火箭橇時空位置測試數據處理算法分析
2019-12-03 02:07:28王林安朱軼龍
兵器裝備工程學報 2019年11期
關鍵詞:數據處理
王林安,付 宇,朱軼龍
(中國兵器工業試驗測試研究院,陜西 華陰 714200)
伴隨著世界新軍事變革的不斷發展與高新技術的廣泛應用,現代戰爭的作戰形態和作戰理念正在發生深刻的變化,基于效果作戰的戰爭效益觀逐漸被世界各國所接受。精確制導武器以其快速、敏捷、高效、具有遠程精確打擊、命中精度高等特點,使其具有強有力的殺傷能力,是當今信息化高技術戰爭必不可少的主要武器。精確制導武器的關鍵技術在于制導系統,制導系統的精度決定著武器系統是否能夠準確地擊中目標。而衛星導航、慣性測量技術則成為提高中遠程精確制導武器制導可靠性和實戰能力最有效的導航模式。
在改進提高制導裝置自身精度的同時,提供更為接近真實使用環境的試驗測試條件,研究制導系統的天地一致性問題,最終提高使用精度,就成為一個重要的研究課題[1-2]。對制導系統進行客觀有效的性能鑒定和評估考核,是降低制導武器定位誤差、提高導航精度的基礎,是提高精確制導武器制導可靠性和實戰能力的必要環節。由于火箭橇試驗技術在制導系統性能考核中具有不可替代的獨特優勢,近些年來,相關試驗測試技術在國內進行了較為深入的研究和探索,其成果也得到了較好的應用。
1 制導系統性能考核的主要方法
目前,國內針對衛星、慣導等制導系統性能考核測試的主要方式有以下幾種:
1)實驗室測試。衛星制導系統的實驗室測試方法主要有靜態法、模擬法、公路跑車法等[3],后兩種方法在一定程度上模擬了動態測量過程,可以對GPS、北斗制導系統接收機動態特性、軟件處理精度等進行有限的考核,不足點是由于無法模擬實際的飛行環境,因此動態精度的考核不夠充分,模型誤差較大。
慣導系統的實驗室測試方法有:重力場翻滾測試、振動臺測試和離心機測試等。重力場測試,只能提供±1g的加速度輸入,與加速度計實際工作環境有很大的出入,不能充分激勵高次項誤差系數;振動臺測試只涵蓋了加速度計真實工作環境高頻區的一個小范圍,且振動臺測試多用于環境可靠性試驗;離心機測試雖然分離加速度計誤差系數,但是測試時間遠大于加速度計實際工作時間,在提取高性能系統數據中產生的問題較多[4]。
