2.4 m跨聲速風洞流場預測自抗擾控制
2019-12-09 03:33:30劉為杰何帆凌忠偉
航空學報 2019年11期
劉為杰,何帆,凌忠偉
中國空氣動力研究與發展中心 高速空氣動力研究所,綿陽 621000
風洞流場的控制品質是影響風洞試驗數據質量和試驗效率的關鍵因素。風洞流場控制的主要對象是前室總壓和試驗段馬赫數,而為了滿足設備寬速域、高品質、低能耗的運行要求,大型暫沖式跨聲速風洞往往設計有多種流場調節手段,因此風洞流場實際上是一個典型的多進多出系統。在跨聲速條件下,氣流總壓和馬赫數存在關聯,具有強耦合性。風洞本身由于氣流管路較長,具有較大的時滯特性。風洞運行過程中會受到各種擾動,上流氣源的壓力降低、試驗過程中模型姿態改變也會引起系統控制特性的變化[1]。因此高品質的風洞流場控制技術具有一定的難度,對于更優化的流場控制方法的研究也在持續進行[2-5]。
中國空氣動力研究與發展中心的2.4 m跨聲速風洞(簡稱為2.4 m風洞)作為國內唯一的2 m量級大型跨聲速風洞,是中國先進飛行器研制不可或缺的重要地面模擬試驗平臺。早期,該風洞流場控制系統主要采用PID控制,并且針對總壓和馬赫數的耦合性設計了相應的解耦器[2]。近年來,傳統的PID控制已無法滿足某些型號試驗對風洞流場控制精度的高要求。為此,2.4 m風洞通過構建柵指、駐室流量調節閥、主排氣閥以及模型攻角擾動的階躍響應模型提出了前饋-反饋動態矩陣控制策略,提高了馬赫數控制精度[3],但是仍然存在2個問題:① 針對不同的型號試驗,需要重新通過試驗獲取攻角擾動的階躍響應模型,增加了吹風車次;② 動態矩陣控制參數較多,且參數之間存在復雜的關聯,不同參數的組合會極大地影響控制效果[6],因而給缺乏經驗的設計人員帶來了極大的困難和挑戰。
本文旨在設計一種參數調整簡單、具有較強抗擾能力的多變量控制系統,來實現2.4 m風洞試驗調節階段總壓和馬赫數的控制。為此,提出了自抗擾控制(Active Disturbance Rejection Control,ADRC)結合Smith預估器(Smith Predictor,SP)的控制方法,這里稱為預測自抗擾控制(SPADRC)。