跟蹤吸塵器設計
2019-11-30 09:08:09潘胤卓
絲路視野 2019年18期
潘胤卓

摘 要:目前環衛工人清潔小區衛生,主要采用手推垃圾車,配合相應的清掃工具作業。操作者需邊推車邊打掃,作業效率低,勞動強度大。如實現垃圾車跟隨作業者工作,并具有吸垃圾的功能,可提高環衛工人工作效率。為了提高環衛工人的工作效率,本人設計了具有跟蹤功能的吸塵器,可實現清潔車邊吸垃圾邊跟隨操作者的功能。本文分別從機械結構設計、控制系統設計和動力系統設計三方面闡述該設備的設計原理和方法。
關鍵詞:吸塵器 UWB定位 跟蹤
一、引言
目前主流的跟隨技術有兩種,分別是視覺跟隨技術和UWB跟隨技術。視覺跟蹤技術采用CCD攝像頭傳感器,主要依靠圖像特征進行定位,具有價格高、處理復雜、成本高等特點,在光線不足和視線受阻的情況下無法工作,不適應夜晚和人流密集的環境。UWB跟蹤技術采用無線脈沖波定位,具有定位準確度高,成本低,不受光線和視線遮擋的影響等特點。由于環衛工人作業環境人流密集,時而夜晚作業,跟蹤吸塵器采用UWB定位技術,可降低環境的影響,實現實時跟隨的作業效果。
二、機械結構設計
(一)跟蹤吸塵器整體結構
跟蹤吸塵器整體結構如圖1所示,由吸塵裝置、行走裝置和架體組成。
圖1 跟蹤吸塵器結構圖
(二)吸塵裝置設計
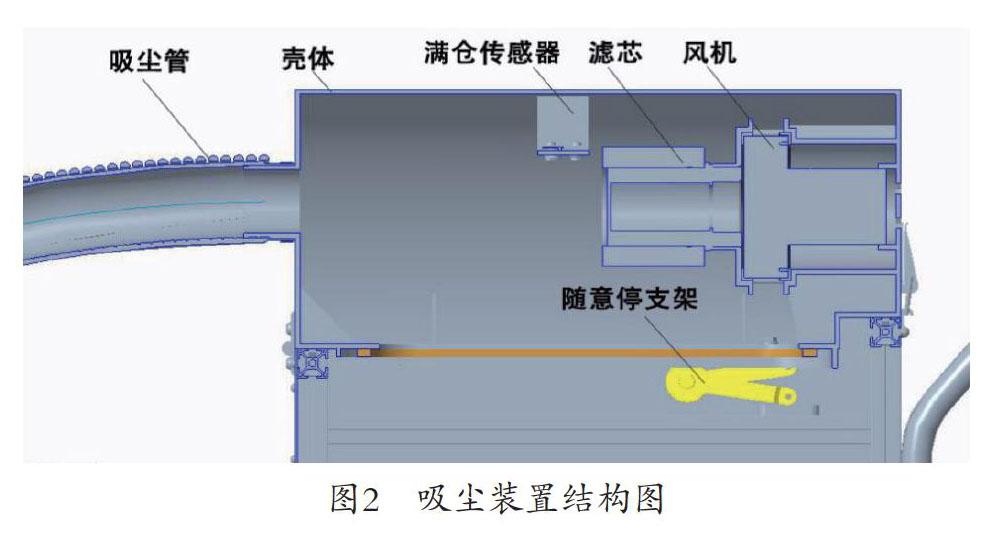
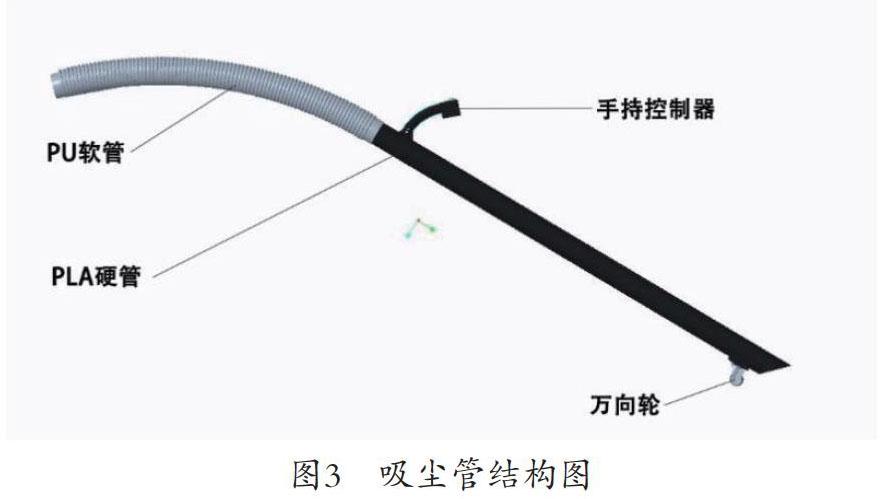
吸塵裝置由殼體、風機、濾芯、隨意停支桿、吸塵管和滿倉傳感器組成,如圖2所示。風機在殼體內產生負壓,垃圾雜物由吸塵管進入殼體。滿倉傳感器通過檢測垃圾的高度判斷垃圾桶是否滿倉。隨意停支桿可支撐殼體抬起,便于操作者更換垃圾箱。吸塵管由PU軟管、PLA硬管、手持控制器、萬向輪組成,如圖3所示,具有操作簡單靈活的特點。
圖2 吸塵裝置結構圖
圖3 吸塵管結構圖
(三)行走裝置結構
行走裝置由兩個驅動輪和兩個萬向輪組成,驅動輪由電機、聯軸器、支撐架、電磁離合器和輪胎組成。電磁離合器可連接或斷開電機的動力輸入,切換跟隨模式和手動模式。工作時,當遇到復雜路況時,切換到手動模式,清潔車由操作者推動,應對不同的工作環境。
三、控制系統設計
(一)UWB跟隨技術原理
該設備采用的UWB跟隨系統,一共三個UWB模塊,被跟隨者手持一個模塊(標簽0),另外兩個模塊需要安裝在跟蹤式吸塵器的兩側(基站1和基站2)。此UWB模塊供電使用的是5v電源,當移動模塊開關打開后,就會發射出無線信號,安裝在跟蹤式吸塵器上的兩個UWB基站接收到信號后,通過測量跟蹤式吸塵器上兩個模塊(基站1和基站2)與手持模塊(標簽0)之間的距離,根據余弦定理,可以得出標簽0相對于基站1、基站2的相對角度,并得到清潔車中點到手持模塊的距離,從而實現跟隨功能。系統最大跟隨距離為50m,并具有較強的抗干擾能力。在清潔車基站的安裝過程中,兩個UWB基站盡量遠一點,這樣測距產生的誤差對于角度的誤差會相對較小。
圖4 UWB跟隨技術原理圖①? 圖5 UWB跟隨技術原理圖②
