南中國海“G-Argo”聲學浮標目標探測能力分析*
2019-12-04 07:41:56孫芹東張文清田德艷
應用聲學 2019年6期
王 超 孫芹東 張 林 張文清 田德艷
(1 海軍潛艇學院 青島 266199)
(2 青島海洋科學與技術國家實驗室 青島 266237)
0 引言
1998年,美、日等國的海洋科學家提出了全球海洋實時觀測計劃,即Argo計劃,構想用3~5年時間在全球大洋中每隔300 km布放一個自動剖面浮標用于獲取海洋內部2000 m深度以淺的次表層海流、溫度和鹽度等資料。這些資料的利用有利于提高對全球氣候變暖和海平面上升的預報精度,加深能量和水分平衡過程的了解,揭示海-氣相互作用的機理以及提高對長期天氣預報和短期氣候預測的能力等[1]。
近年來,隨著新型傳感器技術及水聲信號處理的發展,水下無人平臺的軍事應用得到了高度重視[2-8]。20世紀50年代,被動定向、主動定向和全向聲吶浮標相繼出現,使得聲吶浮標成為海軍在偵察敵方潛艇和反潛預警系統中廣泛使用的設備。20世紀70年代,美海軍將矢量傳感器成功應用在聲吶浮標上,矢量傳感器的應用進一步提高了聲吶浮標的探測精度。
2014年,中船重工第710所研制了一型探測定位浮標和記錄浮標,為了縮短研制周期,降低研制成本和研制風險,該浮標是基于深海型Argo剖面浮標為平臺設計的,該型浮標從工作原理和性能指標得到了初步的認定,但沒有得到充分驗證。
從2016年開始,青島海洋科學與技術國家實驗室和中船重工第710所通過對現有“HM2000”浮標平臺進行全新設計,對矢量水聽器設計、水下動平臺矢量水聽器應用技術、低噪聲目標自主探測技術等關鍵技術進行了攻關,目前已經成功研制出了國內第一個具有目標探測功能的多剖面“G-Argo”水下聲學浮標平臺原理樣機,并開展了水下聲學浮標平臺消聲水池驗證測試試驗和淺海適應性試驗。為進一步驗證“G-Argo”水下聲學浮標目標探測性能,于2018年5月在南中國海1500 m海深區域開展了為期5天的驗證試驗,試驗期間聲學系統水下無故障連續工作時間大于100 h。
1 聲學浮標平臺和數據處理方法
1.1 “G-Argo”水下聲學浮標
