一種近程簡易制導火箭方案設計和仿真
2019-12-03 02:07:28張敬敏章浩飛劉佳興
兵器裝備工程學報 2019年11期
張敬敏,章浩飛,劉佳興
(1.西北工業大學 航天學院, 西安 710072; 2.中國兵器工業第二〇八研究所,北京 102202)
進入21世紀,日益惡劣復雜的戰場環境要求利用新技術、發展新武器以順利完成作戰任務、達到戰術戰役目的,尤其是現代電子技術、自動控制技術、數字信息技術和微光機電技術的迅猛發展,使得對重點目標實施精確打擊成為現實。相比精確制導彈藥,簡易末端修正彈藥結構相對簡單、成本低、技術較易實現、適合部隊大量裝備,與常規彈藥相比,能大幅減小落點散布,提高射擊精度,減少彈藥的消耗,因此成為各國彈藥發展的一個熱點[1]。
目前,實現末端制導與修正的執行機構主要有阻尼器、空氣動力鴨舵和脈沖推力器[2]。文獻[3]中提出一種利用阻尼器的縱向彈道修正自適應落點控制算法,對于靜態目標具有較好的打擊精度,但是無法進行側向的彈道修正。文獻[4]中設計一種利用鴨舵執行機構的二維彈道修正方法,具有連續提供控制力、大氣層內修正精度高的優點,但是其機構復雜、成本較高,大氣層外控制效率有限。文獻[5-8]中對利用脈沖推力器進行彈道修正的方法進行了研究,分析了影響脈沖修正能力的因素,通過仿真對點火控制方法和修正算法進行了優化,以上文獻重點在于理論方法的研究,對于制導控制裝置的系統組成、工作原理和具體實現介紹不足。本研究以單兵近程簡易修正火箭為研究對象,對制導模塊的組成、原理、控制方法等要點進行了較為詳細的研究和仿真分析,并采用易購電子元件、光學器件和執行機構建了樣機,進行了試驗驗證,取得了預期效果。
