基于CAN總線的柴油機通信模塊設計與實現
2019-11-30 12:58:39代宏澤
科技創新導報 2019年18期
代宏澤
摘? ?要:開發了一種基于CAN總線的內燃機車柴油機控制模塊,重點介紹了硬件的模塊化設計、功能的實現方式及CAN總線在模塊中的應用。該模塊實現了機車微機與柴油機控制器相互間的數據交換,能夠完成包括4~20mA電流、PWM脈沖頻率、PWM占空比等多種方式的柴油機轉速調節、數字信號采集、觸點輸出等多種功能,已驗證應用,具有良好的可靠性。
關鍵詞:CAN總線? 硬件設計? 機車控制? 轉速調節? 柴油機
中圖分類號:TN919? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻標識碼:A? ? ? ? ? ? ? ? ? ? ? ?文章編號:1674-098X(2019)06(c)-0092-03
柴油機是內燃機車的核心部件,目前,大部分柴油機控制器ECU都是通過CAN總線與外部設備進行數據交換。內燃微機控制系統LCS是整車控制系統,它的主CPU通過背板并行總線與各種IO模塊進行數據交換,并通過Lonworks或者MVB總線與機車上的顯示器通信,所以,柴油機ECU和機車控制系統、顯示器之間沒有直接的數據交換方式。因此,如何實現機車控制系統LCS對柴油機的控制?如何將柴油機的各種參數人機交互至顯示器上?本文開發的柴油機通信模塊就能夠解決上述問題。
1? 系統概述
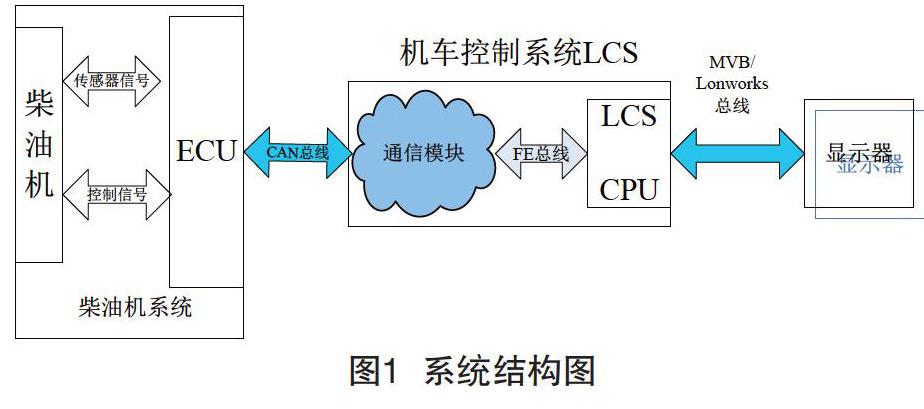
柴油機通信模塊是基于機車控制系統LCS開發的,它放置于控制機箱中,與主控CPU通過系統背板并行總線進行數據交換,在模塊中開發CAN通信接口,與ECU之間通過CAN接口通信。它的作用就是在柴油機控制器ECU與機車控制系統LCS之間架起一座橋梁,實現ECU與LCS、顯示器之間的數據交換,系統結構如圖1所示。
2? 功能描述
2.1 模塊功能需求
根據柴油機ECU的對外接口和LCS微機對外接口要求,對該模塊做了如下功能要求。
(1)并行總線接口。
與微機主控板之間通過并行總線通信進行數據傳輸,并行總線包括數據總線DB[7:0]、地址總線AB[15:0]、控制總線如RD、WR、CS等信號。