2)飛行試驗測試。飛行試驗是考核導彈制導系統最直接有效的測試方式,通過雷達、光電、遙測等多種外測設備,對彈道數據進行測量和統計分析,以獲取制導系統的性能參數。但是其存在試驗成本高、安全風險大、實驗數據樣本有限等缺點,尤其在武器裝備科研階段,飛行試驗不是最經濟、最安全的系統考核方式。
3)火箭橇試驗測試。火箭橇試驗是介于實驗室測試和飛行試驗之間的一種“地面飛行試驗”,可以使慣性測量裝置受到高達約8個g的加速度和15個g的振動[5]。相對于實驗室測試,其最大特點是:火箭橇所提供的力學環境更接近于真實環境,能夠模擬產品所需要的速度,氣流場、溫度場更接近于自由場實際環境,且可以進行大尺寸產品1∶1試驗,也便于各種測試儀器的布設。相較于飛行試驗,能完全無損地回收到被試產品,供進一步測量分析,減小武器試驗風險,同時具有較高的重復收集試驗數據的能力,且測試數據獲取相對容易,能夠縮短產品研制的周期。
火箭橇試驗技術就是在火箭發動機推力的作用下,試驗裝置能夠在高精度軌道上高速滑行,以實現對被試產品進行動態性能考核的地面模擬試驗技術。該技術目前已廣泛應用于航空、航天、兵器以及高科技領域的科學試驗,如精確制導、空氣動力、航空彈射救生、引信、戰斗部、穿甲、爆炸沖擊等,這種試驗技術能夠彌補實驗室測試和導彈飛行測試的空白[6]。美軍大力神、宇宙神和民兵等洲際導彈的成功研制,在某種程度上要歸功于非常成功的火箭橇試驗,因此美國把火箭橇試驗正式列入制導定位的試驗大綱中,作為地面試驗的最后階段,并明確規定制導系統只有在火箭橇試驗考核通過后才能進行飛行試驗[7]。
依托火箭橇試驗測試技術,利用獲取的火箭橇運行過程時間-空間位置測試數據,解決慣性器件、衛星導航系統在高速度、高加速度等動態條件下導航定位性能的考核驗證問題,在國內外目前是最佳的試驗測試方案。兵器靶場在此項技術上通過長期的科研攻關,已經取得了明顯的突破,并獲取了大量有效的試驗數據。
2 基于光電阻隔技術的火箭橇時空位置測試原理
