三角陣列光電探測的雙彈丸識別方法
2019-12-03 02:07:42高豐佳鄭學明
兵器裝備工程學報 2019年11期
高豐佳,董 濤,陳 丁,鄭學明
(1.西安工業大學 陜西省光電測試與儀器技術重點實驗室,西安 710021; 2.中國兵器工業集團有限公司 黑龍江北方工具有限公司,黑龍江 牡丹江 157000)
射擊密集度是衡量身管武器系統性能的一項重要參數,其測試是兵器靶場試驗的重要內容。目前,國內外已研究出了多種著靶坐標測量的方法,如多光幕交匯測量法[1-4]、雙CCD交匯測量法[5-6]、聲學原理方法[7-8]等。以上這些測量方法各有其優勢,但當多彈丸著靶時,這些測量方法均存在一些缺陷,這可能導致彈丸測試過程中部分靶試數據丟失,或者理論上可行,但工程上實施難度較大,進而影響武器系統性能測試結果以及毀傷評估的科學性。
單管速射武器在有效射程內彈道可以視為直線[9],對其終點彈道進行損傷評估時,由于其射速較高,且各個彈丸飛行加速度存在一定的散布,可能存在后一發彈丸追上前一發彈丸的問題,即多彈丸同時著靶的現象。針對多彈丸同時過幕無法識別的問題,許多學者進行了研究,有研究人員提出在多光幕交匯測量法的基礎上增加光幕數量實現多彈丸同時著靶的識別[10-12];在雙CCD交匯測量法的基礎上增加CCD相機數量解決該問題[13]。上述2種方法都雖能解決雙彈丸同時著靶坐標測量問題,但均存在系統結構復雜、不便于裝調、校準困難,難以實現工程化等問題。
相較于雙彈丸同時著靶的概率,三彈丸及更多彈丸同時著靶的概率極低,可認為在有效射程內不會發生該事件[14],因此本項目只研究并解決如何識別雙彈丸同時著靶的坐標測量。本研究從雙彈丸同時著靶的問題入手,論述了三角光電探測陣列識別雙彈丸的原理,并對其測量雙彈丸著靶坐標原理進行建模分析,分析了其理論誤差變化規律,并進行靜態模擬實驗。
1 雙彈丸識別方法
1.1 工作原理
圖1為所提出的三角陣列光電探測系統組成示意圖。該裝置主要由鋁合金靶架、三個發光波段為780 nm的一字線激光器、等邊三角形靶筐、寬度為2 mm的半導體光電探測器件、透過中心波長為780 nm的濾光片和信號處理裝置等部分組成。將光電探測器件與濾光片整齊排列在三角形靶筐的三條邊上構成三角形光電探測陣列,在三角形的三個角上分別安裝一個激光器,光電探測陣列與激光器的出射光線共同構成測量幕面。當兩發彈丸同時穿過測量幕面時,激光器投射在光電探測陣列上的部分光線被彈丸遮住,從而在光電探測陣列上留下彈丸投影,然后經信號處理得到彈丸投影的中心位置坐標。
圖2為系統彈丸著靶坐標計算示意圖,彈丸1與2同時穿過測量幕面,設其著彈著點為E1與E2,激光器1(其發光點為A)發出的部分光線被彈丸擋住,然后其所對應的三角形靶筐CB邊的光電探測陣列上得到彈丸投影,通過信號處理裝置對光電探測陣列進行處理即可得到激光器1對彈丸投影的中心A1,A2點;同理,對CA與AB邊的光電探測陣列處理得到激光器2(其發光點為B)與激光器3(其發光點為C)對彈丸投影的中心B1,B2與C1,C2點。將激光器1的發光點A與它在對應邊BC上對彈丸投影得到的中心點A1,A2分別相連;將激光器2的發光點B與它在對應邊AC對彈丸投影得到的中心點B1,B2分別相連;將激光器3的發光點C與它在對應邊AB對彈丸投影得到的中心點C1,C2分別相連。連接得到的六條直線,其中3條直線交于一點的點即為彈丸著彈點。如圖2所示的直線A-A1、B-B1和C-C1的交點E1為彈丸1的著彈點,直線A-A2、B-B2和C-C2的交點E2為彈丸2的著彈點。

圖1 系統組成示意圖