“G-Argo”水下聲學浮標平臺主要包括浮標平臺分系統和浮標聲學探測分系統兩大部分。其中,浮標平臺分系統主要由5個部分組成,包括主殼體、驅動裝置、控制、通信、電源等。主殼體部分主要用來承受外部水壓,保證設備密封耐壓;驅動裝置部分主要用于調節浮標浮力;控制部分用于控制液壓裝置、采集深度信息、控制浮標漂流深度、與聲學探測部分通信、系統電源管理等;通信部分用于北斗衛星通信、GPS定位和AIS數據接收;電源部分用于系統供電。浮標聲學探測分系統主要由3個部分組成,包括矢量水聽器[9-10]、多功能信號處理機、小型化AIS接收機,主要用于水下低噪聲目標信號探測與跟蹤。
1.2 數據處理方法
“G-Argo”水下聲學浮標平臺聲學探測系統采用單矢量水聽器加窗直方圖算法進行目標方位估計。加窗直方圖算法是基于復聲強器的一種統計方法,即在聲壓與質點振速共軛互譜的基礎上對處理頻帶內的每一頻點都進行方位估計,把全方位360°每隔1°或0.5°分成若干個方位區間,將計算頻點的估計方位按頻點數統計在相對應的方位區間里,然后找出頻點數最大值對應的方位即為目標估計方位,這種方法稱為直方圖統計法。在實際應用中,為增強矢量水聽器對弱目標的檢測能力,需通過時間累積的方式即時間加窗來提高矢量水聽器的處理增益,但累積時間的長度不宜太長或太短,累積時間太長對于方位變化率較快的目標會產生較大的方位估計偏差,累積時間太短則信號處理增益太小。本文采用5 s時間窗進行數據處理,處理頻段為100 Hz~3 kHz,單次計算FFT時間長度為1 s,FFT處理時間窗滑動時間間隔為0.25 s,得到17組聲強流譜,平均后用直方圖統計方法進行方位估計,這種通過時間加窗處理的方法稱為加窗直方圖法,該方法的計算流程如圖1所示。
圖1中i=1,···,17,乘法器的作用是對矢量水聽器接收到的水聲信號進行濾波,Filter(f)為1024階FIR帶通濾波器系數的傅里葉變換,θ(f)的計算表達式為
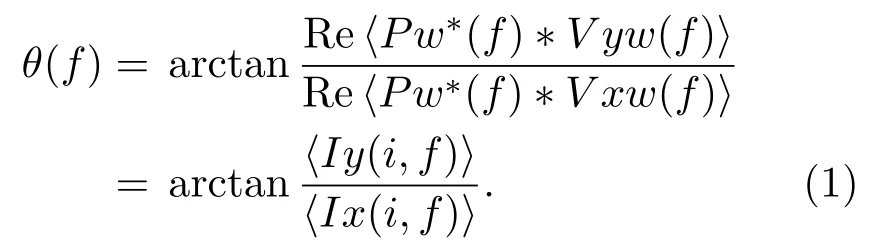
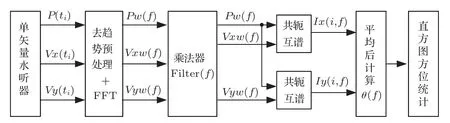