針對火箭橇時空位置的測試,國內目前主要采用了磁電感應、光電阻斷兩種技術。磁電感應方法是利用火箭橇攜帶永磁鋼,經過軌道上布設的若干霍爾開關傳感器,產生計時脈沖信號,形成火箭橇運行全程的彈道基礎數據[8-9]。這種測試方法存在的主要問題是:在幾公里的范圍內,傳感器和數據采集系統需要布設數千路設備,系統復雜龐大,成本高,同時,系統動態響應延時誤差較大,測試精度有限。采用光電阻隔技術進行火箭橇時空位置的測試方法,則有效解決了上述問題,得到了較好的應用[10]。
基于光電阻隔技術的火箭橇時空位置測試原理示意圖如圖1。首先需要在火箭橇軌道全程,建立米級間距的位置標,位置標采用圓柱型結構,位置標頂端設計為球窩型結構,用于安置精密測量靶球。
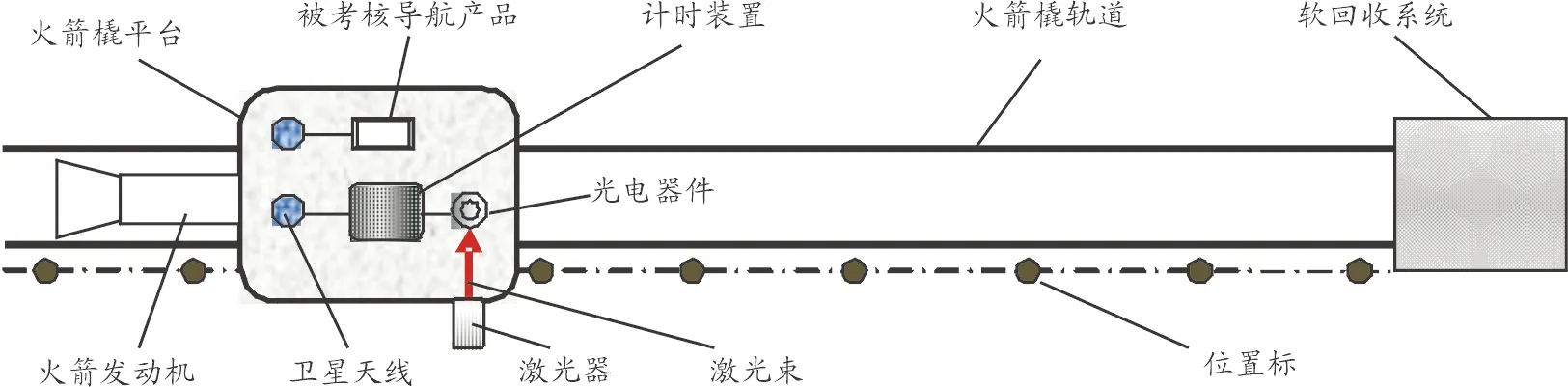
圖1 基于光電阻隔技術的火箭橇時空位置測試原理示意圖
位置標沿軌道方向的距離,采用高精度的電子全站儀和激光跟蹤儀聯合進行測量,全站儀的測量數據用于對激光跟蹤儀的測量數據進行分段閉合平差,以提高位置標距離測量精度。
火箭橇平臺上安裝有光電阻隔探測的光電組件和計時設備,計時設備具有接收衛星UTC時間功能。火箭橇在軌運行過程中,當光電組件經過位置標時,會由于激光光路受到阻隔而產生計時脈沖信號,觸發計時設備,記錄火箭橇通過每一個位置標的精確時間信息,結合已經測量得到的位置標距離信息,就可以對火箭橇全程的運行軌跡進行精確處理[11]。
3 時空位置數據處理方法
由于火箭橇軌道位置標布設方式所限制,位置標的間距僅能達到米級,針對高精度的導航衛星差分系統和慣導的性能考核,位移的分辨率遠遠不足,需要利用火箭橇通過每個位置標處的位置和時間信息,通過數據處理,解算出火箭橇通過相鄰兩個位置標之間的運動方程參數,可以得到任意時刻火箭橇的運行位置,利用時間量的統一,才能提供精確有效的制導系統比對數據。由于火箭橇在高速運行過程中,火箭發動機推力和橇體所受氣動阻力、摩擦阻力不斷變化,給彈道運動方程參數的解算帶來了較大的難度,需要對其數據處理方法重點進行研究,這也是研究解決火箭橇時空位置測試的關鍵技術之一。
火箭橇軌道在一定距離內近似為空間直線,因此,本文介紹的幾種時空位置數據處理算法均是基于直線運動方程。