自抗擾控制器中的擴張狀態觀測器(Extended State Observer,ESO)能夠將總壓和馬赫數2個通道之間的耦合、系統的外部擾動以及系統內部參數的攝動視為總擾動估算出來,并補償到誤差反饋控制中,從而實現總壓和馬赫數的解耦控制,并且兼具良好的抗干擾能力。為了克服系統時滯,使用Smith預估器得到系統無時延輸出并將其反饋至擴張狀態觀測器,加快擴張狀態觀測器收斂速度,從而提高控制系統的動態性能。SPADRC的研究起步較晚,至今不到10年的時間,目前在振動控制[7]、伺服控制[8]以及過程控制[9]等領域都有成功的應用。
本文主要介紹了2.4 m風洞流場模型、預測自抗擾控制原理、2.4 m風洞流場控制系統的設計與仿真,最后對全文工作進行了總結。
1 2.4 m風洞流場模型
2.4 m風洞是中國空氣動力研究與發展中心的一座大尺寸空氣動力試驗設施,其馬赫數范圍為0.3~1.2,總壓范圍為(1.1~4.5)×105Pa。該風洞有2種典型的運轉方式:① 定攻角階梯變馬赫數或定馬赫數階梯變攻角;② 連續變攻角或連續變馬赫數。2.4 m風洞的運行過程分為充氣啟動和調節2個階段。啟動過程是指對風洞快速充壓以盡快達到穩定流場。調節過程的目標則是提高流場穩態精度和抗干擾能力[10],本文研究的內容是調節過程流場控制系統設計。在調節過程中,低馬赫數時(Ma≤0.85),2.4 m風洞通過主排氣閥和柵指來調節總壓和馬赫數;高馬赫數(Ma>0.85)時,該風洞則通過主排氣閥和駐室流量閥來調節總壓和馬赫數。文獻[2]給出了總壓和馬赫數的數學模型。
低馬赫數時,模型表達式為
(1)
式中:p0為穩定段總壓;Ma為試驗段馬赫數;u1為主排氣閥行程;u2為柵指伸出量;s為Laplace算子。
高馬赫數時,模型表達式為
(2)
式中:u1為主排氣閥行程;u3為駐室流量閥行程。從式(1)和式(2)可以看出,低馬赫數時,該系統交叉通道靜態增益為0,為弱耦合系統;高馬赫數時,該系統交叉通道靜態增益不再為0,為強耦合系統。耦合的不利影響主要表現為:調節馬赫數時會對總壓造成干擾,反之亦然。耦合越強,干擾越大,這樣會造成流場穩定時間變長,甚至是難以控制。此外,高馬赫數時系統存在非最小相位環節,非最小相位環節對系統動態性能影響很大[11],增加了控制器設計難度。