1 簡易制導模塊的組成與原理
通用制導模塊由捷聯導引頭、傳感器、信號處理電路、電源和執行機構等組成,配套裝備包括目標激光指示器、測距觀瞄火控系統等,如圖1所示。
圖1 通用制導模塊結構組成
簡易制導導引頭采用捷聯激光半主動制導方式。執行機構可采用環狀布置的微脈沖推力器結構。射手發現目標后,發射制導火箭,同時使用激光照射器照射目標,此時的激光照射器發出的激光是按一定規律向空間發射經編碼調制的激光束,且光束中心線對準目標。在彈道末段,目標漫反射的激光進入導引頭視場,導引頭的光學系統將激光聚焦在四象限光電探測器上[9],四象限光電探測器將光的偏轉信號轉成電信號,信息處理器對此電信號進行程序處理,解算裝置計算出彈體偏離中心線的大小和方向,形成控制信號,向脈沖推力器發出指令,控制恰當位置的脈沖推力器作用,修正制導火箭彈道,直至命中目標。
導引頭探測原理如圖2所示。彈丸以轉速ω(變值)旋轉飛行,通過脈沖推力器實施末段彈道修正。XYZ為固定的基準彈道坐標系,X表示彈道射程,Y表示彈道高低,Z表示彈道方向。目標漫反射激光進入導引頭視場后,導引頭的光學系統將激光聚焦在光電探測器上,光電探測器輸出對應位置的電壓電流信號,導引頭的光電信息處理電路會對接收到的電流電壓信號進行處理,向制導模塊的信號處理器發送兩個值δ和α,δ是導引頭光軸相對于彈與目標連線的夾角,α是彈軸旋轉坐標系中彈丸與目標連線在彈橫斷面投影線與Y軸線夾角。
