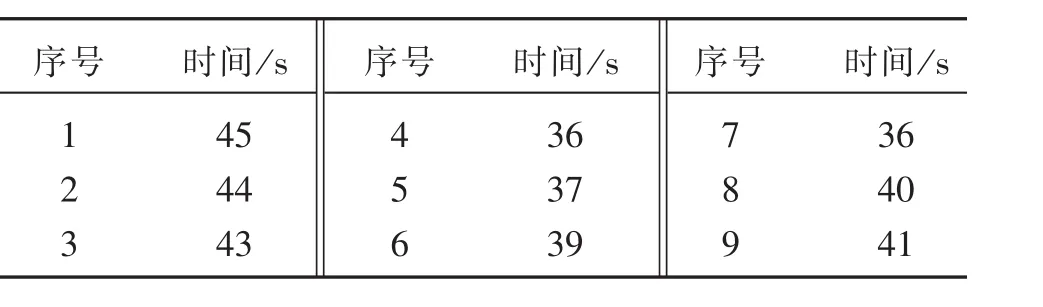
表1 冷啟動首次定位時間測試結果
對測量獲得的9組冷啟動首次定位時間求取算術平均值:

式中:Ti——第i次測量獲得的冷啟動首次定位時間;n——測量總數9次。
同時計算冷啟動首次定位時間的標準差:

可知冷啟動首次定位時間的平均值為40.11s,標準差為3.21s,滿足實驗前預設冷啟動首次定位時間≤60s的要求,且定位成功率為100%。
2.4 重捕獲時間測試
重捕獲時間指用戶設備在接收的導航信號短時消失后(如進入隧道),從信號恢復到重新有效定位所花費的時間。重新捕獲時間也同樣應用于對衛星導航接收機信號捕獲能力的衡量上,但與首次定位時間相比,這項指標突出接收機在信號暫時失鎖后的恢復能力。
測試時將被測接收機接入GNSS性能測試平臺,設置GNSS衛星導航模擬器位置信息及時間信息。啟動GNSS場景仿真,設置所有衛星輸出功率為-130dBm,開啟被測GNSS終端的定位開關。等待被測設備定位成功,保持定位狀態1min。關閉被測設備的定位開關,關閉GNSS衛星導航模擬器的輸出信號,時長30s。打開GNSS衛星導航模擬器的輸出,打開定位開關,開始計時;當定位成功并且定位水平精度小于100m,停止計時,記錄定位時長;如果定位超時,記錄定位失敗1次。關閉定位開關,停止衛星場景仿真。重復上述過程獲得9組數據如表2所示,對測量獲得的9組重捕獲時間根據公式 (1)和 (2)求取算術平均值、標準差。可知重捕獲時間的平均值為3.04s,標準差為0.74s。滿足實驗前預設重捕獲時間≤5s的要求。

表2 重捕獲時間測試結果
2.5 靜態定位精度測試
本測試目的是驗證車載GNSS導航設備在冷啟動定位成功后的定位精度。將被測接收機接入GNSS性能測試平臺,設置GNSS衛星導航模擬器位置信息及時間信息。清除被測設備所有已知的星歷信息、日歷信息和位置信息,使設備設置為進行冷啟動測量的狀態,關閉被測接收機定位開關。啟動GNSS模擬器場景仿真,設置所有衛星輸出功率為-130dBm。打開車載導航終端定位開關,等待定位成功。保持定位成功狀態1min,記錄1min內的定位數據,并計算定位數據的平均精度,并與參考位置坐標進行比較。圖3為GNSS衛星導航模擬器設置樣例,表3展示了被測接收機輸出位置坐標與參考位置坐標的比較,二者吻合,滿足預設要求。

