動車組受電弓視頻監控系統智能識別技術研究
2019-11-30 12:58:39馬文龍
科技創新導報 2019年18期
馬文龍

摘? ?要:受電弓作為動車組傳遞并獲取能源的關鍵部件,其工作狀態直接影響列車的運行。本文介紹了動車組受電弓視頻監控系統智能識別技術現狀,運用圖像識別技術實現受電弓狀態異常分析、識別及提示功能,對車輛運用過程中及時發現處理受電弓狀態異常具有重要的指導意義,可有效提高動車組運行的安全性和可靠性。
關鍵詞:受電弓? 視頻監控? 智能分析? 圖像識別
中圖分類號:U26? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文獻標識碼:A? ? ? ? ? ? ? ? ? ? ? ? 文章編號:1674-098X(2019)06(c)-0043-02
受電弓作為動車組關鍵部件,直接影響列車運行的安全性和可靠性,任何故障或損傷如不能及時發現并處理都有造成列車中斷的風險。目前在動車組批量運用的弓網檢測手段主要為車載接觸網運行狀態檢測裝置(簡稱3C系統)和受電弓視頻監控系統。3C系統具備智能分析功能,僅有少數車輛加裝,主要用于監控接觸網線路狀態;而受電弓視頻監控系統為車輛標配,目前僅具備視頻記錄、查看功能,無故障報警機制,僅憑機械師經驗很難定量描述故障現象并采取進一步措施。
為及時發現并降低受電弓狀態異常故障對車輛引起的次生災害,本文結合圖像識別技術,利用受電弓視頻監控圖像分析弓網結構,實現智能識別預警功能,便于隨車機械師及時發現并處理受電弓異常狀態,提高行車安全性。
1? 受電弓視頻監控系統簡介
受電弓視頻監控系統由受電弓攝像機、監控屏、受電弓視頻監控服務器、智能分析主機(預留)組成。用于運行途中實時監視車頂受電弓及接觸網工作狀態,并兼顧受電弓附近高壓設備工作狀態。
預留的智能分析主機采用一體式封裝,主要由電源模塊、智能報警輸出模塊、交換機板、智能工控機(用于數據分析、處理、取流)、存儲硬盤(存儲故障數據)組成,可自動實時識別受電弓異常狀態,在監控屏處彈屏報警,為隨車機械師處理異常降弓等受電弓故障提供輔助的監視視頻和分析圖像。
2? 受電弓視頻監控智能識別分析
受電弓視頻監控智能分析主要可實現火花檢測、結構異常檢測。智能分析主機將報警圖片按照故障類別進行自動篩選,將不同類型的報警信息傳輸到監控屏,實現智能分析報警功能。
2.1 火花檢測
弓網狀態受多方面外力影響,當外力致使接觸中斷的瞬間,兩者之間迅速形成大電壓差,因而形成空氣擊穿放電,接觸點溫度隨放電現象急劇上升從而產生電弧、火花。
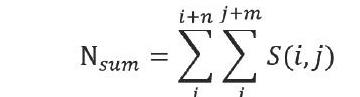
