基于反步法的差動(dòng)轉(zhuǎn)向無(wú)人車(chē)輛軌跡跟蹤*
2019-12-06 02:46:46余卓平侯譽(yù)燁陳素琴
汽車(chē)工程 2019年11期
關(guān)鍵詞:系統(tǒng)
余卓平,侯譽(yù)燁,熊 璐,陳素琴
(同濟(jì)大學(xué)汽車(chē)學(xué)院,上海 201804)
前言
差動(dòng)轉(zhuǎn)向無(wú)人車(chē)輛(SSUV)主要應(yīng)用在一些特殊場(chǎng)景來(lái)提高六輪車(chē)輛在崎嶇道路上的轉(zhuǎn)向行駛能力。而高速極限轉(zhuǎn)向或濕滑工況要求作戰(zhàn)車(chē)輛配備一個(gè)側(cè)向穩(wěn)定性控制系統(tǒng),這使SSUV在軍事領(lǐng)域受到廣泛關(guān)注。
SSUV高速路徑跟蹤控制系統(tǒng)為欠驅(qū)動(dòng)機(jī)械系統(tǒng),并呈現(xiàn)高階強(qiáng)非線(xiàn)性非仿射輸入的特點(diǎn)。車(chē)輛質(zhì)心側(cè)偏角作為系統(tǒng)的內(nèi)動(dòng)態(tài),不能被任意配置。如何實(shí)現(xiàn)高速下SSUV路徑跟蹤時(shí)內(nèi)動(dòng)態(tài)的穩(wěn)定是目前存在的難點(diǎn)。
在SSUV路徑跟蹤控制器的研究中,動(dòng)力學(xué)模型是路徑跟蹤控制器設(shè)計(jì)和分析的基礎(chǔ)。常用模型采用車(chē)輛笛卡爾坐標(biāo)和航向角來(lái)表述車(chē)輛的位置和方向。相關(guān)研究廣泛采用非完整約束建模[1],其中以零質(zhì)心側(cè)偏角假設(shè)最為常見(jiàn)。另外一種常在SSUV上施加的非完整約束是假設(shè)車(chē)輛運(yùn)動(dòng)的瞬心在車(chē)輛坐標(biāo)系縱軸上投影為定值,如圖1所示。通過(guò)忽略低速運(yùn)動(dòng)的SSUV的側(cè)滑運(yùn)動(dòng),來(lái)降低問(wèn)題的復(fù)雜性。但非完整約束并不適用于高速大側(cè)向加速度工況下的軌跡跟蹤系統(tǒng)。另一方面,一些研究人員則不采用任何非完整約束,直接建立車(chē)輛的動(dòng)力學(xué)方程。本文中面向SSUV高速運(yùn)動(dòng)控制系統(tǒng)設(shè)計(jì),因此采用第2種建模方式。