風洞在調節過程中攻角的變化造成試驗段堵塞度變化,從而會影響流場。文獻[3]指出,攻角會影響靜壓,而對總壓的影響可忽略不計,并且給出了攻角對靜壓的擾動模型:
1.86×10-2α2-8.06×10-4α3)
(3)
式中:Δps為靜壓變化量;α為攻角。而馬赫數的計算表達式為
(4)
式中:ps為靜壓。聯立式(3)和式(4)即可計算出攻角對馬赫數的擾動。這里需要指出的是本文在設計SPADRC控制系統時并不需要攻角對靜壓的擾動模型,該模型只用于仿真分析。
2 預測自抗擾控制原理
ADRC是韓京清基于PID控制技術并吸取現代控制理論成就,提出的一種不依賴被控對象精確模型的新型控制技術[12-13]。為了減少整定參數、便于工程應用,高志強等提出了線性ADRC[14-16]。目前ADRC在許多工程領域獲得了良好的控制效果[17-23]。下面簡要介紹ADRC原理。
考慮一個n階非線性、參數不確定系統:
(5)


(6)


(7)
式中:u0為誤差反饋控制量。將式(7)代入式(5),則原系統可轉化為串聯積分形式:
(8)
式(8)所表示的系統,可用如下簡單的控制器律進行控制,即
u0=k1(yd-z1)-k2z2-…-knzn
(9)
式中:yd為系統輸出期望值;k1,k2,…,kn為控制器的系數。文獻[14]采用帶寬的概念對L和k1,k2,…,kn進行整定,令ESO的帶寬為ωo,控制器的帶寬為ωc,則
(10)
(11)
式中:C為排列組合符號。因此,ADRC需要整定的參數有3個:b0、ωo和ωc。ADRC的結構十分簡單,當系統階數n為1時,其結構示意圖如圖1所示。當被控對象含有時滯環節,尤其時滯時間常數較大時,ADRC的穩定域將會減小。對于上述標準的ADRC而言,可增大b0或者減小ωo、ωc來使控制器穩定,但會犧牲系統的動態性能[24-25]。

圖1 ADRC結構示意圖Fig.1 Structure diagram of ADRC