(2)CAN總線接口。
具有2路CAN總線接口,與柴油機控制器ECU之間通過CAN總線實時通信交互控制,進行運行參數及故障信息的傳遞。
(3)IO處理。
對柴油機上的24V數字開關量進行采集并能夠觸點輸出。檢測24V司機手柄輸入信號,并通過驅動常閉數字觸點斷開實現保護。
(4)柴油機轉速調節。
接收來自司控器的檔位編碼信號,將檔位編碼信號轉換為對應的柴油機轉速給定信號,通過4~20mA電流信號控制柴油機轉速,最終由柴油機控制器實現柴油機的調速。
(5)PWM信號驅動。
由微機CPU產生PWM波,驅動外部設備,如(轉速調節、勵磁控制等)。
2.2 總體設計
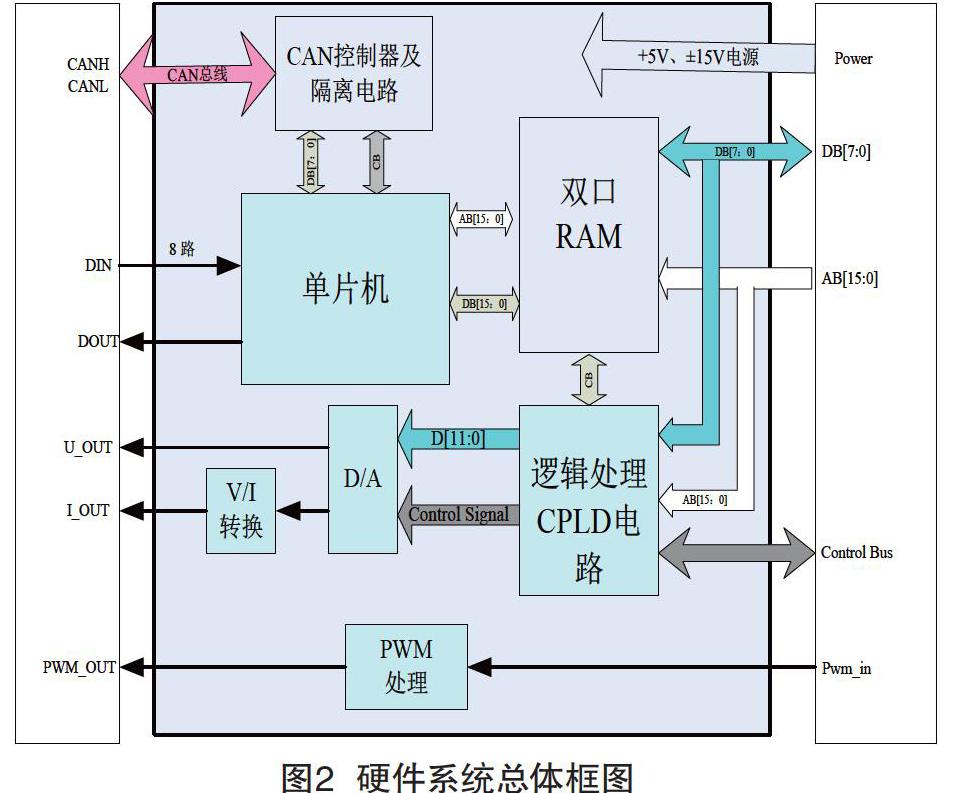
根據模塊的功能設計,對硬件電路做規劃,主要包括:電源電路、CAN控制器及隔離電路、單片機控制電路、雙口RAM電路、邏輯處理電路、D/A轉換電路和 PWM處理電路。硬件總體框圖如圖3所示。
3? 硬件設計與實現
3.1 CAN總線接口
(1)CAN總線簡介。
CAN(Control Area Network)是控制局域網的簡稱,CAN是一種有效支持分布式控制或實時控制的穿行通信網絡,最初由德國Bosch公司80年代用于汽車內部測試盒控制儀器之間的數據通信。目前CAN總線規范已被國際標準化組織ISO制定為國際標準ISO11898,并得到Motorola,Intel,Philips等大型半導體器件生產廠家的支持,在工業過程控制領域,CAN得到了廣泛的應用。
CAN網絡上的節點不分主從,任一節點均可在任意時刻主動向網絡上其他節點發送信息,通信方式靈活,可以方便的組成多機備份系統。
CAN只需要通過報文濾波即可實現點對點、一點對多點及全局廣播等方式傳送收發數據,最遠傳輸距離可達10km。CAN上的節點主要決定與總線驅動電路,目前可達110個,報文標識符可達2032中(CAN2.0A),而擴展標準(CAN2.0B)的報文標識符基本不受限制。
(2)CAN接口實現。