圖1 加窗直方圖方位估計流程圖Fig.1 The flow chart of windowed histogram orientation estimation
由式(1)可以看出,通過式(1)計算出的目標方位與頻率f有關,不同頻點處的目標方位估計值不同,通過加窗直方圖估計目標方位的方法可以將環境中存在的窄帶干擾和強線譜干擾抑制,但當環境中存在多目標且輻射噪聲頻率相互重疊時,加窗直方圖方法則無法得到各目標的真實方位,只能獲得各目標聲能流的合成方位,此合成方位會偏向強度較大的目標方位。直方圖方位統計是將目標估計方位θ(f)按頻點數統計在相對應的方位區間里,如果按1°劃分方位區間,則有
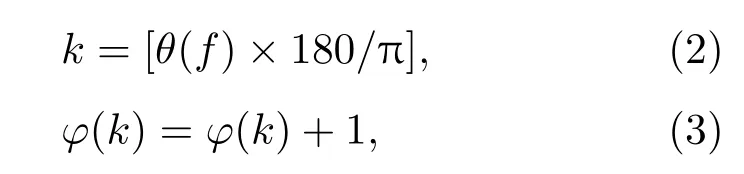
其中,[]表示取整運算,如果θ(f)≤ 0,則加360°,使目標估計方位落在合理區間[1°360°]上。φ為方位估計在各個角度處的頻數,其最大值對應的角度值即為目標估計方位。
2 數據處理結果分析
2018年5月,在南中國海1500 m海深區域開展了為期5天的多臺水下聲學浮標探測性能驗證試驗(以下試驗結果選用5月某日的試驗數據),試驗期間海況較好(約為2級),采用1/3倍頻程方法計算得到的海洋環境噪聲譜級約為54 dB@1 kHz,如圖2所示。圖3給出了用溫鹽深儀測量得到的聲速剖面,圖3中紅色實線為實際測量結果,藍色虛線為歷史數據擬合結果,可以看出,在海深30 m以內是均勻層,30~600 m為負梯度。試驗期間用船載AIS接收機接收周圍航船信息。

圖2 試驗期間海洋環境噪聲譜級Fig.2 Ambient noise level during the test
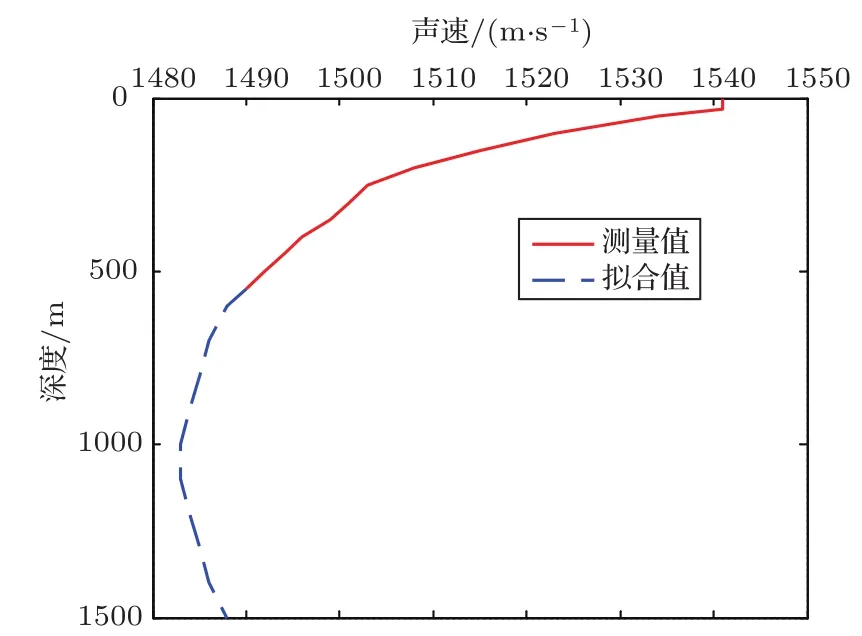
圖3 試驗期間聲速剖面Fig.3 Sound velocity profile during the test
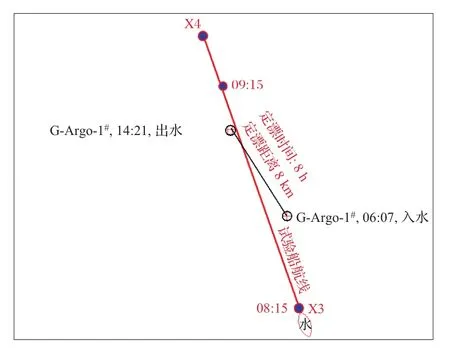
圖4 G-Argo-1#浮標平臺與試驗船相對位置Fig.4 Relative position of G-Argo-1#buoy platform and test ship