Smith預估器常被用于時滯系統的控制,其結構示意圖見圖2,通過Smith預估器可以得到系統無時延輸出[26]。圖2中G(s)為被控對象非時滯環節,e-τs為被控對象的時滯環節,G1(s)為被控對象非時滯環節的估計,e-τ0s為被控對象時滯環節的估計,yp為系統的預測輸出。從圖2中可以看出,Smith預估器的預估效果嚴重依賴于被控對象的精確模型,這給工程實際應用帶來了一定的困難。

圖2 Smith預估器結構示意圖Fig.2 Structure diagram of Smith predictor
將Smith預估器的輸出反饋至ESO中,即構成SPADRC,如圖3所示。SPADRC綜合了ADRC的抗干擾能力以及Smith預估器的預估能力,一方面,降低了Smith預估器對被控對象精確模型的依賴程度,另一方面削弱了時滯對ADRC的不利影響。

圖3 一階SPADRC結構示意圖Fig.3 Structure diagram of SPADRC with first order
3 流場SPADRC控制系統設計
考慮兩輸入兩輸出(TITO)系統:
(12)
式中:u1和u2為系統輸入;y1和y2為系統輸出;b11、b12、b21、b22為系統參數;f1、f2為系統綜合擾動。將u2對y1的影響,u1對y2的影響看成擾動,則該TITO系統可改寫為
(13)
式中:f′1=f1+b12u2;f′2=f2+b21u1。設計2個分散的ESO將各自通道的擾動估計出來,然后分別在各自通道采用狀態反饋進行控制,即可將TITO系統解耦成2個單輸入單輸出(SISO)系統。


圖4 流場SPADRC控制系統結構示意圖Fig.4 Structure diagram of SPADRC control system for flow field
4 ESO收斂性和SPADRC抗擾特性分析
4.1 ESO收斂性分析
n取1,根據式(6)和式(10),可以計算出z1(t)和z2(t)的傳遞函數:
(14)
(15)
令ESO的跟蹤誤差e1(t)=y(t)-z1(t),e2(t)=f-z2(t),則其傳遞函數為
(17)
考慮典型性,y(t)和u(t)均取階躍信號,則e1(t)和e2(t)的穩態值為
(18)
(19)
式(18)和式(19)表明: ESO具有很好的收斂性,能夠實現系統狀態變量和總擾動的零靜差估計。
4.2 SPADRC抗擾特性分析