設:從發射點開始,軌道位置標依次標記:W1、W2、W3、…、Wn-1、Wn、Wn+1、…;對應位置標之間的間距:S1、S2、S3、…、Sn-1、Sn、Sn+1、…;火箭橇通過相鄰兩個位置標的運行時間間隔:T1、T2、T3、…、Tn-1、Tn、Tn+1、…。位置標間距Sn和火箭橇通過位置標之間的時間間隔Tn,是經過精確測量得到的已知量。
以下介紹3種計算方法,對火箭橇在兩相鄰位置標之間的運動方程參數進行解算。
算法1:平均速度法
平均速度法是火箭橇運行彈道特征點速度測量中常用的一種簡易計算方法。

(1)
則加速度(an)為
(2)
則位置標處的速度(Vn)為
(3)
算法2:三段加加速度迭代法
考慮火箭發動機推力和火箭橇阻力在運行過程中不斷變化,會引起加速度的變化,將加加速度納入到彈道計算,是在項目研究之初提出的一種數據處理方法。
該方法是假設火箭橇在相鄰三段位置標之間的運動為勻變加速直線運動,rn為該段的加加速度,則火箭橇通過任意相鄰段位置標Wn、Wn+1、Wn+2、Wn+3之間的運動方程可以表示為
其中:
Sn′=Sn;Sn+1′=Sn+Sn+1;Sn+2′=Sn+Sn+1+Sn+2
Tn′=Tn;Tn+1′=Tn+Tn+1;Tn+2′=Tn+Tn+1+Tn+2
采用Matlab軟件編程求解方程組,可以得到每一個位置標處的速度、加速度和加加速度值。
算法3:兩段加速度迭代法
在項目研究過程中對算法1、算法2進行比較分析之后,發現算法2計算過程復雜,相較算法1,不僅沒有提高精度,反之卻放大了測量誤差。由此,研究人員又提出一種相對簡便、精度更高的兩段加速度迭代算法。
依舊假設火箭橇在相鄰兩段位置標之間的運動為勻變速直線運動,則火箭橇通過任意相鄰段位置標Wn-1、Wn、Wn+1的運動方程可以表示為
解方程組可以得到:
(4)
利用式(4)計算的速度,可以解算得到每一段加速度:
an=(Vn+1-Vn)/Tn
(5)
再利用得到的加速度和位置標間距、時間間隔量值,采用式(6),對位置標處的速度進行段內閉合平差修正計算,以提高每一段位移方程的計算精度。
Vn=Sn/Tn-an·Tn/2
(6)
