變電站巡檢系統
2019-12-02 08:56:52尚春虎田立國高豪釩任星俠楊國春趙帆
科技創新與應用 2019年32期
尚春虎 田立國 高豪釩 任星俠 楊國春 趙帆
摘? 要:變電站智能巡檢機器人系統用于替代人工進行變電站巡檢,能夠實現變電站強電磁環境下的全自主,全方位和全天候巡檢,將巡檢人員從危險、惡劣的作業環境和繁重的作業任務中解放出來,智能讀表、圖像識別等核心技術為一體,對輸變電站設備進行全天候巡檢、數據采集、視頻監控、溫濕度檢測等提高輸變電站內設備的安全運行程度,開創了一種全新的變電站巡檢作業模式。
關鍵詞:QT;數據監測;遠程監控;磁循跡
中圖分類號:TM63 文獻標志碼:A 文章編號:2095-2945(2019)32-0034-02
Abstract: The intelligent inspection robot system of substation is used to replace manual inspection of substation, which can realize fully autonomous, omni-directional and round-the-clock inspection in strong electromagnetic environment of substation. The inspection personnel will be liberated from the dangerous, harsh working environment and heavy tasks, and the core technologies such as intelligent meter reading and image recognition will be integrated. The safe operation degree of the equipment in the transmission substation is improved by carrying out round-the-clock inspection, data acquisition, video surveillance and temperature and humidity detection of the transmission substation equipment, and a new substation patrol operation mode is created.