圖2 導引頭探測原理簡圖
信息處理器根據重力傳感器確定的地球重力方向和δ、α角,可以計算出彈丸在垂直方向偏離彈道的數值和其在水平方向偏離彈道的數值。信號處理器預裝訂的制導控制算法據此可以進一步確定彈丸當前彈道是否需要修正,以及應該進行方向修正或是進行高低修正。在需要進行彈道修正時,信號處理器確定出恰當位置的脈沖推力器,向其發送點火指令,脈沖推力器噴射火藥氣體的反作用力推動彈丸改變彈道,將彈道修正至理想位置,直至命中目標,簡易激光制導原理示意圖如圖3。
圖3 簡易激光制導原理示意圖
2 簡易控制系統
2.1 脈沖推力器配置方案
近程簡易修正火箭配置有一組推力器,每組共有12個微型脈沖推力器呈環狀排布,由這些推力器來提供修正火箭彈道偏差所需的控制力和力矩,在實際的工作過程中,這些微型脈沖推力器按照時序分步進行點火,從而使得單兵火箭的工作時間加長、控制精度提高、落點散布減小[10]。各微型脈沖推力器和修正火箭質心之間的距離為li,所有微型脈沖推力器在火箭彈體上的位置都是固定不變的,所有脈沖推力器同時工作時提供的合力為Fp,與準彈體坐標系下oz4軸之間的夾角為σ。
2.2 控制方案設計
將脈沖力投影到準彈體坐標系(ox4y4z4)內,可以得到準彈體系下的脈沖力和繞質心的力矩表達式為
(1)
(2)
通過坐標變換,將此脈沖力投影到彈道坐標系下的結果為:
(3)