圖4給出了G-Argo-1#水下聲學浮標平臺與試驗船相對位置,G-Argo-1#浮標平臺06:07時刻布放入水,14:21時刻上浮至水面,水下連續工作時長約8 h,期間浮標平臺沿327°方向漂離布放位置點約8 km,浮標平臺漂移速度平均約為0.5 kn。GArgo-1#浮標平臺聲學系統06:28時刻上電啟動開始工作,此時浮標平臺深度50 m,下潛用時21 min。浮標平臺聲學系統14:09時刻斷電停止工作,之后便排油上浮,此時浮標平臺深度71 m,上浮用時12 min。G-Argo-1#浮標設置漂移深度100 m,容差±50 m,即浮標平臺在50~150 m之間電機不工作,浮標深度大于50 m后聲學系統上電啟動工作,圖5給出了G-Argo-1#浮標平臺聲學系統工作期間平臺深度隨時間變化情況,由圖5可以看出,G-Argo-1#浮標平臺在整個定深漂流工作階段的深度基本穩定在75 m左右。
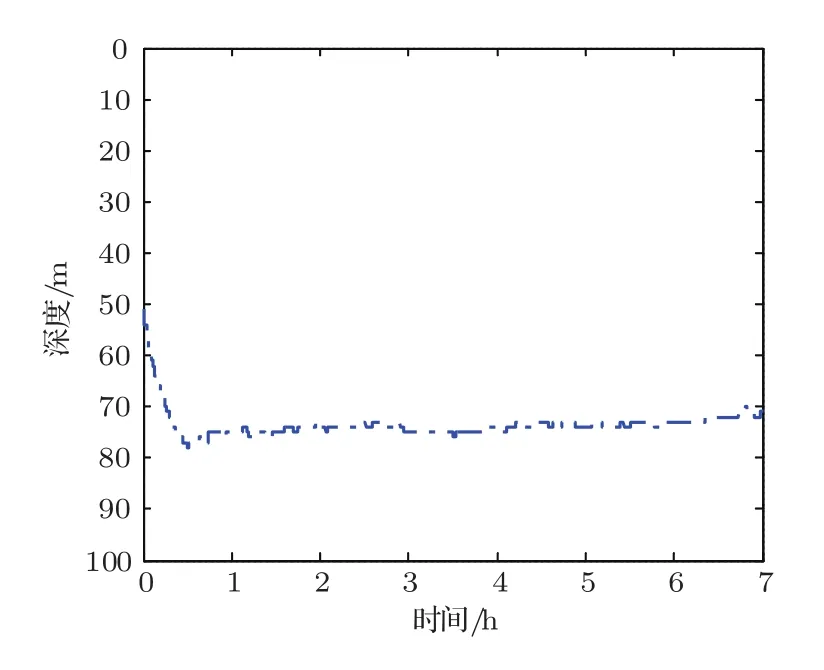
圖5 浮標平臺深度隨時間變化Fig.5 Buoy platform depth changes over time
圖6給出了G-Argo-1#浮標平臺聲學系統計算輸出的試驗船(船長40 m、船寬8 m、噸位約600 t)方位歷程與GPS方位歷程對比及試驗船相對于G-Argo-1#浮標平臺距離歷程,圖7是G-Argo-1#浮標聲學系統計算輸出的試驗船方位歷程灰度圖,浮標平臺與試驗船在該時間段試驗過程中的態勢如圖4所示。圖6和圖7試驗過程對應時段為09:01-10:14,此時間段內,試驗船先遠離浮標平臺,到距離浮標平臺約7 km后再靠近浮標平臺,到最近距離約0.4 km后再遠離浮標平臺,最后到最遠距離10.3 km后停車。由圖6和圖7可以看出,G-Argo-1#水下聲學浮標對航速10 kn的試驗船目標在整個09:01-10:14時間段內均可完成目標測向,對航速10 kn試驗船目標的最遠探測距離大于10.3 km,但由于浮標平臺推算位置點存在偏差,因此目標估計方位與GPS真實方位間存在一定偏差,特別在距離較近的位置點附近,方位偏差相對較大。
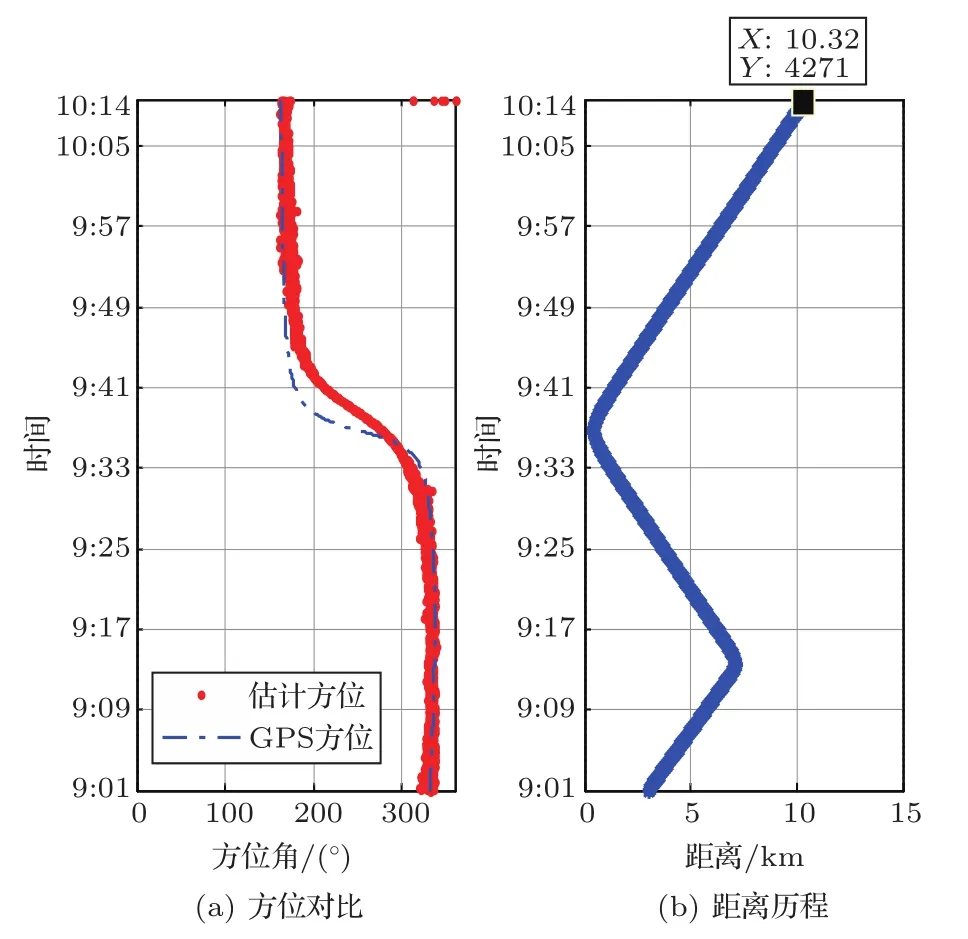