圖1 瞬心縱向分量固定約束
現(xiàn)有的對(duì)于系統(tǒng)內(nèi)動(dòng)態(tài)鎮(zhèn)定的非線(xiàn)性控制方法主要有以下幾種研究方法。對(duì)于簡(jiǎn)單的系統(tǒng),可采用在平衡點(diǎn)處局部線(xiàn)性化后用線(xiàn)性的方法設(shè)計(jì)控制。顯然,局部線(xiàn)性化具有一定的局限性。另外,當(dāng)系統(tǒng)具有特殊的結(jié)構(gòu)形式時(shí),可運(yùn)用相對(duì)應(yīng)的特定方法進(jìn)行鎮(zhèn)定。比如,對(duì)于下三角結(jié)構(gòu)的系統(tǒng)采用反步法進(jìn)行鎮(zhèn)定。但一般來(lái)說(shuō),為維數(shù)較高的非線(xiàn)性系統(tǒng)設(shè)計(jì)具有全局穩(wěn)定性質(zhì)的控制器十分困難。比較常見(jiàn)的解決方案是將高維的系統(tǒng)分解為若干個(gè)維數(shù)較低而互聯(lián)的子系統(tǒng)。
近來(lái),SSUV控制邏輯受到越來(lái)越多的關(guān)注,Jackson等[2]采用了直接橫擺力矩控制來(lái)提高六輪車(chē)輛在轉(zhuǎn)向時(shí)的穩(wěn)定性。Kang等[3]通過(guò)分層控制思想直接控制輪胎力來(lái)實(shí)現(xiàn)軌跡跟蹤控制。Yi等[4]設(shè)計(jì)了一個(gè)滑模跟蹤控制器并提出了相應(yīng)的李雅普諾夫穩(wěn)定性分析。滑模控制可實(shí)現(xiàn)對(duì)不同參考軌跡漸進(jìn)地穩(wěn)定跟蹤誤差[5-6]。Aslam等[7]針對(duì)高速轉(zhuǎn)向的差動(dòng)車(chē)輛設(shè)計(jì)了一種魯棒的反饋控制器。而文獻(xiàn)[8]中提出最優(yōu)控制方法和非線(xiàn)性模型預(yù)測(cè)控制方法。Elshazly等[9]提出了一種LQR控制器并對(duì)降階的增廣動(dòng)力學(xué)模型采用前饋補(bǔ)償。對(duì)比這些方法,反步法比較容易實(shí)現(xiàn)輸入狀態(tài)穩(wěn)定。反步法具有構(gòu)造性的特點(diǎn),不依賴(lài)系統(tǒng)參數(shù)的完全精確,也更容易實(shí)現(xiàn)魯棒與自適應(yīng)控制。文獻(xiàn)[10]中通過(guò)有界反步法實(shí)現(xiàn)了存在執(zhí)行器飽和情況下的非最小相VTOL飛行器對(duì)參考狀態(tài)軌跡的輸出反饋跟蹤。文獻(xiàn)[11]中則通過(guò)一步向前反步法實(shí)現(xiàn)了Uni-cycle的全部飽和軌跡跟蹤控制。不難發(fā)現(xiàn),反步法適用于差動(dòng)轉(zhuǎn)向車(chē)輛的控制,本文中將設(shè)計(jì)基于反步法的軌跡跟蹤控制器。
1 車(chē)輛模型
選擇目標(biāo)軌跡上目標(biāo)點(diǎn)的切線(xiàn)方向和其垂直方向構(gòu)成衡量跟蹤誤差的坐標(biāo)系,如圖2所示。選擇車(chē)輛狀態(tài)變量為跟蹤誤差ex和ey,可得如下?tīng)顟B(tài)方程:

式中:φ1為實(shí)際車(chē)速v與目標(biāo)車(chē)速vr的夾角;φ2為縱軸xr與大地坐標(biāo)系X軸的夾角;γr為目標(biāo)橫擺角速度。忽略滾動(dòng)阻力、空氣阻力和坡度阻力后,車(chē)輛動(dòng)力學(xué)狀態(tài)方程為

式中:β為質(zhì)心側(cè)偏角;ax和ay分別為縱向和側(cè)向加速度;γ為橫擺角速度;Iz為轉(zhuǎn)動(dòng)慣量;Mz為作用到車(chē)輛上的橫擺力矩。