由于初始擾動的存在,修正火箭在實際飛行過程中的彈道與理論彈道是會有偏差量的。假設在飛行過程中,某個時刻t時單兵火箭質心相對地面坐標系下的位置為,在單兵火箭期望的理論彈道中該時刻的位置是(xc,yc,zc),兩者作差,可以得到地面坐標系下的偏差值為
(4)
再將求得的地面坐標系下的彈道偏差值轉換到彈體坐標系中,記轉換矩陣為A(ψ,?,γ),計算得到彈體坐標系下的偏差量為
(5)
控制系統通過彈道偏差變化信息反饋來實時獲取火箭彈的姿態信息,通過處理電路進行結算,實時在線修正彈道,即可達到精確控制的效果。
點火方案采用間隔組件同時點火的控制方案,從而使得控制系統的精度更高,當彈道的偏差值大于給定閾值時,距離彈道偏差方向最近的微型脈沖推力器同時點火,隨著彈丸的不斷旋轉,這時原本靠近偏差方向的微型脈沖推力器開始遠離偏差方向并停止工作,新的靠近偏差方向的組件開始工作。每個推力器的工作時間為τ。
脈沖力的作用時間很短,隨著彈丸的不斷旋轉,噴管組件隨彈丸轉過的角度也會增大,使得脈沖力在指定方向的合力分量將會減小,脈沖力的利用效率就會受到影響。
2.3 控制力及力矩模型
加入脈沖力的簡易修正火箭彈質心運動的動力學方程為
(6)
其中:Fx2、Fy2、Fz2為除推力外所有外力(總空氣動力R,重力G等)分別在彈道坐標系ox2y2z2各軸分量的代數和;Px2、Py2、Pz2分別為推力P在彈道坐標系ox2y2z2各軸上的分量。Fpx2、Fpy2、Fpz2分別為脈沖修正力在ox2y2z2各軸上的分量。
加入脈沖修正力矩的簡易修正火箭彈繞質心轉動的動力學方程為

(7)