電弧、火花在圖像中表現為局部呈現近似圓形高像素值區域,區域內平均像素值遠遠高于其他區域,為機器視覺提供了很好的識別目標,故使用區域峰值檢測方式實現對電弧、火花檢測。設置m×n矩形窗口,在二值化圖像中進行遍歷,并統計每一個區域的累加值。
其中S(i,j)為圖像中的任意像素點,Nsum為每一個區域的累加值。選區最大N值作為一幀圖像的電弧區域像素值,在后續高層次的目標識別中進行數值分析,實現火花檢測,如圖1所示。
2.2 受電弓結構異常檢測
受電弓結構異常指所有的降弓、碳滑板部分脫落、碳滑板水平度傾斜超過5°(可手動設置,5°~15°可選)、受電弓支架夾角變化超過10°(可手動設置,10°~15°可選)以及受電弓嚴重變形的故障,輸出報警信息。
受電弓結構檢測通過提取結構特性與數據庫中原有狀態特性進行對比分析,確認當前受電弓工作狀態。圖像特征提取成為受電弓結構分類的依據,采用BRISK算法實現。
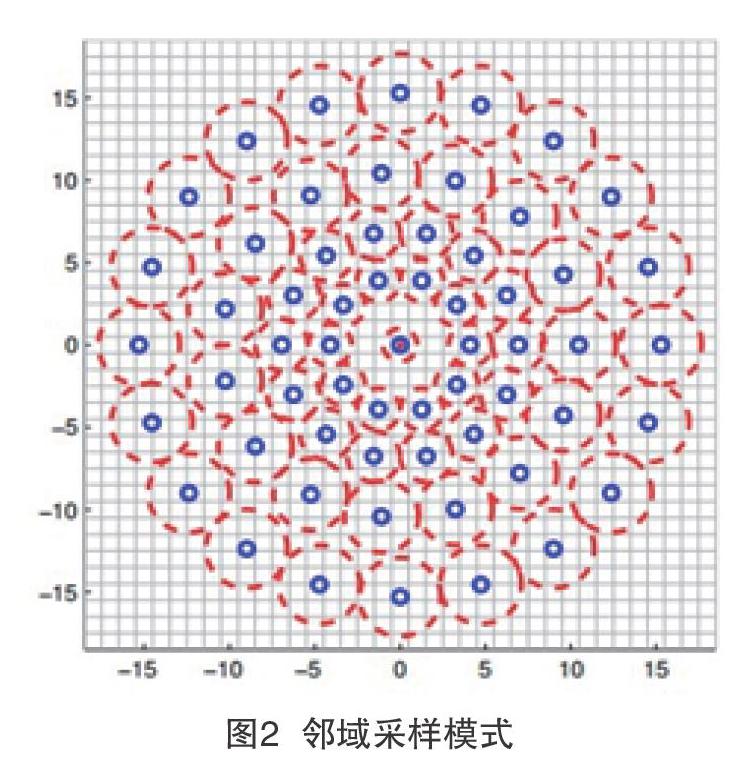
BRISK算法通過利用簡單的像素灰度值比較,進而得到一個級聯的二進制比特串來描述每個特征點。算法采用了鄰域采樣模式,即以特征點為圓心,構建多個不同半徑的離散化Bresenham同心圓,然后在每一個同心圓上獲得具有相同間距的N個采樣點,如圖2所示。
N個采樣點兩兩組合成一對,可構成N(N-1)/2個采樣點對,得到N(N-1)/2個距離的集合(包含長、短距離子集),考慮其中短距離子集中的512個短距離點對,進行二進制編碼,獲得了一個長度為512個比特位向量,通過比較漢明距離完成圖像匹配。
2.3 智能分析現狀
智能分析算法的檢測模型是在線下統計獲得的,通過搜集大量的受電弓形態及火花數據,采用深度學習的方式進行特征統計,得到可用于檢測的受電弓模型。不同車型的受電弓結構不同,像機拍攝角度不同,反應到圖像上的受電弓結構特征存在較大差異,為提高準確度需要針對性的訓練檢測模型。隨著數據量的增多,對受電弓檢測模型不斷完善,檢測效果也會相應提升。
3? 結語
受電弓視頻監控系統可在車輛運行過程中對受電弓、接觸網及車頂高壓設備進行狀態監視。通過智能分析主機可實現實時故障檢測及報警功能,為隨車機械師處理受電弓異常提供輔助的圖像監控功能,減少故障后機械師登頂檢查,對提高列車運行的安全性可靠性具有重要意義。
參考文獻
[1] 羅世偉,鄒開耀.視頻監控系統原理及維護[J].電子工業出版社,2007(6).
[2] 厙亞斌.新型動車組旅客信息系統的研制[M].北京:鐵道車輛,2017.
[3] 厙亞斌,劉金柱,王雙全,等.鐵總運[2015]360號動車組受電弓視頻監控系統暫行技術條件[Z].2015.