如圖4所示,X為基站1到基站2的距離,Y、Z分別為基站1、基站2到標簽0的距離。程序會完成標簽0與基站1和基站2之間距離測量,三角形的三個邊確定后,則通過余弦定理即可算出G的角度。
對于跟蹤式吸塵器來說,只需要知道一個距離和產生的角度即可,當跟蹤式吸塵器與標簽0之間的距離大于所設定距離時,就會啟動跟蹤,當跟蹤式吸塵器與標簽0之間的距離小于設定距離時,清潔車則停止不動。如圖5所示,當位置關系滿足A情況,清潔車需要右轉,滿足B情況則直行,而C情況則左轉。
(二)控制系統設計
該設備控制器選用STM32F103C8T6單片機,是一款嵌入式32位的微控制器。它的工作溫度在-40℃~85℃之間,工作電壓2V~3.6V。其MCU具有高性能、實時性好、數字信號處理能力強、低功耗等特點,同時保持高集成度和開發簡易的特點。并且具有易于集成,體積小等優勢。
(三)DWM1000模塊
定位模塊采用的是DW1000無線收發芯片,支持同步數據傳輸和精準定位,它的最遠傳輸距離可以達到450m。芯片所耗功率也是非常的低。最小誤差可以控制在10cm之內,可實現定位和雙向測距,其效果顯著。該模塊由模式變換器、收發器,SPI接口,電路以及狀態控制器組成。通過控制寄存器來實現切換不同的工作狀態。抗干擾能力強,且適合復雜環境的定位應用。所采用的是主控制芯片接口與SPI總線。最高速率可達到20MHZ。
系統以STM32F103C8為主設備,DWM1000模塊為從設備。SI、CS、SCLK、SO引腳為DWM1000模塊核心控制引腳。
四、動力系統設計
該設備的動力系統由行走動力和吸塵動力兩部分組成。相比較于鉛酸蓄電池,鋰電池具有能量密度高、質量輕、環保、充電次數多的優點。考慮到該設備在特殊路況需要操作者推動的特點,需要選用質量輕高能量密度的電池。該設備選用24V的磷酸鐵鋰電池,容量為102AH,最大放電電流為140A,在額定電流下可工作2小時。
兩臺行走電機分別裝于兩個驅動輪,由電機驅動器控制電機的啟動、停止、反轉和調速,從而控制設備的前進、后退和轉向。
吸塵風機的工作電壓為AC220V,功率1.1KW。由于電機啟動電流是額定電流3倍以上,選用24V,5000W的逆變器,將直流24V轉化為交流220V,為吸塵風機提供動力。
五、小結
本文設計了一種具有跟蹤功能的吸塵器,采用了基于UWB技術的定位跟蹤系統,該系統運用TDOA算法,具有精度高、成本低、工程易實現的特點。該設備可提高環衛工人的作業效率,保障群眾生活環境清潔衛生。
參考文獻
[1]張豐,李順霖,陳仁,謝印忠.基于跟蹤系統的智能行李箱[J].智能計算機與應用,2019,9(3):156—158.
[2]周馳東.磁導航自動導向小車(AGV)關鍵技術與應用研究[D].南京航空航天大學,2012.
[3]李世光.基于STM32的超市智能跟隨購物機器人設計[C].中國自動化學會、濟南市人民政府.2017中國自動化大會(CAC2017)暨國際智能制造創新大會(CIMIC2017)論文集.中國自動化學會、濟南市人民政府:中國自動化學會,2017:319—323.
[4]景建斌,張云龍.基于DW1000的跟蹤購物車系統[J].中國科技信息,2019(07):90—91,93.