其中:Mx4、My4、Mz4分別為火箭彈受到的除脈沖力矩之外的所有力矩在準彈體坐標系各坐標軸上的分量;Mpx4、Mpy4、Mpz4分別為脈沖控制力矩在準彈體坐標系各坐標軸上的分量。
3 彈道仿真分析
簡易制導模塊可以用于多種制導彈藥上,下面以近程修正火箭為基礎,分析簡易制導模塊對近程火箭命中精度的影響。通過研究分析發現,導引頭解耦和控制策略和推力器總沖是影響彈道修正能力和精度主要因素,關于導引頭解耦已有大量文獻進行詳細研究,不再贅述,本文仿真重點分析控制策略和和推力器總沖對精度的影響。首先仿真分析無控火箭初速和射角對命中精度影響。
3.1 無控火箭彈道分析
無控條件下,選取發射初速V0=160 m/s、縱向發射角θ0=9.6°、側向發射角ψv0=0°為標準條件,進行無控彈道仿真。在仿真過程中,分別加入ΔV0=±4 m/s的初速誤差、Δθ0=±1°的縱向發射角誤差和Δψv0=1°側向發射角誤差與標準情況進行比較。3種情況下的無控仿真彈道如圖4~圖6所示。
由圖4~圖6可知,在無控情況下,ΔV0=4 m/s、Δθ0=1°和Δψv0=1°時彈道落點與標準條件(V0=160 m/s、θ0=9.6°和Δψv0=0°)彈道落點之間的偏差(X方向)分別為21.6 m、39.4 m和10.55 m,表明發射初速和射角對命中精度的影響較大,為了提高命中精度,需采用簡易制導控制系統進行彈道修正。
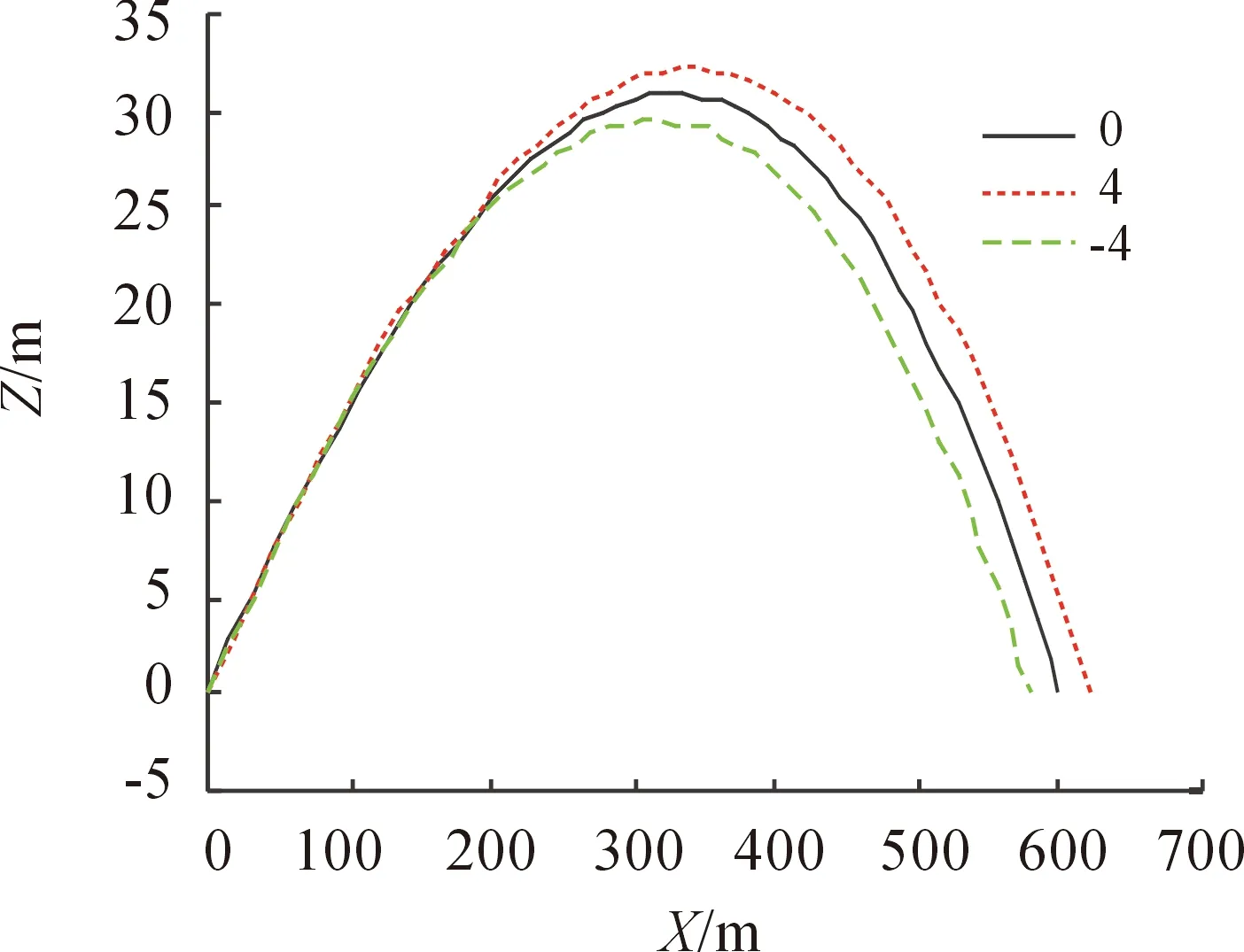
圖4 同縱向、側向發射角,不同發射初速誤差無控彈道