Keywords: QT; data monitoring; remote monitoring; magnetic tracking
1 概述
隨著社會經濟的發展,居民區變電站的數量不斷增多,其地理位置越來越分散,這給周期性巡視帶來了一定的困難。不僅農網中居民區變電站的維護存在很多問題,而且城市土地的緊張、居民區現代化高層建筑大量涌現,導致越來越多的居民區變電站建在潮濕的地下,運行環境的優劣直接影響到電氣設備的正常運行。
本系統針對室外變電站運行監測研究的實際需求,研制基于機器人的自主巡檢監測平臺,設備包括:自動巡航模塊、圖像信息采集模塊、圖像處理模塊、無線通信、智能預處理報警模塊等主要部分,實現“智能、自動、實時”為管控目標,通過搭建監控平臺,構建“現場-監控平臺-報警”多層聯動的自巡檢測報警一體化工作模式,全面提升變電站設備狀態檢測效率以及安防水平,確保設備的正常運行以及變電站的安全運行。
2 系統總體設計
該變電站巡檢系統主要由監控控制系統、數據采集系統和數據儲存系統構成。
2.1 監控控制系統的設計
巡檢控制界面依托于海康威視的螢石云視頻平臺,使用螢石云提供的SDK源碼進行二次開發,集成到軟件中,此實時視頻監控是整個項目中的實現的難點所在之處,在此之前使用了多種方法進行實現,遇到的最大問題就是視頻延遲較高,最終使用SDK源碼進行編寫后,視頻延遲的問題降低了5倍,在4G網絡良好的情況下視頻延遲在1秒以內,可以達到對巡檢機器人的實時監控要求。
此外,可以對多個視頻進行操作,視頻清晰度可切換。也達到了監控平臺的集中管控的目的。
2.2 數據采集系統的設計
數據采集系統主要用于傳感器將采集到的參數進行匯總處理,然后通過移動網、WiFi等通信方式將數據上傳到電腦端進行數據的分析處理。
2.3 數據儲存系統的設計
利用阿里云的數據庫來儲存具體數據的信息。數據庫可云端自動備份,減少因數據庫丟失而帶來的不必要的損失。
3 系統硬件設計
3.1 控制模塊
體感交互運動系統的控制器模塊選擇嵌入式ST公司的32位ARM處理器STM32F103ZET6,該微處理器具有較高的工作頻率,豐富的I/O外設接口,支持多種通信接口,自帶AD轉換功能,滿足了本系統的性能需求。
3.2 傳感器模塊
通過電壓、電流、火焰、溫濕度等模塊采集變電站的一些重要數據傳給上位機進行監測。
3.3 無線通信主控
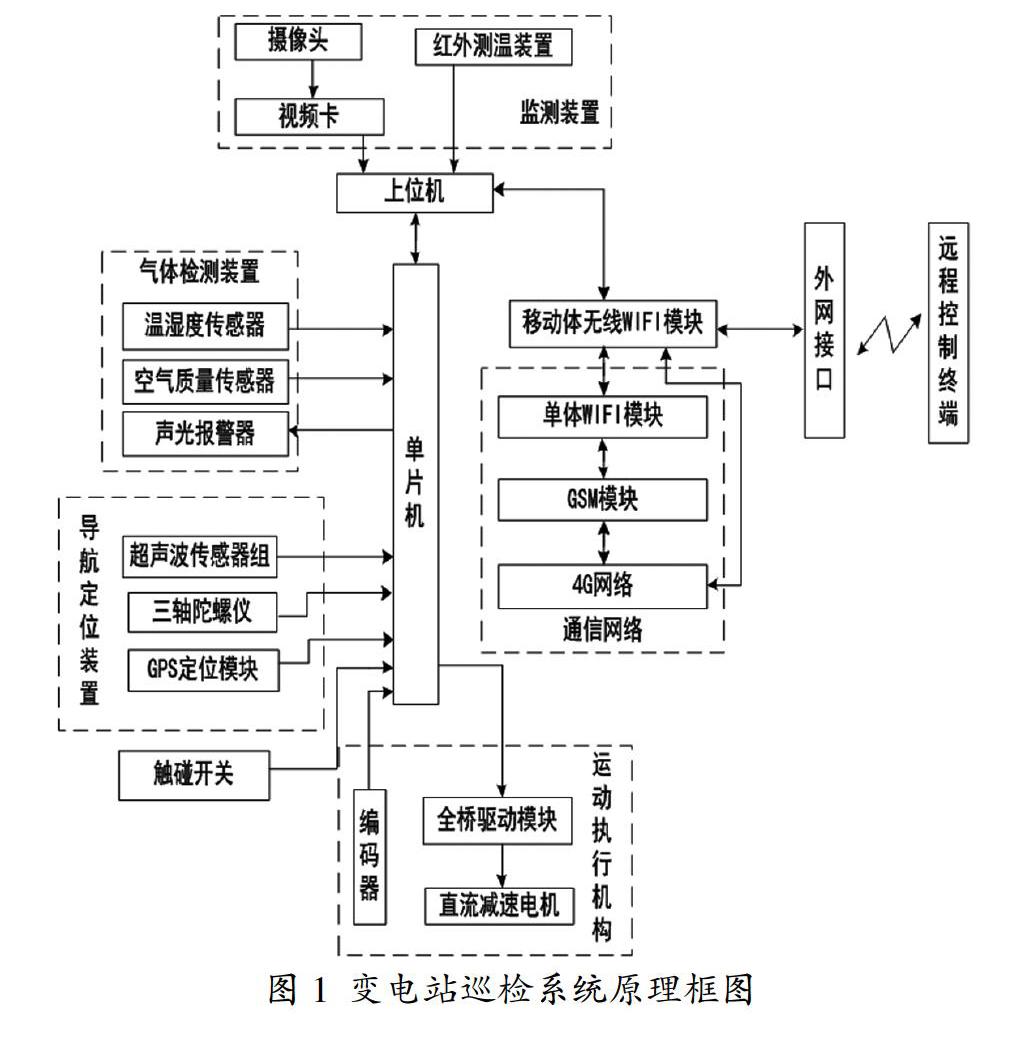
通信主控采用的ESP8266模組,利用MQTT協議將模塊與巡檢機器人與PC進行組網原理框圖如圖1所示。