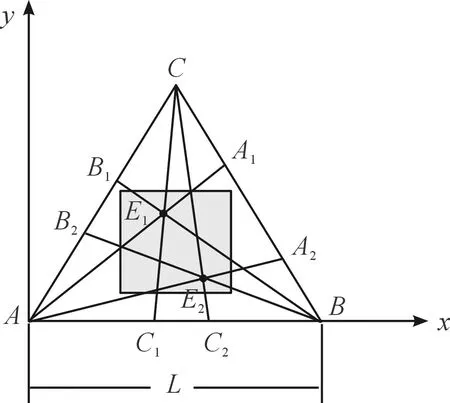
圖2 系統彈丸著靶坐標計算示意圖
1.2 測量模型
如圖2所示,以激光器1發光點A所在點為原點建立直角坐標系,則A點的坐標為(0,0),設B與C所在點的坐標分別為(xB,yB)、(xC,yC),通過的雙彈丸1與2的著彈坐標E1與E2分別為(xE1,yE1)、(xE2,yE2),光電探測陣列上彈丸投影的中心點A1的坐標為(xA1,yA1),A2的坐標為(xA2,yA2),B1的坐標為(xB1,yB1),B2的坐標為(xB2,yB2),C1的坐標為(xC1,yC1),C2的坐標為(xC2,yC2)。彈丸1著彈坐標E1可以由A-A1、B-B1、C-C1三條線中的任意兩條解出;彈丸2的著彈坐標E2同理。
以A-A1與B-B1兩條線來求解彈丸1著彈坐標E1為例:
直線A-C的斜截式方程為
(1)
直線B-C的斜截式方程為
即:
(2)
直線A-A1的斜截式方程為:
(3)
因為A1點在直線B-C上,則將坐標(xA1,yA1)代入式(2)得:
即:
yA1=K2(xA1-xC)+yC
(4)
將式(4)代入式(3)得:
(5)
直線B-B1的兩點式方程為:
(xB1-xB)(yE1-yB)=(yB1-yB)(xE1-xB)
(6)
將式(5)代入式(6)得:
(yB1-yB)(xE1-xB)
(7)
因為點B1在直線A-C上,則將坐標(xB1,yB1)代入式(1)得:
yB1=K1xB1
(8)
將式(8)代入式(7)并化簡得:
(9)
則彈丸E1的著彈點直角坐標為:
(10)
同樣分析直線A-A2與B-B2的方程可以得到彈丸E2的著彈點直角坐標為:
(11)
以A-A1與C-C1兩條線或者B-B1與C-C1兩條線來求解彈丸1著彈坐標E1與以A-A1與B-B1兩條線求解的結果時一致的,3種求解方法可以相互校準,這是本文交匯測量的優點之一。因3種求解方法分析過程一致,在此不再贅述。
2 理論誤差分析
上文中用A-A1與B-B1這兩條直線來求解彈丸1著彈點E1的坐標,因此,彈丸1著彈坐標E1與三個激光器發光點A、B、C和彈丸通過幕面時在光電探測陣列上的投影中心點A1、B1有關;則彈丸1著彈坐標E1的測量誤差也與以上因素有關。由等邊三角形靶筐的邊長得到激光器發光點A、B、C的坐標,又由上文公式分析得到,A1點的y方向坐標與其自身x方向的坐標有函數關系,如式(4)所示;B1點的y方向坐標與其自身x方向的坐標有函數關系,如式(8)所示;則彈丸1著彈坐標E1的測量誤差與A1點x方向的坐標和B1點x方向的坐標有關。以下為彈丸1著彈點E1的坐標測量誤差的公式
(12)
(13)
式中:ΔxE1和ΔyE1是彈丸1著彈坐標E1在x方向與y方向上的測量誤差;?xE1/?xA1,?yE1/?xA1分別為xE1,yE1對點A1的x坐標求偏導所得到的誤差傳遞系數;?xE1/?xB1,?yE1/?xB1分別為xE1,yE1對點B1的x坐標求偏導所得到的誤差傳遞系數;?xE1/?xB,?yE1/?xB分別為xE1,yE1對點B的x坐標求偏導所得到的誤差傳遞系數;?xE1/?yB,?yE1/?yB分別為xE1,yE1對點B的y坐標求偏導所得到的誤差傳遞系數;?xE1/?xC,?yE1/?xC分別為xE1,yE1對點C的x坐標求偏導所得到的誤差傳遞系數;?xE1/?yC,?yE1/?yC分別為xE1,yE1對點C的y坐標求偏導所得到的誤差傳遞系數;ΔxA1是點A1的x坐標的測量誤差;ΔxB1是點B1的x坐標的測量誤差;ΔxB是點B的x坐標的測量誤差即;ΔyB是點B的y坐標的測量誤差;ΔxC是點C的x坐標的測量誤差;ΔyC是點C的y坐標的測量誤差。