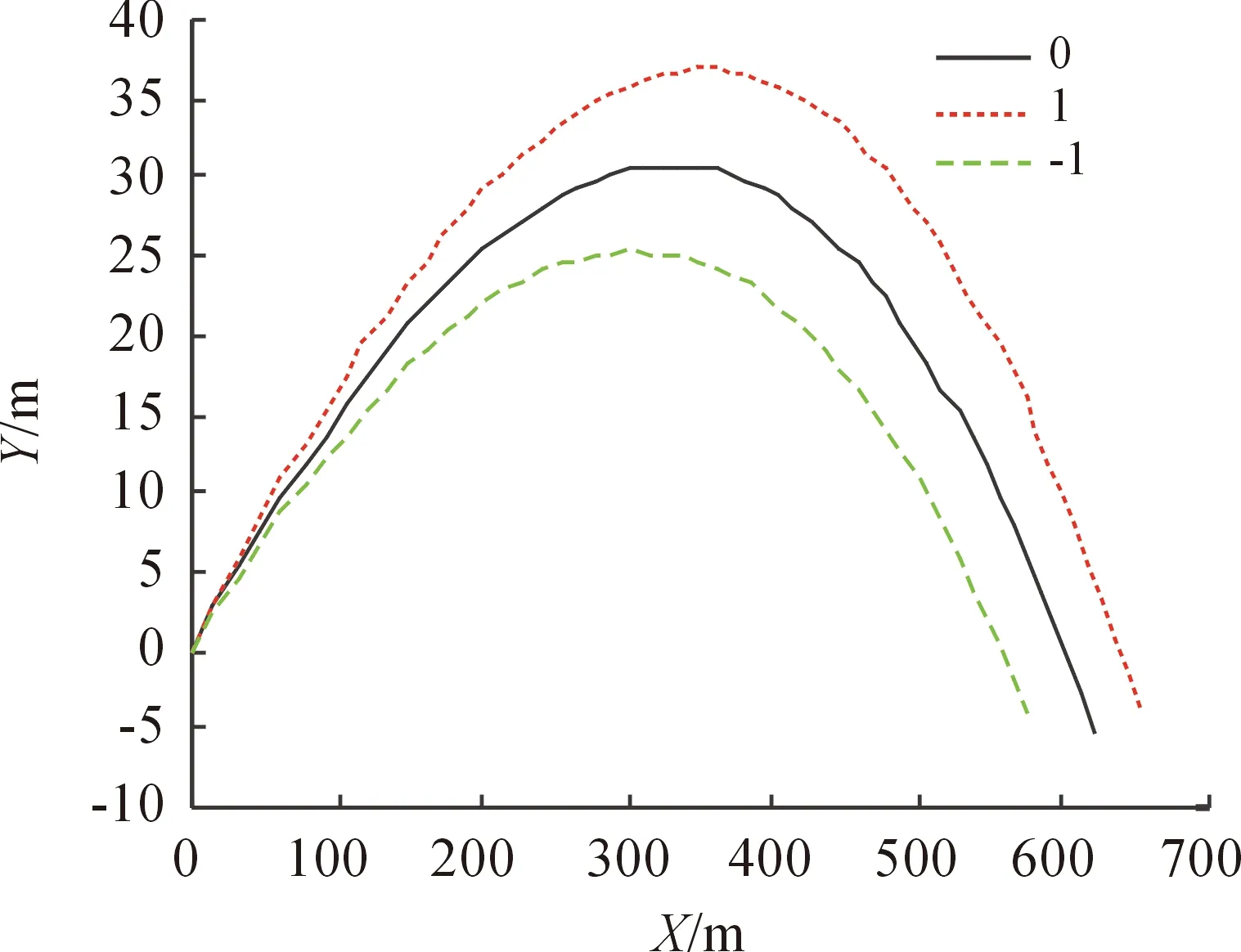
圖5 同初速、同側向發射角,不同縱向發射角誤差無控彈道
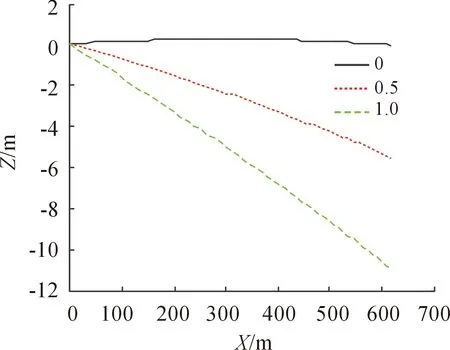
圖6 同初速、同縱向發射角,不同側向發射角誤差無控彈道
3.2 采用簡易修正后的火箭彈道分析
對采用了簡易制導技術后的近程末修火箭系統進行仿真分析。選取目標射程為600 m,其余仿真條件與無控彈道仿真標準條件相同,全程火箭彈飛行時間約5.1 s。
為了驗證簡易制導控制系統的起控時間和脈沖推力器總沖對彈道修正能力的影響。首先固定單發總沖Pimp=16 N·s,選取起控時間tc分別為2.3 s、2.8 s、3.3 s、3.8 s、4.3 s、4.8 s進行仿真,仿真彈道如圖7所示。

圖7 不同起控時間的有控彈道
由表1中脫靶量R來看,起控太早或太晚都對命中精度會產生不利影響,具體時間需要根據彈體參數與彈道相匹配來確定,本方案中匹配后最佳起控時間為3.8 s。

表1 起控時間與立靶精度的關系
固定起控時間tc=3.8 s,單發總沖Pimp分別為4 N·s、8 N·s、16 N·s、32 N·s、64 N·s,仿真彈道如圖8所示。
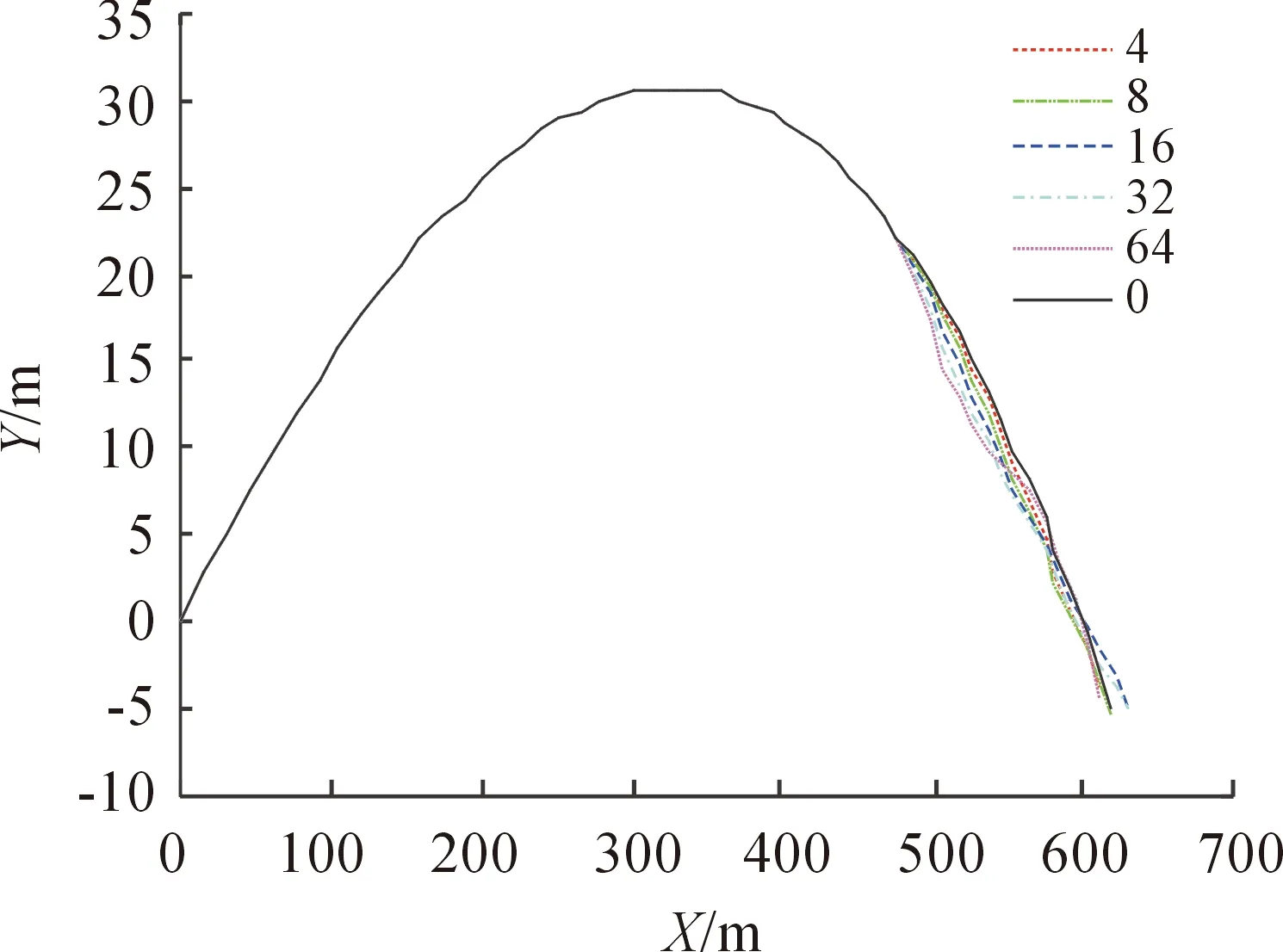
圖8 不同推力器總沖的有控彈道