自抗擾控制的核心思想是通過估算并消除擾動,將被控對象近似轉化為串聯積分形式,轉換后的被控對象越接近串聯積分形式,則控制效果越好。根據式(6)、式(7)和式(10)可以推導出圖3中u0至yp的傳遞函數為
(20)
式中:
Gp=G(s)e-τs+(1-e-τ0s)G1(s)
(21)
以式(2)中總壓p0的傳遞函數為研究對象,并且不考慮耦合通道,即
(22)
ωo的值取7,繪制出Gu0yp的波特圖如圖5所示,圖中Δτ和ΔTi分別表示系統時滯時間常數和慣性時間常數相對各自標稱值的偏差。圖5中幅頻和相頻響應各有6條曲線,其中黑色曲線表示采用標準的ADRC,即無Smith預估補償時Gu0yp的幅頻和相頻響應曲線;其余5條曲線表示采用SPADRC,當被控對象模型中時滯時間常數和慣性時間常數存在不同偏差時Gu0yp的幅頻和相頻響應曲線。從圖中可以看出,采用ADRC,在頻率約小于1 rad/s時,可將Gu0yp近似轉換成串聯積分形式(傳遞函數為1/s);而采用SPADRC,若被控對象的模型精確已知,則在整個頻段范圍內都可將Gu0yp近似轉換為串聯積分形式,若被控對象的模型存在10%左右的偏差,則在頻率小于約3 rad/s時,仍可將Gu0yp近似轉換為串聯積分形式。由此可見,對于時滯系統,SPADRC能夠有效提高控制器的帶寬,削弱了時滯帶來的不利影響,同時對被控對象的建模誤差具有一定的抗擾能力。
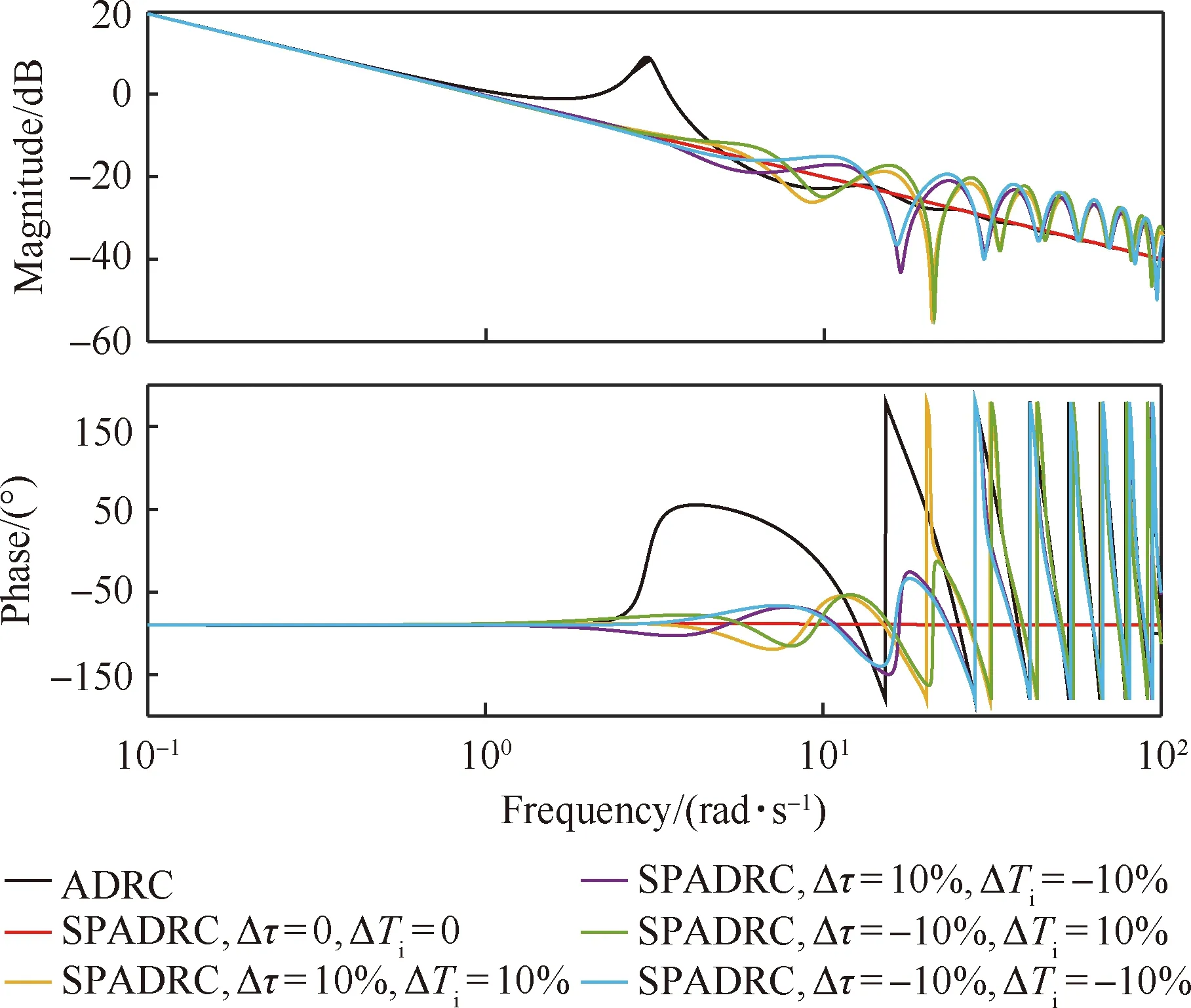
圖5 傳遞函數波特圖Fig.5 Transfer function baud diagram
5 仿真分析
在MATLAB/Simulink平臺上搭建仿真模型對所提出的流場SPADRC控制系統進行仿真分析。為了與傳統的流場控制方法進行對比,本文還設計了流場PI控制系統,這里對PI控制進行了改進,增加了Smith預估器以消除時滯影響。
在進行仿真之前需要設立2個前提條件:① 本文的研究內容是風洞調節過程流場的控制策略,因此假定仿真的初始時刻(0 s)風洞流場已經穩定(p0為200 kPa,Ma為0.9);② 控制系統的性能包含動態性能、穩態性能、抗干擾能力和解耦能力等多個方面,并受控制參數的影響。在對比分析2種控制算法時,需要設定一個基準,而本文選用動態性能作為基準。使用表1中的參數,使得SPADRC和PI的動態性能相接近。