4 系統軟件設計
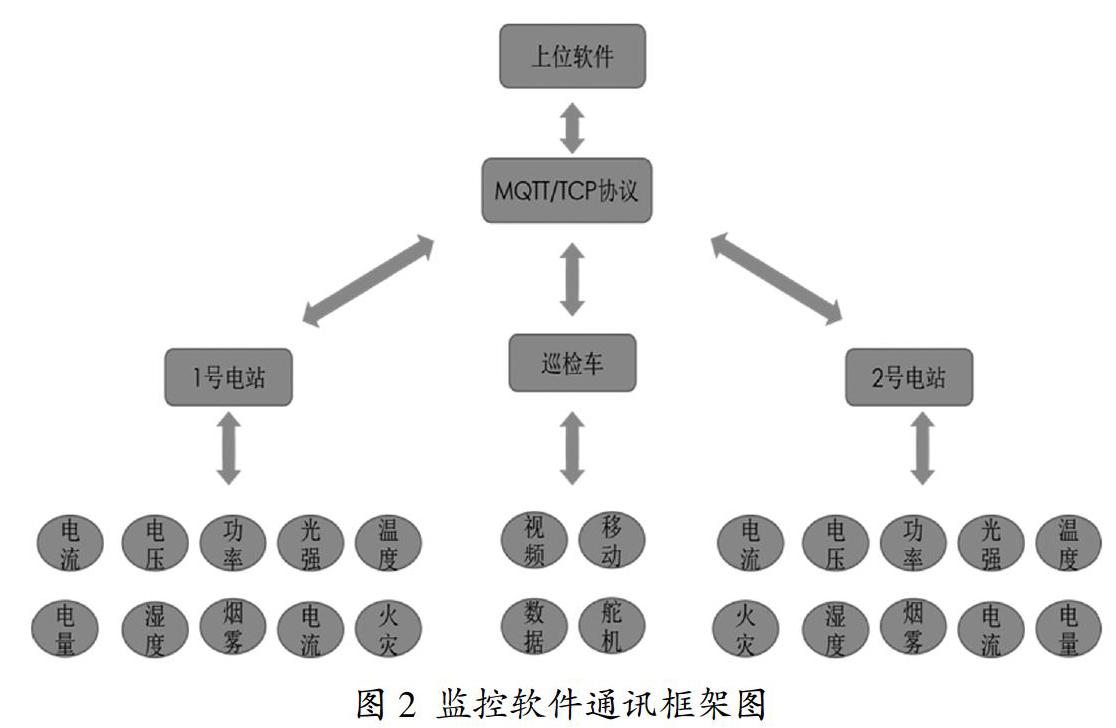
整個系統的通訊框架以TCP/IP與MQTT協議為基礎。
MQTT協議(消息隊列遙測傳輸)是基于TCP/IP協議棧而構建的,因為MQTT是一種輕量級的、靈活的網絡協議,所以它已經成為IoT通信的標準。我們使用中國移動Onenet云平臺作為協議的Broker,而我們的電站監測裝置、遙控、巡檢機器人等作為信息發布者,經過不同的訂閱進行數據分級與交換,QT上位機的訂閱權限則為最高級,可以監控下位所有信息,收到數據后會將數據進行處理顯示,以更加直觀的方式呈現到用戶面前。如圖2所示。
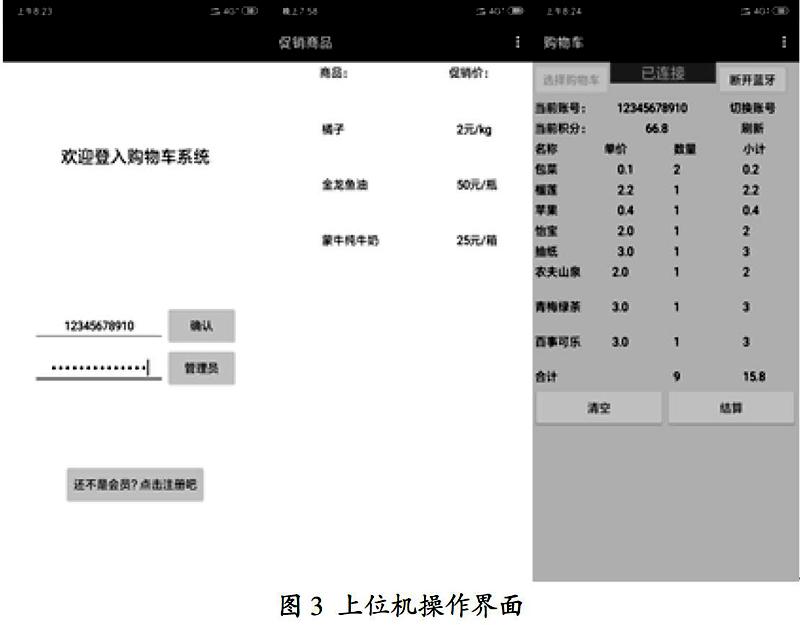
考慮到常用組態軟件在網絡通信以及實時性等方面的局限性,該監控系統采用可視化集成開發工具QT5進行開發。
利用基于C++編程語言的QT框架編寫上位監控軟件,采用DSC分布式控制集中管理的系統結構,軟件主要完成對整個系統的集中管控、監控、數據采集、視頻巡查、數據存儲等功能。以用螢石云、阿里云、Onenet三大云平臺進行整合集中,融合了云視頻監控功能,可進行遠程監控,使用MQTT遙信消息隊列傳輸協議作為整個系統的核心通訊協議,并使用阿里云數據自動儲存、備份數據,極大的增加了數據的可靠性。界面如圖3所示。
5 結束語
本文提出一種智能變電站巡檢系統,綜合運用上位機、物聯網、嵌入式、傳感器等技術,巡檢機器人可代替或輔助人工完成變電站設備的巡檢作業。通過各傳感器模塊采集的數據以及巡檢機器人的實時監控,將數據傳送到上位機軟件進行數據的儲存和查詢以及對數據的可視化操作和周圍環境監控。當出現異常數據時會及時的發出報警,實現了巡檢機器人在對變電站巡檢過程中的實時監測。
參考文獻:
[1]楊旭東,黃玉柱,李繼剛,等.變電站巡檢機器人研究現狀綜述[J].山東電力技術,2015,2(1):30-34.
[2]惠曉東.智能變電站設計配置化技術分析[J].科學技術創新,2017(34):47-48.
[3]梁永強.智能巡檢機器人應用現狀及問題探析[J].山東電力技術,2018(2):31-34.
[4]楊森,董吉文,魯守銀.變電站設備巡檢機器人視覺導航方法[J].電網技術,2009,33(05):11-16.
[5]孫國凱,韓剛,等.變電站巡檢方式對比及智能巡檢機器人[J].農村電氣化,2008,04(24):30-33.
[6]王東輝,張玉亮,宋彥軍.變電站智能巡檢機器人的應用研究[J].電工技術:理論與實踐,2015(6):128-129.