CAN總線接口電路主要包括:單片機、控制器、總線收發器、看門口電路、光耦隔離電路和安全防護電路等。采用Philips公司的SJA1000控制器與其配套的總線收發器82C250,考慮到SJA1000支持CAN2.0A/B規約,按照CAN總線物理層協議選擇總線介質,設計布線方案,連接成CAN網絡。
硬件電路的設計主要是CAN控制器與微機之間和CAN總線收發器與物理總線之間的接口電路設計,CAN控制器是接口電路的核心,主要完成CAN通信協議,而CAN總線收發器的主要作用是增大通信距離,提高系統的抗干擾能力,保護總線,降低射頻干擾等。電源監視電路主要實現電路的監控和復位作用,防護電路主要是用TVS二極管保護外部靜電破壞接口芯片。接口電路框圖如圖3所示。
柴油機控制器ECU采集柴油機內部的各項參數指標,如各種燃油壓力、滑油壓力、水溫等柴油機參數,根據CAN傳輸協議將數據送到柴油機通信模塊上的雙口RAM中,微機系統再從雙口RAM中取出這些參數,結合控制規范對柴油機及整個機車系統做出相應的切除和保護。
3.2? IO采集
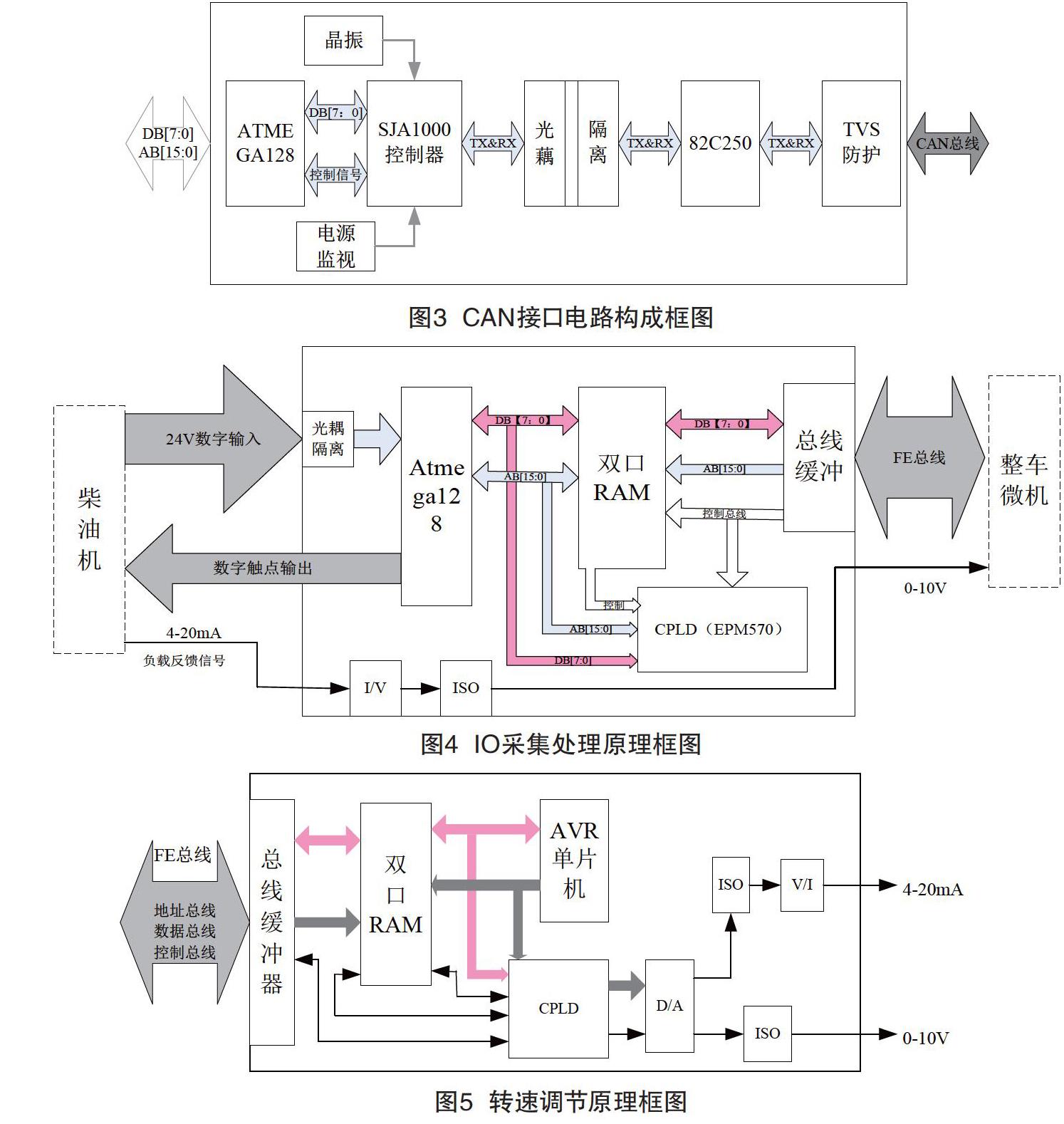
IO采集分數字輸入開光量的采集和觸點輸出控制,數字輸入開關量的采集部分負責采集柴油機或者機車其他部分送入的24V開關量,采集處理為邏輯高電平‘1和邏輯低電平‘0,再將邏輯信號送入微機參與整車控制。
觸點輸出是微機送入邏輯電平信號‘0或者‘1去驅動控制外部的器件。
3.3 柴油機轉速調節
柴油機的轉速是由柴油機控制器ECU來調節的,通過接收4~20mA的電流信號來調節不同的轉速,而柴油機的轉速與其輸出的功率是有相對應的關系,機車整車控制中,司機的手柄檔位是與柴油機的轉速對應的。 因此,不同的司機手柄位對應這不同的轉速,同時對應不對的輸出功率,如何根據司機的手柄信號來輸出柴油機調速電流信號,是通信模塊要解決的問題。
微機檢測來自司控器的檔位編碼信號,將檔位編碼信號轉換為對應的柴油機轉速給定信號,通過4~20mA電流信號控制柴油機轉速,最終由柴油機控制器實現柴油機的調速,具體結構原理如圖5所示。