圖6 試驗船估計方位與GPS真實方位對比及距離歷程Fig.6 Test ship estimation orientation and target true GPS azimuth comparison and distance over time
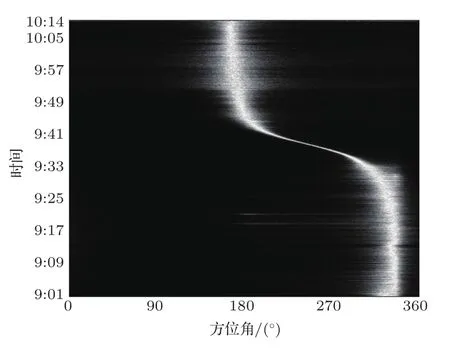
圖7 試驗船方位估計歷程灰度圖Fig.7 The grayscale of ship noise estimation azimuth
圖8給出了G-Argo-1#浮標平臺在10:31-13:35時間段內聲學系統計算輸出的航船噪聲估計方位歷程與GPS真實方位歷程對比,以及試驗船相對于G-Argo-1#浮標平臺距離歷程和船載AIS接收機接收到的MMSI號為412461570(船長87 m、船寬14 m、吃水25.5 m)的工程船相對于G-Argo-1#浮標平臺距離歷程。圖9是G-Argo-1#浮標聲學系統在10:31-13:35時間段內接收到的航船噪聲估計方位歷程灰度圖,圖10為浮標平臺與試驗船和工程船相對運動態勢圖。通過查看船載AIS接收機在 10:31-13:35時間段接收到的AIS信號,發現在10:31-13:35時間段內共有4艘工程船經過浮標平臺,分別為:MMSI號為412461570的工程船,航速6.4 kn,航向149°;MMSI號為412480414的工程船,航速6.1 kn,航向146°;MMSI號為412480368的工程船,航速8.9 kn,航向153°;MMSI號為412468067的工程船,航速8.4 kn,航向148°。其中MMSI號為412461570的工程船距離浮標平臺較近,經與該工程船發送的GPS信息比對,G-Argo-1#浮標平臺在10:31-13:35時間段內可全程探測該工程船并給出其方位,由于13:35時刻G-Argo-1#浮標平臺的聲學系統斷電,平臺開始排油上浮,浮標平臺聲學系統沒能接收到該工程船更遠距離的航行噪聲信號。由以上分析可知,G-Argo-1#水下聲學浮標對MMSI號為412461570、航速6.4 kn的工程船目標最遠探測距離大于19.3 km。