由表2可知,對于相同的起控時間,推力器總沖的不同對命中精度和最大修正能力影響很大。隨著推力器總沖的提高,火箭彈的最大修正能力逐漸增強;但火箭彈的立靶精度(R)并不會隨推力器總沖的增加而減小,而是存在一個理想區間,可以通過權衡最大修正能力和修正精度進行選擇。以脫靶量R作為考核標準,本方案中最佳總沖為16 N·s。
從表1、表2來看,采用通用制導模塊進行修正后,彈丸的末端精度相較無控彈精度得到了大幅提升。但是,在采用該項技術時需要綜合考慮最大修正量和立靶命中精度之間的匹配關系,根據計算結果,文中選取起控時間3.8 s和單個總沖16 N·s作為最佳匹配值,進行了50次蒙特卡洛打靶試驗。

表2 脈沖推力器總沖與立靶精度和最大修正能力的關系
圖9為近程末修火箭在初速、射角以及導引頭測量誤差、推力器輸出誤差等干擾因素存在的情況下的蒙特卡洛打靶結果。從其中可以看出,經過簡易制導模塊修正后火箭彈的最終脫靶量小于1.2 m,精度效果較好。
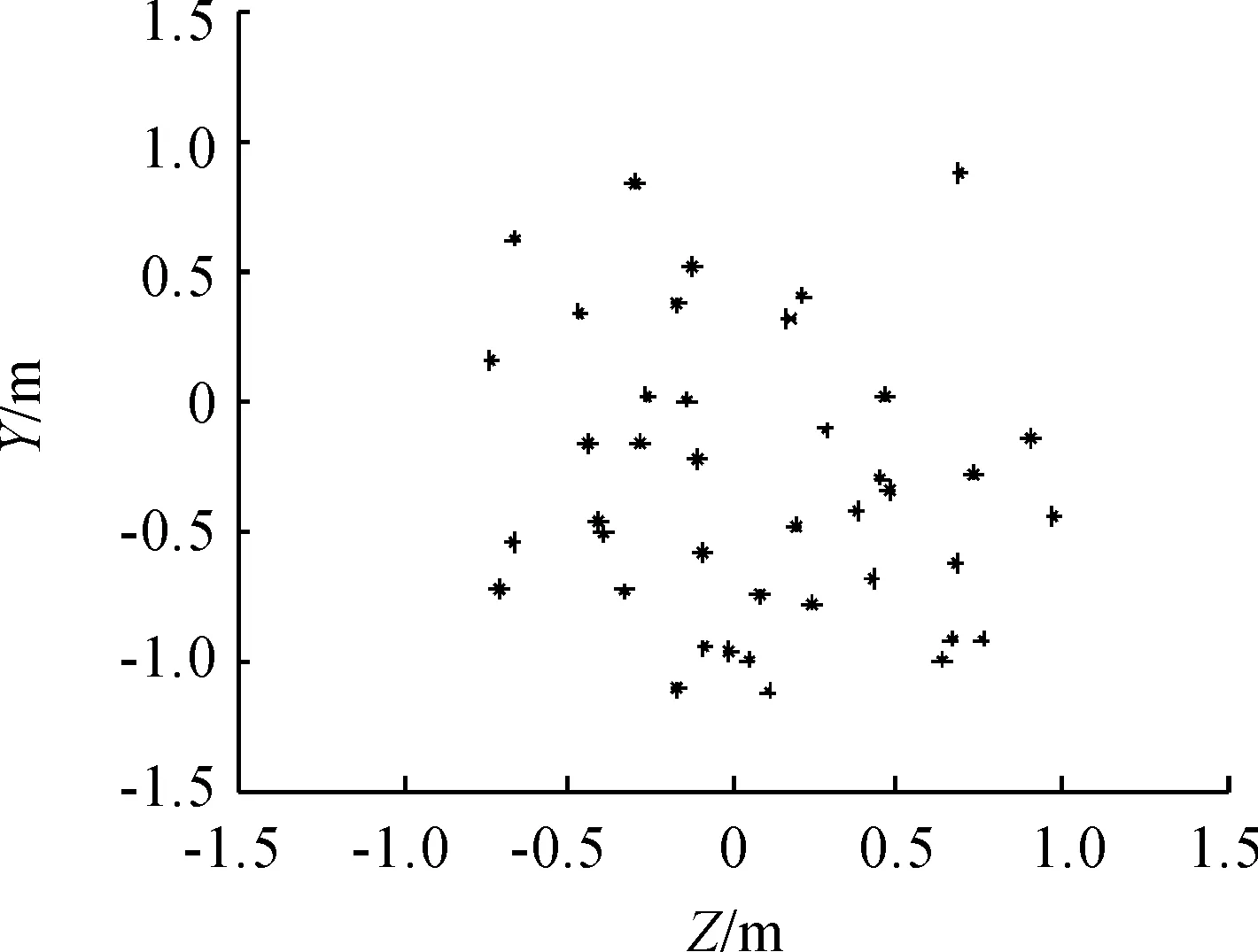
圖9 蒙特卡洛打靶結果
另外,通過簡易制導飛行試驗對仿真結果進行了驗證,試驗結果與仿真結果一致。圖10為火箭彈飛行過程中末修段推力器的工作狀態。

圖10 單兵末修火箭試驗
4 結論
在制導控制方案確定的情況下,合理匹配簡易制導火箭的起控時間、脈沖推力器總沖等關鍵參數,完全能夠滿足末修火箭彈對命中精度和最大修正能力的要求。在仿真條件下,發射初速誤差不大于4 m/s、縱側向發射角誤差分別小于1°范圍內時,最終脫靶量小于1.2 m,顯著提高近程火箭彈的命中精度,具有良好的工程應用前景。