圖2 車(chē)輛軌跡跟蹤動(dòng)力學(xué)
2 動(dòng)力學(xué)控制器
對(duì)于差動(dòng)轉(zhuǎn)向無(wú)人車(chē)輛的控制系統(tǒng),本文中采用分層控制方法來(lái)設(shè)計(jì)控制器。由于系統(tǒng)欠驅(qū)動(dòng)和內(nèi)動(dòng)態(tài)不穩(wěn)定的特點(diǎn)[12-13],直接處理輸出跟蹤問(wèn)題會(huì)導(dǎo)致系統(tǒng)不穩(wěn)定[14],故將系統(tǒng)轉(zhuǎn)換為平衡點(diǎn)鎮(zhèn)定問(wèn)題。假設(shè)參考航向角的1階導(dǎo)數(shù)和目標(biāo)車(chē)速不隨時(shí)間而變,即車(chē)輛動(dòng)力學(xué)系統(tǒng)存在平衡點(diǎn),而控制器的目標(biāo)就是鎮(zhèn)定該平衡點(diǎn),然后通過(guò)考慮平衡點(diǎn)的變化作為系統(tǒng)的擾動(dòng)從而保證控制器的魯棒性,系統(tǒng)如圖3所示。
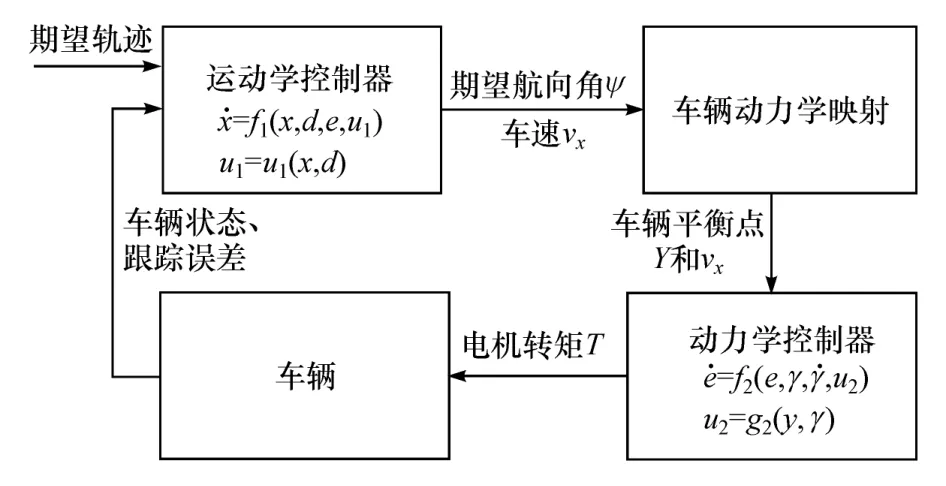
圖3 差動(dòng)轉(zhuǎn)向無(wú)人車(chē)輛控制系統(tǒng)
2.1 車(chē)輛速度控制
定義跟蹤誤差 v~x=vx-vxc,其微分方程為

設(shè)計(jì)反饋線(xiàn)性化控制律以跟蹤目標(biāo)車(chē)速:

但式(4)可能產(chǎn)生過(guò)大的需求縱向力,同時(shí)也可能導(dǎo)致側(cè)向力的嚴(yán)重喪失,加劇車(chē)輛失穩(wěn)和側(cè)滑。因此,當(dāng)車(chē)輛速度誤差超過(guò)一定限度時(shí),施加如下飽和控制:

式中:k1>0,θ2>θ1>0;sw1(v)為在 vthre1與 vthre2之間從0~1的一個(gè)連續(xù)過(guò)渡函數(shù)。假設(shè)參考車(chē)速一定,則車(chē)速將被保持在上邊界vthre2以下。
分析車(chē)速vx>0的情況,考慮v≥vthre2的情形。如圖4所示,當(dāng)且,則