表1 SPADRC和PI控制器參數Table 1 Parameters of SPADRC and PI controller
1) 設定值跟蹤
t=1 s,總壓設定值從200 kPa變為210 kPa,馬赫數的設定值保持不變,系統的輸出見圖6(a);t=1 s,馬赫數設定值從0.9變為1,總壓設定值保持不變,系統的輸出見圖6(b)。從圖6可以看出2種控制方法總壓和馬赫數的階躍響應曲線幾乎相同,但是SPADRC的解耦能力明顯優于PI。

圖6 階躍響應曲線Fig.6 Step response curves
2) 連續變馬赫數
保持總壓設定值不變,馬赫數設定值從0.9~1.2連續變化,變化率為0.25 s-1,系統輸出見圖7。可見,SPADRC和PI馬赫數跟蹤性能相同。而采用PI控制時,總壓波動達到0.5 kPa;采用SPADRC時,總壓波動小于0.1 kPa,進一步表明SPADRC較PI具有優良的解耦能力。

圖7 連續變馬赫數時系統輸出曲線Fig.7 System output curves when Mach number changes continuously
3) 階梯變馬赫數
保持總壓設定值不變,馬赫數設定值從0.9~1.2階梯變化,階梯值為0.1,間隔時間為4 s,系統輸出見圖8。與圖7類似,SPADRC和PI馬赫數跟蹤性能相同。而采用PI控制時,總壓波動約為0.7 kPa;采用SPADRC時,總壓波動小于0.2 kPa,同樣證明了SPADRC優良的解耦能力。

圖8 階梯變馬赫數時系統輸出曲線Fig.8 System output curves when Mach number changes by step way
4) 連續變攻角
保持馬赫數的設定值不變,攻角α從-10°~20°連續變化,變化率為2 (°)/s,馬赫數變化見圖9。SPADRC對應的馬赫數波動約為0.002,PI對應的馬赫數波動約為0.007,表明SPADRC的抗干擾能力明顯優于PI。