由于各型彈丸口徑不一,因此系統參數固定后對各型彈丸的分辨率也不盡相同。本文以口徑為5.8 mm的彈丸進行分析,其余口徑彈丸分析方法一致,且彈丸口徑較大時為了防止彈丸擊中靶筐,應相對應的增大系統參數。
在男人的指示下,楚墨進到一間茶室。茶室不大,裝修尚好,墻上掛一幅《對弈圖》,兩個閑人坐在地上,半光著膀子,酒葫蘆翻倒旁邊。古琴曲《瀟湘水云》飄起來了,小小的茶室里霎時云水掩映,煙波浩瀚。楚墨的心,也如同潮水般翻滾起來。
當L=5 m時,需要2 500×3個半導體器件。由于遠離三角形靶筐處比靠近靶筐處的測量精度高,為了得到良好的測量精度,測量靶面取三角形靶筐中心的范圍,大小為1 m×1 m。誤差仿真條件為:
1)在x方向上可測量范圍為0~5 m,則將x坐標的測量范圍取為2~3 m;
2)在y方向上可測量范圍為0~4.33 m,則y坐標的測量范圍取為1.665~2.665 m;
3)發光點A點的坐標為(0,0),發光點B的坐標為(0,5 000),發光點C的坐標為(2 500,4 330);
4)取A1點的數據讀取誤差的x方向上的測量誤差為ΔxA1=1 mm,取B1點的數據讀取誤差的x方向上的測量誤差為ΔxB1=1 mm;
如圖3與圖4所示,為三角形光電探測陣列測量雙彈丸坐標的誤差仿真結果。
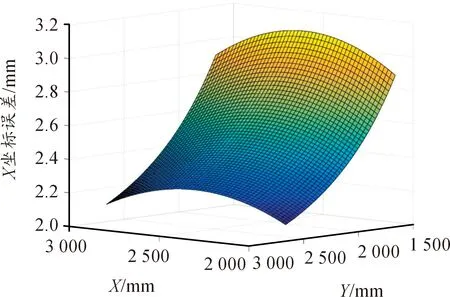
圖3 x坐標測量誤差分布

圖4 y坐標測量誤差分布
由圖可以得到以下結論:
2)當y方向坐標不變,x方向坐標以x=2.5 m為軸向兩邊增加或減小時,x方向的測量誤差緩慢減小,y方向的測量誤差緩慢增加;
3)當x方向坐標不變,y方向的坐標由小變大時,x方向的測量誤差顯著減小,y方向的測量誤差顯著增大;
4)在x方向上的最大測量誤差為3.107 mm,最小測量誤差為2.101 mm,在y方向上的最大測量誤差為2.789 mm,最小測量誤差為1.378 mm。
則分析仿真結果可得:三角形陣列光電探測系統可以對雙彈丸同時著靶情況下的坐標進行測量,在x方向上的測量誤差為2.101~3.107 mm,在y方向上的測量誤差為1.378~2.789 mm。
使用與分析彈丸1相同的方法分析彈丸2,對彈丸2著彈坐標E2進行誤差分析與仿真,得到的仿真結果與彈丸1著彈坐標E1的仿真結果相同,即彈丸2著彈點E2坐標:在x方向上的測量誤差為2.101~3.107 mm,在y方向上的測量誤差為1.378~2.789 mm。
3 靜態模擬實驗
由于單管超高速射武器兩發彈丸同時過幕的概率極低[14],因此,無法采用實彈射擊的動態試驗檢驗系統性能,但可以采用靜態實驗模擬兩發彈丸同時著靶來檢驗系統性能。靜態模擬實驗的裝置如下:一套三角陣列光電探測系統、兩個直徑為5.8 mm,長度為70 mm的圓柱形磁鐵棒和一個貼有坐標紙的鋼板。將貼有分辨率為1 mm×1 mm的坐標紙的鋼板放置在三角陣列光電探測系統的測量幕面后方,使得鋼板與測量幕面平行且均垂直于地面。鋼板與測量幕面的間距為50 mm;將圓柱形磁鐵棒作為模擬彈丸;將兩個模擬彈丸穿過測量幕面吸附在與系統有效測量靶面相對應的鋼板平面范圍內的任意位置,并使得磁鐵棒與測量幕面垂直。由系統測量得到一組模擬彈丸的坐標數據,記為(xE1,yE1)與(xE2,yE2),視為彈丸穿過幕面的測量值;由鋼板上的坐標紙可以直接讀得一組模擬彈丸的坐標數據,記為(xE1′,yE1′)與(xE2′,yE2′),視為彈丸穿過幕面的真值;那么彈丸的坐標測量誤差可以表示為