另一方面,當(dāng) |vx|≤k1-1θ1+vxc,利用 v≥vthre2>

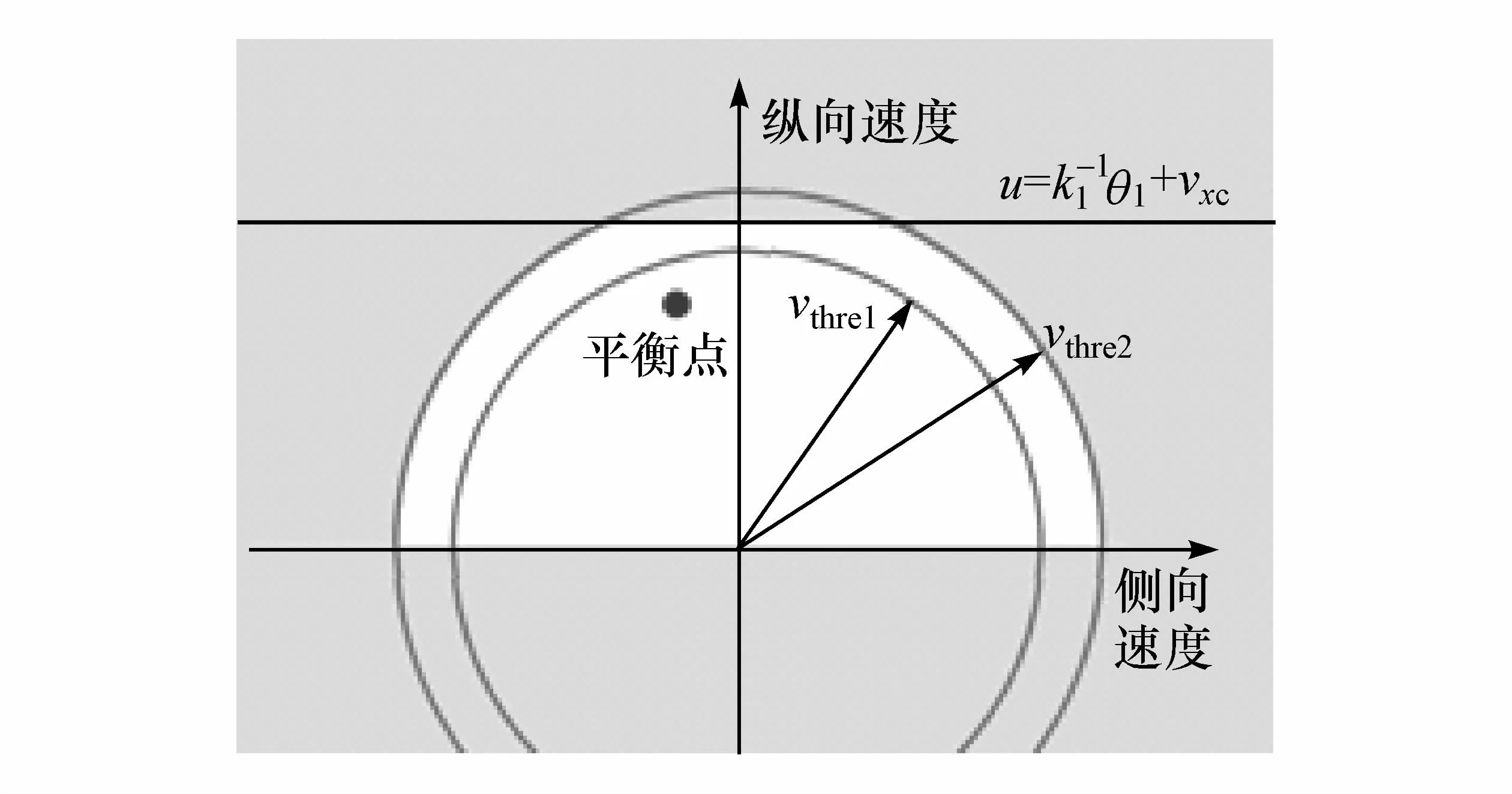
圖4 速度控制域
由式(5)可知,因?yàn)?v≥vthre2所以 axvx<0。且當(dāng)車(chē)輛速度較高時(shí),vy≠0,ayvy<0。故v≥vthre2,v·<0,因此車(chē)速將得到限制。
2.2 車(chē)輛橫擺運(yùn)動(dòng)控制
定義跟蹤誤差 β~=β-βs,γ~=γ-γs,則其微分方程為

其中:

式中:βs和γs為側(cè)偏角和橫擺角速度在平衡點(diǎn)處的值;u為控制器的輸入當(dāng)運(yùn)動(dòng)控制層給出的航向角的2階導(dǎo)數(shù)滿(mǎn)足對(duì)應(yīng)車(chē)輛的一個(gè)平衡點(diǎn),則其 1階導(dǎo)數(shù)滿(mǎn)足條件0),則質(zhì)心側(cè)偏角跟蹤偏差的微分方程可做以下變換:

如式(9)所示,狀態(tài)方程具有上三角結(jié)構(gòu)特點(diǎn),因此可參考反步法對(duì)其控制律進(jìn)行設(shè)計(jì)。

對(duì)偽控制輸入進(jìn)行求導(dǎo),可得


選擇實(shí)際控制輸入為

則系統(tǒng)的微分方程可改寫(xiě)為

選擇如下的李雅普諾夫函數(shù):

對(duì)其求導(dǎo)可得


研究表明,車(chē)輛在非極限條件下,輪胎的縱向力和橫擺力矩對(duì)側(cè)向力的影響不大,故可得

式中kbeta為車(chē)輛的等效側(cè)偏剛度。則

因此,通過(guò)約束上層運(yùn)動(dòng)控制輸出的目標(biāo)參考質(zhì)心側(cè)偏角的變化速率,選取合適的控制參數(shù),λ>0,k3>0,k4>0,能保證系統(tǒng)誤差的一致有界性。控制律保證了系統(tǒng)是穩(wěn)定的,且狀態(tài)邊界為為了保證魯棒性和減少偏差[15],本控制律進(jìn)一步加入了抗飽和積分控制,具體控制律為

不難證明,設(shè)計(jì)的飽和控制參數(shù)滿(mǎn)足:

2.3 車(chē)輛航向角控制
針對(duì)航向角控制系統(tǒng):


其中 k5>該控制律保證了有 界,且 滿(mǎn) 足 邊 界 約 束另外,如果考慮李雅普諾夫函數(shù)其中 a>0,b>0,對(duì)其求導(dǎo)得



由上式可知,若參數(shù)滿(mǎn)足條件:k5>0,θ5>0,c1>,則加入控制器后的航向角系統(tǒng)為輸入狀態(tài)穩(wěn)定,保證誤差的一致有界性。滿(mǎn)足:

只要設(shè)計(jì)參數(shù)k5足夠大,偽控制輸入的跟蹤誤差對(duì)其影響就很弱,該系統(tǒng)對(duì)參考航向角的跟蹤就越準(zhǔn)確。同時(shí)新?tīng)顟B(tài)變量s可確保航向角誤差是有界的,最終狀態(tài)變量就收斂到如圖5所示的平行四邊形中。
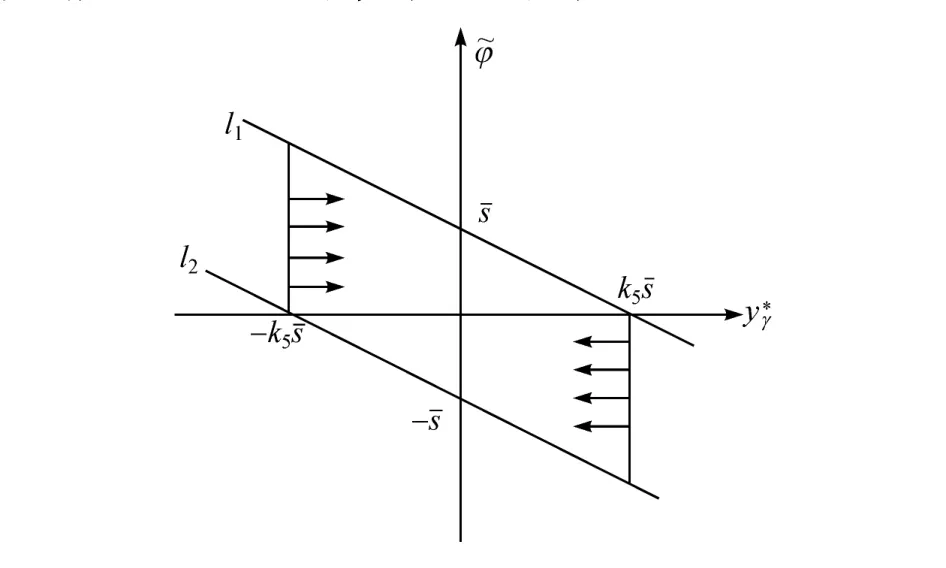
圖5 航向角控制結(jié)果
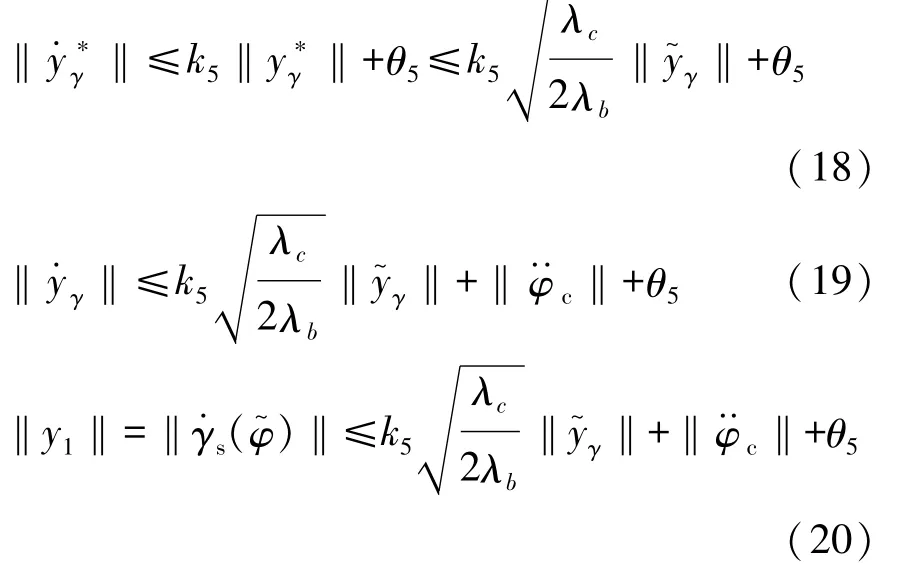
3 互聯(lián)穩(wěn)定性分析

圖6 互聯(lián)系統(tǒng)穩(wěn)定性分析
對(duì)于航向角子系統(tǒng),可得

綜上所述,本文中將SSUV的軌跡跟蹤問(wèn)題轉(zhuǎn)化為對(duì)目標(biāo)軌跡的平衡點(diǎn)鎮(zhèn)定問(wèn)題,通過(guò)變換系統(tǒng)誤差方程,采用反步法的設(shè)計(jì)思想,對(duì)車(chē)輛的橫擺運(yùn)動(dòng)控制和航向角跟蹤控制引入虛擬控制輸入,然后通過(guò)滑模控制手段和李雅普諾夫穩(wěn)定性分析,保證了系統(tǒng)狀態(tài)會(huì)收斂到運(yùn)動(dòng)學(xué)控制器給出的平衡點(diǎn),把時(shí)變信號(hào)作為平衡點(diǎn)的擾動(dòng)并證明控制系統(tǒng)的輸入狀態(tài)穩(wěn)定。
4 仿真結(jié)果
為驗(yàn)證控制效果,在仿真環(huán)境中分別設(shè)置蛇行路徑工況和變曲率圓周路徑工況,目標(biāo)航向角分別為,車(chē)輛目標(biāo)速度為20 m/s,初始條件:車(chē)速為 6 m/s,跟蹤誤差為 0,車(chē)輛側(cè)向速度和橫擺角速度均為0。圖7和圖8分別為變曲率圓周路徑跟蹤和蛇行路徑跟蹤的仿真結(jié)果。由圖可見(jiàn),車(chē)輛能很好地跟蹤給定路徑,對(duì)于曲率變化的情況也能迅速響應(yīng)并跟蹤,滿(mǎn)足路徑跟蹤需求。