4 火箭橇位移方程
火箭橇位移方程是基于時空位置測試結果和位置標段內運動彈道參數數據共同形成的。
1)采用算法1和算法3的數據處理結果,火箭橇在相鄰兩個位置標(Wn,Wn+1)之間任意時刻的位移內插計算方法見式(7):
(7)
式中:ΔSn為內插計算點與位置標Wn之間的位移量;ΔTn為內插計算點與位置標Wn之間的運行時間。
2)采用算法2的數據處理結果,火箭橇在相鄰兩個位置標(Wn,Wn+1)之間任意時刻的位移內插計算方法見式(8):
(8)
3)以發射點為起點,則火箭橇全程任意時刻的位移方程可以用式(9)表征。
Sn=Sum(S0,…,Sn)+ΔSn
(9)
式中:S0為火箭橇發射點光電組件激光軸與第一個位置標之間的距離;Sum為數值和函數(下同)。
4)為了給被檢測設備提供精度更高的比對數據,則應該給出任意兩個特征點之間的位移量,可以消除發射點位置、特征點位置等測量系統誤差。假設計算的首點位于位置標Wn后;計算的尾點位于位置標Wm后,則火箭橇在任意兩時刻之間的位移方程可以用式(10)表征。
Smn=Sum(Sn+1,…,Sm)+(ΔSm-ΔSn)
(10)
5 幾種數據算法的比較分析
2018年10月,利用火箭橇時空位置校準系統對搭載的一套動態差分GPS導航設備進行了考核測試,針對該發試驗的時空位置測試數據,分別采用上述3種算法進行數據處理,并計算10組有效位移數據偏差的平均值和標準偏差,數據統計比較驗證情況見表1。
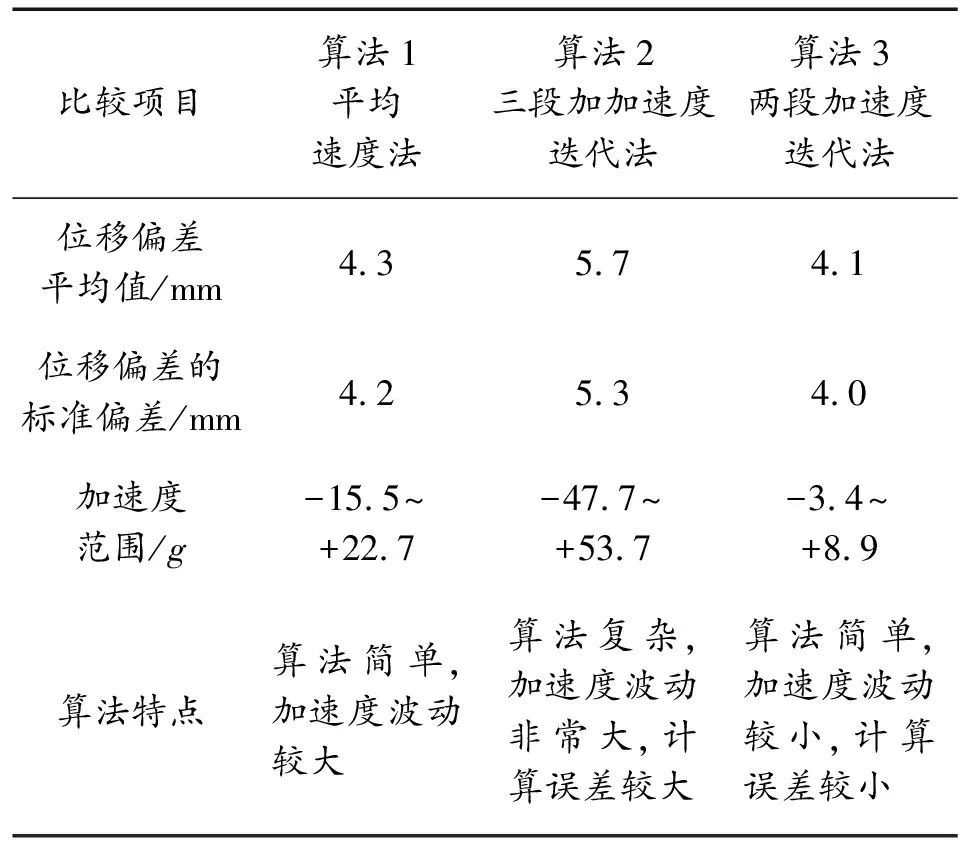
表1 某項目試驗3種數據處理算法的結果比較
從表1不同算法處理結果的對比分析可以得出:算法1加速度波動較大;算法2處理結果誤差明顯增大,加速度被放大,而且算法復雜;算法3的“兩段加速度迭代法”較前兩種算法,計算精度都有所提升,加速度波動較小。
6 動態試驗驗證結果
在上述試驗中,按照GPS的UTC整秒時間,采用“兩段加速度迭代法”處理得到火箭橇的運動方程參數,并用式(7)對火箭橇時空位置數據進行內插處理,用式(10)計算火箭橇在兩時刻之間的位移量。動態差分GPS導航設備1 s的位移量,則采用其動態差分測量得到的大地坐標值(x、y、z),用式(11)進行計算。