圖3 GNSS衛星導航模擬器設置樣例
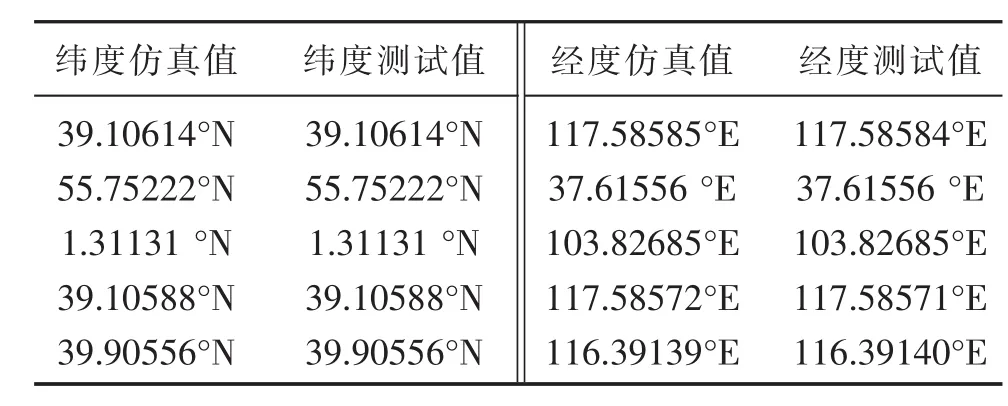
表3 靜態定位精度測試結果
3 接收機動態定位性能道路測試
由于仿真測試是通過衛星信號模擬器模擬產生衛星信號發送給接收機,產生的數據是理想環境下接收機的工作指標,從上文中也不難看出靜態定位精度與設置值相比幾乎完全相同。為了更好地體現接收機在實際工況下的性能指標,本文設計道路測試方案測量接收機在實車動態環境下的定位精度,為接收機性能評價提供依據。
3.1 實驗原理
實車測試采用高精度RTK差分定位接收機作為基準,測試車輛作為載體,將被測終端所用天線和高精度RTK差分定位接收機所用天線安裝在運動載體上,兩天線的相位中心相距不超過0.2m,測試車輛按照規劃路線行駛,不少于15min,測試過程中被測終端/持衛星信號鎖定,期間包括加速、減速、轉彎、掉頭等操作,最高車速不超過80km/h。期間使用高精度RTK差分定位接收機獲取運動載體在運動過程中各時刻的標準點坐標,并以1Hz更新率采集被測終端輸出的位置坐標。結束后,與高精度RTK差分定位接收機提供的標準點坐標相比較,求誤差均值,得到被測終端的定位誤差,驗證是否滿足規定指標。路測原理如圖4所示。
3.2 實驗要求
道路測試要求在測試道路上布置RTK差分基站,供RTK差分定位接收機使用。RTK差分基站放置點經過測繪局測繪得到準確位置信息。在差分基站覆蓋范圍內,包含開闊場地及樓房遮擋場地,測試車輛可做加減速、拐彎等行駛模式。
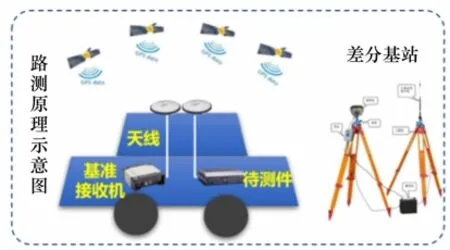
圖4 路測原理
同時要求準備有足夠空間及供電接口 (或蓄電池)給基準接收機、待測件等設備供電的測試車輛。測試車輛車頂能夠安裝衛星天線及與差分基站之間通信的通信天線。
RTK差分定位接收機見圖5,RTK差分定位天線見圖6。

圖5 RTK差分定位接收機
實驗環境上,要求實驗在水平精度因子 (HorizontalDilution OfPrecision,HDOP)≤3或位置精度因子 (Positioning Dilution Of Precision, PDOP)≤4的條件下測試,以確保實驗結果的普適性。

圖6 RTK差分定位天線
3.3 測試數據分析
道路測試結束后,可分別獲取到RTK差分定位接收機和被測接收機的時間、經度、緯度數據,并在時間上對準。已知兩點經緯度可利用公式計算兩點間距離,本次實驗采用功分器輸出兩路同一天線產生的衛星信號,可認為天線相位中心間距為0。
以RTK差分定位接收機提供的經緯度信息為真值,分析實驗數據。依據公式 (3)通過兩點經緯度計算距離:

式中:a——基準值和測試值的緯度弧度制差值;b——基準值和測試值的經度弧度制差值;α——測試值的緯度弧度制;β——測試值的緯度弧度制;6378.137——地球半徑,km。
在經度弧度制上,被測接收機與RTK差分定位接收機對比結果:誤差數據主要在1.50E-07內起伏,個別數據誤差達到2.50E-07。在緯度弧度制上,被測接收機與RTK差分定位接收機對比結果:誤差數據主要在2.00E-07內起伏,個別數據誤差達到4.00E-07。在換算后的距離上,被測接收機與RTK差分定位接收機對比結果:誤差數據主要在1.5m內起伏,個別數據誤差達到2m,最終平均誤差為1.46m,滿足預設定位精度。對比結果如圖7~圖9所示。

圖7 測試值與基準值經度差對比圖

圖8 測試值與基準值緯度差對比圖
4 總結與展望
本文首先說明了導航接收機性能測試的重要性,之后針對性能測試方法進行了研究,提出了仿真測試和道路測試具體的測試項目及方法,并列舉了部分實驗數據進行分析比較。尤其在道路測試中通過測試數據與基準數據的比較,定量地分析了車載導航終端實際運行中的誤差情況。同時,實驗中還有很多問題需要進行更深的研究。如:通過功分器輸出的兩路衛星信號與兩個接收機各自使用原天線相比是否會產生較大的誤差。針對這個問題考慮使用工裝確定兩天線相位中心距離,精確計算誤差。隨著“中國制造2025”等發展戰略的提出,可以預見智能網聯汽車產業將會蓬勃發展,相關性能測試工作將會為產業的健康發展提供堅實的基礎。

圖9 測試值與基準值距離差對比圖
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
中華手工(2017年2期)2017-06-06 23:00:31
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
中外會展(2014年4期)2014-11-27 07:46:46
環球時報(2010-02-11)2010-02-11 13:34:15
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