(14)
重復測量100組數據(如表1所示),表中的數據有一位估讀位,對實驗數據進行處理可以得到:系統測量得到的兩組坐標:x坐標測量誤差的絕對值最大為3.5 mm,y坐標測量誤差的絕對值最大為3.2 mm;x坐標測量誤差的平均值為1.75 mm,y坐標測量誤差的平均值為1.54 mm。
系統雙彈丸的識別范圍用Z表示,x坐標測量誤差的最大值用Xm表示,y坐標測量誤差的最大值用Ym表示,則由
(15)
可以得到Z=4.74 mm。當雙彈丸同時著靶的兩彈丸間距大于4.74 mm時,該測量系統就可以將雙彈丸區分開,既該系統的雙彈丸識別范圍不小于4.74 mm。實驗數據見表1。
4 結論
提出了一種采用半導體光電探測陣列配合一字線激光器構建三角陣列的雙彈丸坐標光電測量方法,建立了該測試系統的數學模型,推導了雙彈丸著靶坐標測量解析式,由誤差理論分析結果得到:三角形陣列光電探測系統識別雙彈丸時,在x方向上的測量誤差為2.101~3.107 mm,在y方向上的測量誤差為1.378~2.789 mm。靜態模擬實驗結果表明:該系統識別雙彈丸時,在x方向上的測量誤差為0.1~3.5 mm,在y方向上的測量誤差為0~3.2 mm,該方法可以實現間隔不小于4.74 mm雙發彈丸同時著靶的坐標測量,滿足超高速射身管武器系統的測試要求,且結構簡單、成本低、校準方便、易于實現工程化,但該方法針對彈丸散布較大的身管武器射擊密集度測試時,擴大后的探測靶面會出現探測靈敏分布不均,導致部分探測區域的目標捕獲率降低。
表1 靜態模擬實驗數據

組號每組編號紙靶xE′/mm測量靶xE/mm紙靶yE′/mm測量靶yE/mm誤差ΔxE/mm誤差ΔyE/mm0112 079.52 076.31 890.01 892.73.2-2.722 565.02 562.71 882.51 882.52.300212 308.02 307.21 268.51 271.30.8-2.822 175.02 171.51 723.51 721.43.52.10312 375.02 375.11 649.01 649.4-0.1-0.422 525.52 524.21 532.51 531.91.30.60412 406.02 404.81 311.51 312.51.2-1.022 963.02 962.91 912.51 910.60.11.9…1………………2………………9712 909.02 907.61 330.01 331.31.4-1.322 461.02 459.51 212.01 211.81.50.29812 304.02 303.11 168.51 168.20.90.322 712.52 711.11 226.51 229.71.4-3.29912 111.52 108.71146.01 144.82.81.222772.52 771.71 133.01 133.40.8-0.410012 353.52 351.81 046.01 043.91.72.122 634.02 632.91 070.51 070.71.1-0.2最大值3.5-3.2最小值0.10
注:小數點位為估讀位
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
計算機應用(2021年1期)2021-01-21 03:22:38
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45