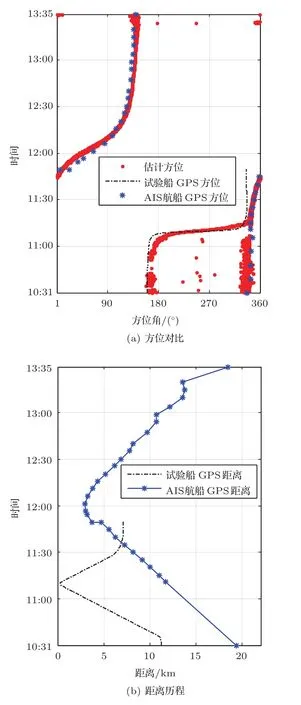
圖8 航船估計方位與GPS計算方位對比以及利用GPS數據計算的目標距離歷程Fig.8 Comparison of estimated position and GPS position of the ship and GPS calculated target distance history
由圖8和圖9可以看出,10:31-11:53時間段內,在G-Argo-1#浮標160°和335°方位附近存在兩個噪聲信號,且335°方位附近噪聲信號較強,經與試驗船GPS比對分析和查看船載AIS接收機接收到的AIS信號,確定160°方位附近噪聲信號對應試驗船目標,試驗船在10:35-11:35時間段內航向340°航速10 kn航行,當試驗船距離浮標平臺小于2 km時,G-Argo-1#浮標平臺聲學系統接收到的試驗船噪聲信號強于工程船噪聲信號,而在其他時間段,工程船噪聲信號則強于試驗船噪聲信號。
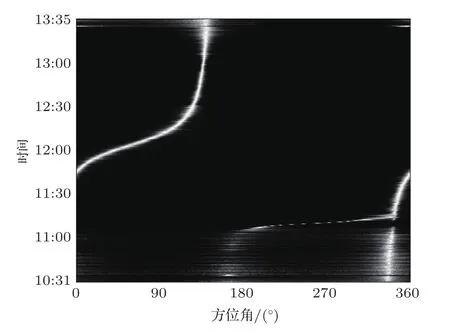
圖9 航船噪聲估計方位歷程灰度圖Fig.9 Ship noise estimation azimuth history gray map
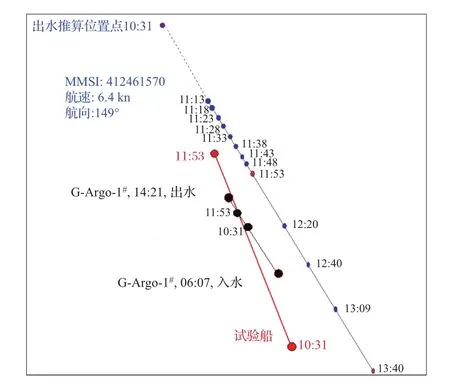
圖10 浮標平臺與試驗船和工程船的相對運動態勢Fig.10 Relative position of buoy platform and test ship and engineering ship
圖11給出了G-Argo-5#浮標平臺在10:55-13:00時間段內聲學系統計算輸出的航船噪聲估計方位歷程與試驗船、MMSI412461570工程船、MMSI477002900集裝箱船(船長128 m、船寬21 m、吃水5 m)和MMSI563849000集裝箱船(船長151 m、船寬25 m、吃水8.8 m)的GPS計算方位歷程對比,以及各航船相對于G-Argo-5#浮標平臺的GPS數據計算距離歷程。圖12是G-Argo-5#浮標聲學系統在10:55-13:00時間段內接收到的航船噪聲估計方位歷程灰度圖,圖13為該時間段內各船只的相對運動態勢圖。