圖7 變曲率路徑跟蹤仿真結(jié)果

圖8 蛇行路徑跟蹤仿真結(jié)果
當(dāng)車(chē)輛初始跟蹤誤差較大時(shí),為驗(yàn)證控制系統(tǒng)具有一定的魯棒性,必須驗(yàn)證車(chē)輛跟蹤目標(biāo)路徑的穩(wěn)定性。設(shè)置車(chē)輛具有較大初始位置誤差的變曲率圓周工況,目標(biāo)車(chē)速12m/s,車(chē)輛的初始位置誤差為(-5 m,5 m)。
由圖9可見(jiàn),運(yùn)動(dòng)控制系統(tǒng)能在較短時(shí)間內(nèi)保證車(chē)輛的狀態(tài)收斂至目標(biāo)軌跡。
通過(guò)上述仿真工況驗(yàn)證,能夠獲得如下結(jié)論:
(1)本文中設(shè)計(jì)的軌跡跟蹤控制器具備良好的跟蹤性能,即使動(dòng)力學(xué)控制器對(duì)于航向角的跟蹤存在一定的誤差,但只要誤差能保持在一定的范圍內(nèi),就不會(huì)影響到系統(tǒng)對(duì)路徑的跟蹤穩(wěn)定性,且跟蹤誤差能收斂到設(shè)計(jì)的邊界內(nèi);

圖9 較大初始誤差航向角跟蹤仿真結(jié)果
(2)該跟蹤控制器具有較大的吸引域,即使在車(chē)輛初始狀態(tài)處于較大偏差時(shí),仍可快速穩(wěn)定車(chē)輛并消除跟蹤誤差,使車(chē)輛跟蹤目標(biāo)軌跡;
(3)控制器對(duì)于直線(xiàn)、圓周和蛇行路徑都具有良好的跟蹤性能,且在低、高速或大側(cè)偏角工況下,都能使車(chē)輛穩(wěn)定跟蹤目標(biāo)軌跡,但隨著車(chē)速增加,車(chē)輛的振蕩過(guò)程和收斂時(shí)間會(huì)增加。
5 結(jié)論
針對(duì)差動(dòng)轉(zhuǎn)向無(wú)人車(chē)輛動(dòng)力學(xué)軌跡跟蹤問(wèn)題,分析了差動(dòng)轉(zhuǎn)向車(chē)輛欠驅(qū)動(dòng)系統(tǒng)的特點(diǎn)。在此基礎(chǔ)上,將動(dòng)力學(xué)軌跡跟蹤問(wèn)題轉(zhuǎn)變?yōu)檐?chē)輛瞬時(shí)平衡點(diǎn)鎮(zhèn)定問(wèn)題。相應(yīng)地,根據(jù)反步法設(shè)計(jì)方法,設(shè)計(jì)了利用積分抗飽和控制律的車(chē)輛速度控制、航向角跟蹤控制和橫擺運(yùn)動(dòng)控制算法。動(dòng)力學(xué)控制系統(tǒng)的互聯(lián)穩(wěn)定性保證了在滿(mǎn)足航向角1階導(dǎo)數(shù)為零或常數(shù)的條件下,車(chē)輛能快速、穩(wěn)定地跟蹤上期望軌跡。仿真結(jié)果表明,即使在高速大側(cè)向加速度工況和初始誤差較大的情況下,車(chē)輛仍然能跟蹤目標(biāo)軌跡,驗(yàn)證了算法的有效性。今后的進(jìn)一步工作將是對(duì)控制系統(tǒng)進(jìn)行實(shí)車(chē)試驗(yàn),以驗(yàn)證控制算法的有效性。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(xiāo)(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