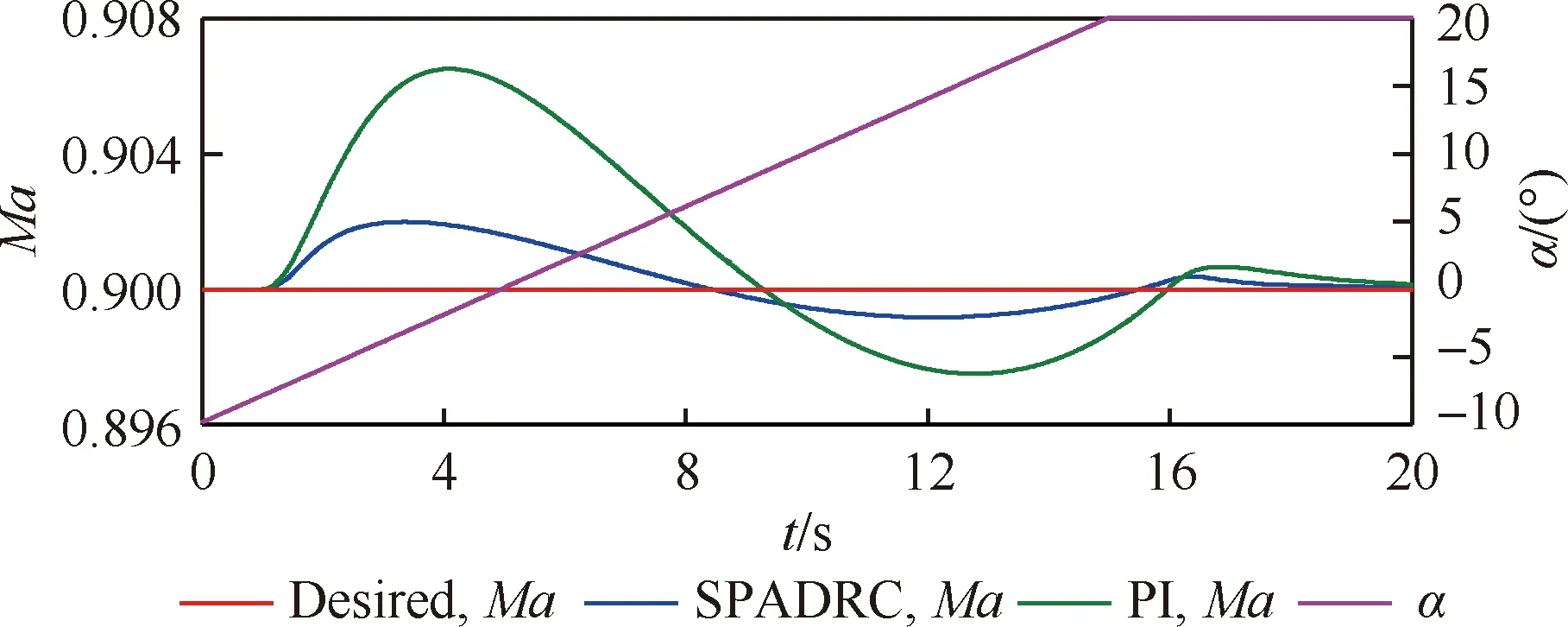
圖9 連續變攻角時馬赫數曲線Fig.9 Curves of Mach number when angle of attack changes continuously
5) 階梯變攻角
保持馬赫數的設定值不變,攻角從-10°~20°階梯變化,階梯值為2°,間隔時間為1 s,馬赫數變化見圖10。類似地,SPADRC對應的馬赫數波動約為0.002,PI對應的馬赫數波動約為0.007,同樣證明了SPADRC的抗干擾能力明顯優于PI。
6) 魯棒性測試試驗
將被控對象的時滯時間和慣性時間常數在各自標稱值的基礎上分別提高10%和降低10%,組合成4種情形,記錄SPADRC輸出曲線,并與標稱值下SPADRC和PI輸出曲線進行對比,如圖11所示。可以看出在系統參數攝動時,SPADRC階躍響應曲線基本保持不變,解耦能力略有變化,但是仍遠優于PI,SPADRC表現出優良的魯棒性。

圖10 階梯變攻角時馬赫數曲線Fig.10 Curves of Mach number when angle of attack changes by step way
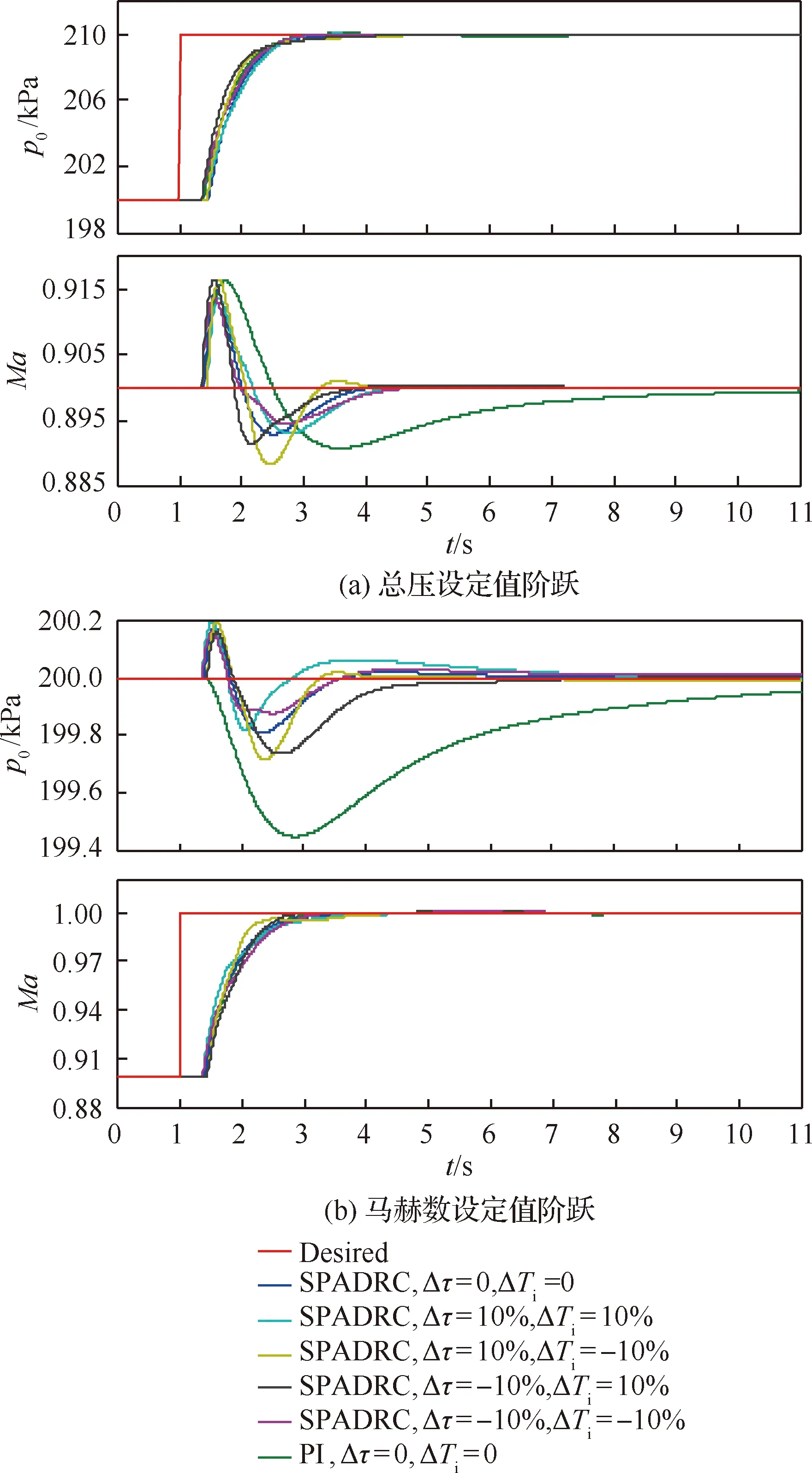
圖11 魯棒性測試系統輸出曲線Fig.11 System output curves of robust test
6 結 論
1) 本文將SPADRC控制方法引入2.4 m風洞流場控制系統中,該方法無需額外設計解耦器,通過ESO將總壓和馬赫數2個通道之間的耦合以及其他擾動估計出來并補償到誤差反饋控制中,即可實現總壓和馬赫數的解耦控制。
2) 仿真研究中,對總壓和馬赫數2個回路分別做了設定值跟蹤試驗和魯棒性能試驗,并對2.4 m風洞2種典型的運行方式進行仿真,同時與PI控制器作了對比。結果表明SPADRC具有良好的解耦能力、抗干擾能力,魯棒性強,不依賴系統精確模型,參數整定簡單方便。
本文后續將在2.4 m風洞開展SPADRC流場控制算法試驗研究,對該控制方法的性能進行進一步驗證。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19