通過查看船載AIS接收機在10:55-13:00時間段接收到的AIS信號,發現浮標平臺附近只有MMSI477002900集裝箱船、MMSI563849000集裝箱船和試驗船,而沒有發現工程船的AIS信號。10:55-13:00時間段內工程船的位置點是通過13:34時刻工程船的位置點、航向、航速及船訊網搜索工程船歷史航跡綜合推算得出的,工程船在10:55-11:21時間段內航速6.4 kn、航向4°,11:21-13:00時間段內航速6.4 kn、航向233°。在10:55-13:00時間段內,MMSI477002900集裝箱船航速12 kn、航向190°,MMSI563849000集裝箱船航速14.5 kn、航向212°,試驗船在10:55-12:28時間段內航速10 kn、航向160°,12:28-13:00時間段內試驗船停止。
由圖11和圖12可以看出,10:55-11:12時間段內,G-Argo-5#浮標聲學系統主要接收工程船噪聲信號,根據GPS數據計算方位確定為工程船目標,此時間段工程船距離浮標平臺最遠達42.8 km(11:12時刻),此時工程船與浮標平臺距離較遠,浮標聲學系統接收工程船目標信號信噪比較低,因此目標估計方位的均方根誤差較大(約30°)。11:12-11:54時間段內,G-Argo-5#浮標聲學系統主要接收試驗船航船噪聲信號,根據GPS計算方位確定為試驗船目標,由于浮標推算位置存在偏差,因此試驗船目標計算方位與GPS數據計算給出的真實方位間存在一定偏差,此時間段內試驗船距離浮標平臺最遠11 km(11:12時刻)。11:54-12:45時間段內,G-Argo-5#浮標聲學系統主要接收集裝箱船(MMSI477002900)噪聲信號,根據GPS數據計算方位確定為集裝箱船(MMSI477002900)目標,此時間段集裝箱船(MMSI477002900)距浮標平臺最遠距離為15.8 km(11:54時刻)。