微機CPU檢測不同的手柄信號位給出對應的柴油機轉速信號,通過并行總線將數據送入通信模塊,經過總線反沖器后,轉速信號存放在雙口RAM中,單片機根據雙口RAM中的轉速信號輸出對應的數字信號送給CPLD ,經過CPLD的邏輯時序匹配后送入D/A轉換成模擬電壓信號,其中一路隔離后V/I轉換成對應的4~20mA信號來調速,另外3路用作其他模擬輸出控制或預留。
3.4 PWM驅動
Pwm_in信號由外部微機CPU產生,經邏輯器件整形后,送給光耦隔離,隔離后送給MOSFET驅動芯片驅動輸出,如圖6所示。
4? 模塊功能測試驗證
柴油機通信模塊安裝在微機控制箱內,利用微機及測試系統和微機測試軟件對模塊做功能驗證,驗證內容如下。
(1)CAN功能驗證。
將2路CAN總線接口之間構成閉環連接,測試CAN總線的收發功能,若模塊上CAN接口有數據交換,對應指示燈就會閃爍,證明功能正常。
(2)數字輸入和觸點輸出。
將測試系統的數字輸出與模塊的數字輸入的各個通道互聯,利用PC機測試軟件驅動測試臺數字輸出,檢測模塊的反饋情況。
(3)PWM輸出。
由微機測試系統發出PWM波信號(占空比可調),測試模塊的PWM輸出情況,調節占空比,觀察PWM輸出的變化。
(4)模擬輸出。
通過PC機給定額定U_OUT和I_OUT的值,然后將模塊的實際輸出值接入到微機進行檢測,構成閉環,驗證給定值與實際值是否一致。
具體驗證測試方案接口如圖7所示。
5? 結語
本文的柴油機通信模塊是基于內燃機車整車控制系統設計的,兼顧了功能性和可靠性設計,同時在接口方面做了一定的擴展,為以后的應用做了預留。該模塊通過了功能調試,符合設計要求,能夠實現微機與ECU之間的數據通信交換,能準確及時地采集輸入信號和輸出控制信號,能夠實現柴油機轉速的調節,已在多個具體項目中實施應用,具有良好的可靠性。
參考文獻
[1] 單政華,張筠,馮靜,等.新型電控柴油機標定系統通信模塊的設計[J].車用發動機,2002(2):1-4.
[2] 鄔寬明.CAN總線原理和應用系統設計[M].第1版.北京:北京航空航天大學出版社,1996.
[3] 黃鶴,張平.基于CAN總線的智能柴油機轉速傳感器的研究[J].鐵道機車車輛,2003(S1):179-180,194.
[4] 譚文春,張金龍,唐航波,等.基于MC68376的高壓共軌柴油機電控單元的設計[J].內燃機工程,2005(1):11-15.