(11)
該動態差分GPS導航設備試驗測試比對結果見表2。
試驗結果表明:該GPS測量裝置在火箭橇運行前8 s的高加速度條件下,衛星信號接收失常,導航精度較差;9 s之后低加速度條件下的導航定位性能則優于10 mm。
采用“兩段加速度迭代法”處理得到的該項目試驗火箭橇運行速度、加速度曲線如圖2、圖3。
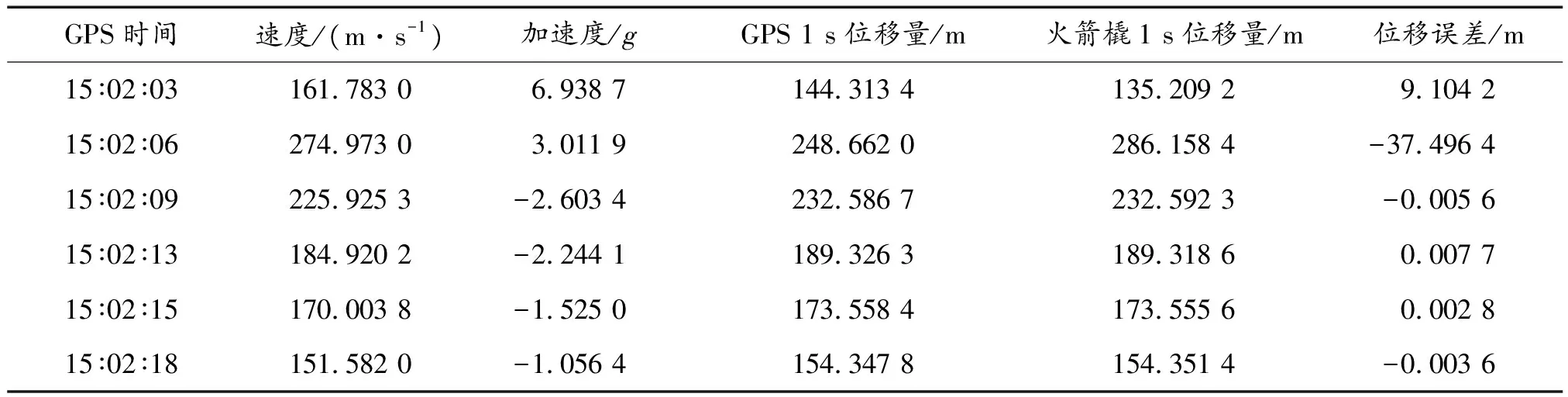
表2 某GPS產品試驗測試結果部分數據
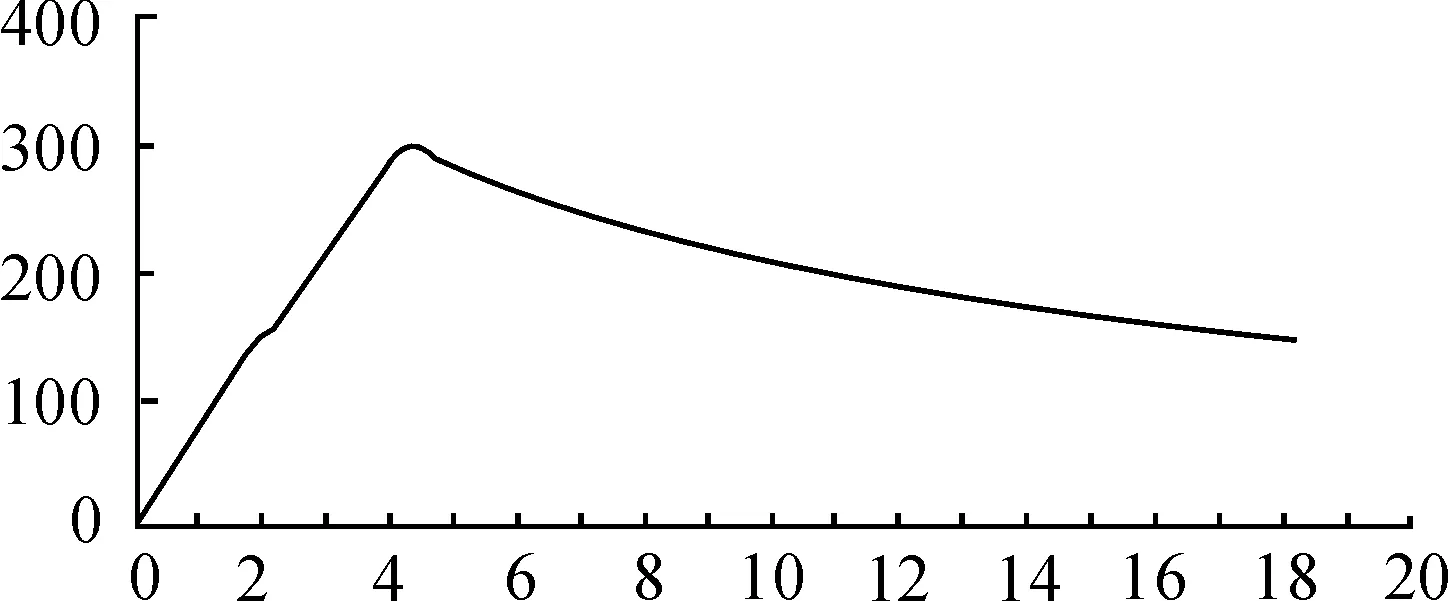
圖2 某科研項目試驗火箭橇時空位置速度曲線
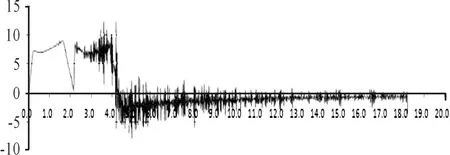
圖3 某科研項目試驗火箭橇時空位置加速度曲線
7 結論
本文對3種火箭橇時空位置測試數據的數據處理算法進行了分析比較,并通過實際的試驗測試數據驗證,采用“兩段加速度迭代法”計算時空位置彈道方程參數,算法簡單,得到的位置標之間段內位移方程參數閉合,航向加速度沒有明顯的放大趨勢,數據處理誤差滿足需求,可以作為優選的時空位置數據計算方法,有效提升了火箭橇時空位置數據處理的精度。
猜你喜歡
中學生數理化·自主招生(2022年9期)2022-05-30 10:48:04
心理學報(2022年4期)2022-04-12 07:38:02
水泵技術(2021年3期)2021-08-14 02:09:20
電子測試(2018年4期)2018-05-09 07:28:12
當代化工研究(2016年9期)2016-03-20 16:22:13
中國慣性技術學報(2015年1期)2015-12-19 13:12:17
計算機工程(2015年4期)2015-07-05 08:28:04
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:22
聯合國青年技術培訓(2014年7期)2014-04-12 00:00:00
中國質量與標準導報(2014年7期)2014-02-28 22:24:35