12:45-13:00時間段內,G-Argo-5#浮標聲學系統根據GPS數據計算方位確定為集裝箱船(MMSI563849000)目標,此時間段集裝箱船(MMSI563849000)距浮標平臺最遠距離為24 km(1300時刻),同時在11:57-13:00時間段內,浮標聲學系統也可計算出工程船目標方位,此時間段工程船距浮標平臺最遠距離為36.4 km。由以上分析可知,G-Argo-5#浮標對船長40 m、船寬8 m、噸位約600 t、航速10 kn的試驗船目標的最遠探測距離大于11 km;對船長87 m、船寬14 m、吃水25.5 m、航速6.4 kn的工程船目標的最遠探測距離可達42.8 km;對船長128 m、船寬21 m、吃水5 m、航速12 kn的集裝箱船目標的最遠探測距離大于15.8 km;對船長151 m、船寬25 m、吃水8.8 m、航速14.5 kn的集裝箱船目標的最遠探測距離大于24 km。
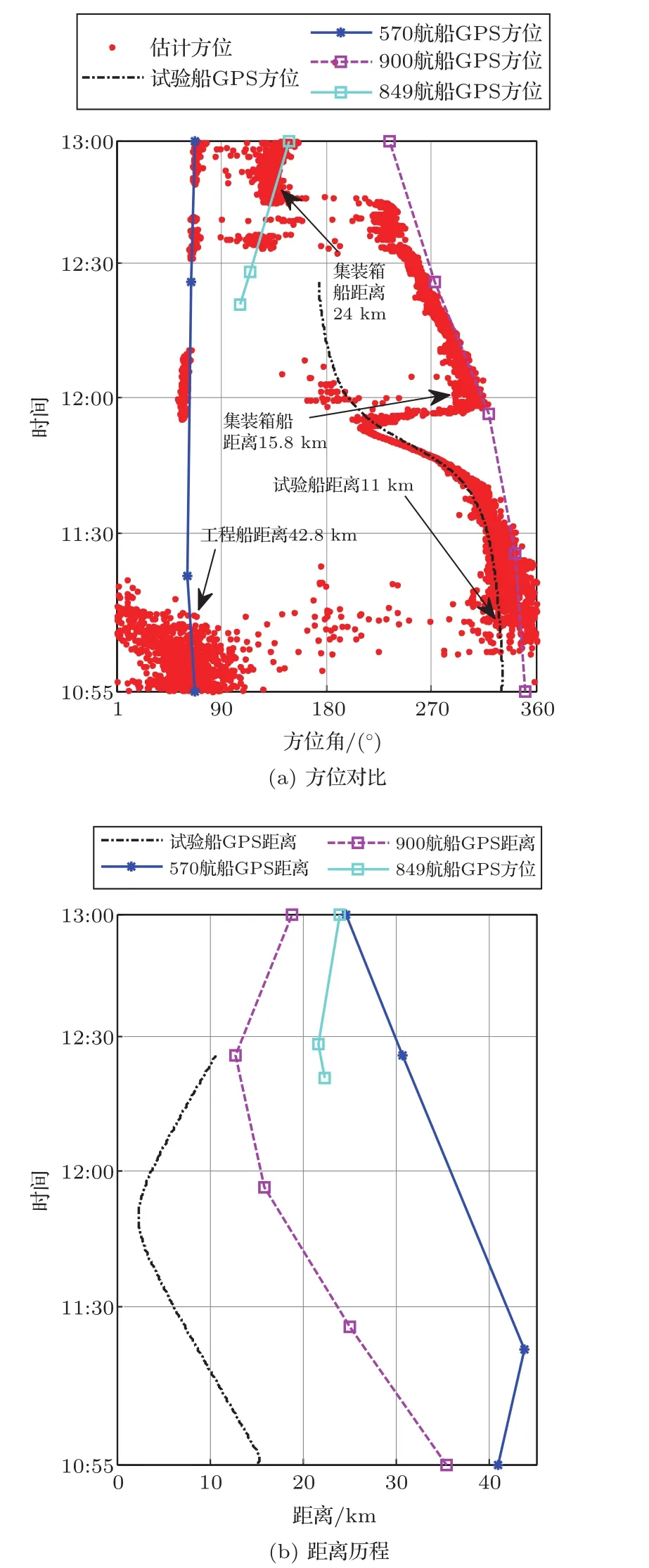
圖11 航船估計方位與GPS數據計算給出的方位對比以及GPS數據計算給出的目標距離歷程Fig.11 Comparison of estimated position and GPS position of the ship and distance history
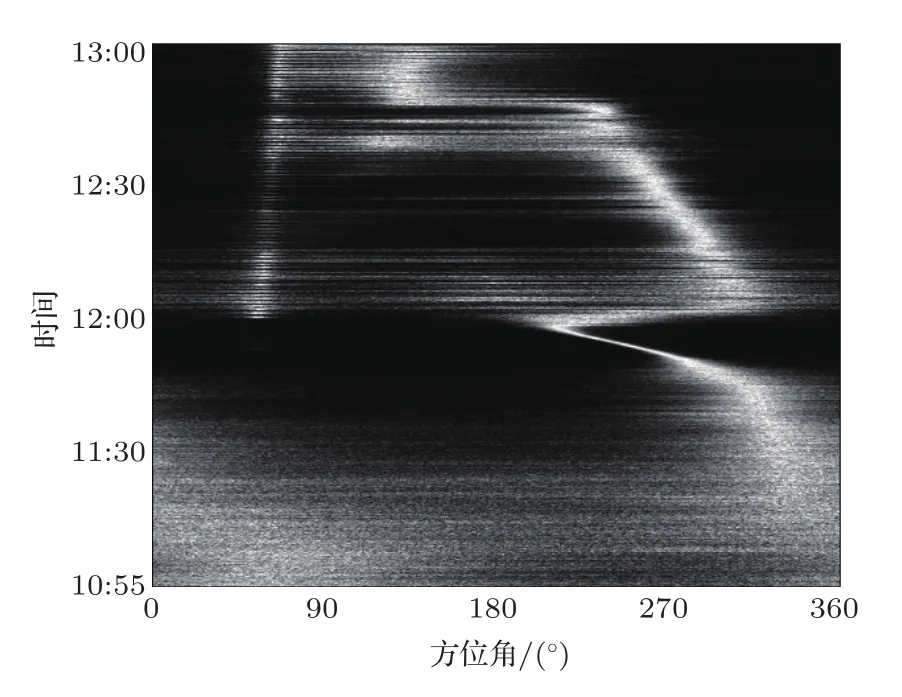
圖12 航船噪聲方位估計歷程灰度圖Fig.12 Ship noise estimation azimuth history gray map
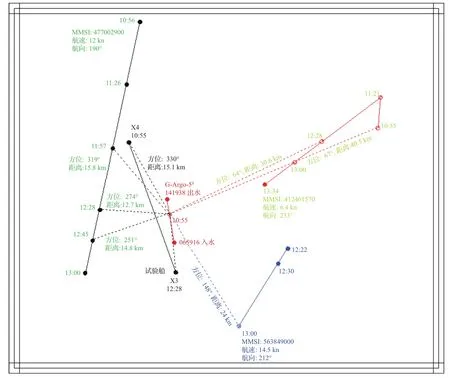
圖13 浮標平臺與試驗船和附近航船的相對運動態勢Fig.13 Relative position of buoy platform and test ship and nearby ship
3 結論
2018年5月在南中國海海區組織的水下聲學浮標試驗結果表明:“G-Argo”水下聲學浮標對海上目標具有良好的探測性能,可作為一種行之有效的聲學探測手段,快速形成大面積區域目標探測能力,其研制成功可在一定程度上緩解我國水下信息獲取手段的不足,有利于提升我國水下無人平臺軍事應用能力,促進海洋科學研究進步。