無人機高光譜載荷性能交叉驗證
2019-12-14 01:12:54田文忠趙慶展胡浩偉李沛婷馬永建
中國測試 2019年11期
田文忠,趙慶展,胡浩偉,李沛婷,馬永建,龍 翔
(1.石河子大學機械電氣工程學院,新疆 石河子 832000;2.國家遙感中心新疆兵團分部,新疆 石河子 832000;3.兵團空間信息工程技術研究中心,新疆 石河子 832000;4.兵團空間信息工程實驗室,新疆 石河子 832000;5.石河子大學信息科學與技術學院,新疆 石河子 832000)
0 引 言
隨著無人機(unmanned aerial vehicle,UAV)技術和輕型多、高光譜相機的發展,以無人機為飛行平臺可獲得高空間分辨率、高光譜分辨率和高時間分辨率的遙感影像[1],無人機具有起降靈活、低空飛行、低成本、易維護[2]等優勢,使得無人機遙感在國土測繪[3]、環境災害[4]、農情監測[5-6]等方面得到廣泛應用。在無人機遙感影像的實際應用中,定量遙感已成為遙感學科發展的前沿與趨勢[7]。對于定量遙感,首先需要確保無人機載荷性能的可靠性,這要求在做定量應用研究之前,需要對儀器性能進行驗證研究。而定量遙感基礎就是遙感數據的輻射定標[8]。輻射定標即建立空間相機入瞳處輻射量與探測器輸出量的數值之間關系的過程[9]。
根據遙感載荷輻射定標原理,陳洪耀等[10]和勾志陽等[11]采用反射率基法[12]。結合靶標場灰階靶標實現對無人機平臺上的多、高光譜相機場地絕對輻射定標及驗證分析;但并未有相關交叉驗證研究。首先,由于高光譜儀波段較多,波段的光譜分辨率較高,使得在實際研究中很難找到對其進行交叉驗證的高光譜參考載荷。其次,如果利用多光譜載荷對其進行性能參數準確性驗證,以有限的地面參考點信息是很難得到幾十甚至上百個波段的驗證系數的,并且方程本身是個病態問題。基于此問題,國內學者李傳榮等[13]采用2010年資源應用衛星中心公布的HJ-1B/CCD1多光譜數據和無人機高光譜數據進行交叉驗證研究,得到的定標差異系數未超過10%,在一定程度上說明了此交叉驗證方法的可行性。同時,由于二者之間的光譜差異、空間相差較大、大氣路徑不同以及采集時間的不同,使得利用高光譜數據模擬得到的HJ-1B/CCD1多光譜各波段的入瞳輻亮度和真實值存在差異,選取地物時無法保證目標場景完全相同,以及真實大氣環境差異,從而造成驗證具有一定的不可靠性。
基于此類研究方法,本文利用無人機Rikola高光譜載荷高光譜分辨率、高空間分辨率及波段可選則的特點,展開與無人機MCA12s多光譜載荷的交叉驗證研究,并結合灰階靶標,使用Rikola高光譜載荷輻亮度數據對MCA12s多光譜載荷進行輻射定標,建立高光譜輻亮度值與多光譜DN值之間關系,從而實現高光譜載荷與多光譜載荷交叉驗證研究,并從側面反映Rikola高光譜載荷的光譜和輻射綜合性能。
1 實驗設備與數據獲取
1.1 實驗設備
如圖1所示,在交叉驗證實驗中,所使用的無人機平臺為兩架同型號大疆經緯M600 Pro無人機,配合大疆如影MX云臺,使得光譜儀平穩地搭載在無人機上,兩架無人機執行DJI GS Pro軟件中規劃的同一航線任務。驗證載荷是芬蘭SENOP公司生產的Rikola高光譜成像儀,質量約為720 g,適合搭載在小型無人機,成像方式為框幅式成像,視場角 36.5°,焦距 9 mm,圖像分辨率為 1 010×1 010,波段范圍為 450~950 nm,波段數范圍為 0~380 個,用于機載時可設波段60~70個。此次交叉驗證所使用的待驗證載荷是美國Tetracam公司生產的MCA12s多光譜成像儀,質量輕、體積小、可遠程觸發,適合在中小型無人機上進行搭載。每個波段配備 1.2 兆像素 CMOS 傳感器 (6.18 mm×4.95 mm),光圈 f3.2,焦距 9.6 mm,圖像分辨率為 1 280×1 024,可進行12波段(可自由選配)影像數據獲取[14]。另外,該光譜儀各通道對應的光譜響應函數由廠家提供。實驗所用的5塊灰階靶標其中4塊是由美國G8T廠家生產的標準漫反射參考板組成,反射率分別為3%、22%、48%、64%,大小為 1.2 m×1.2 m;另外一塊是由高光譜儀廠家定制的0.5 m×0.5 m大小的100%高光譜性能漫反射板。
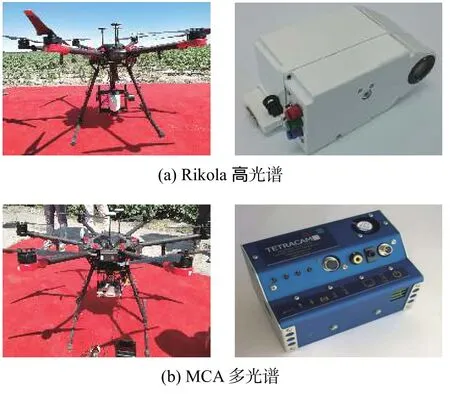
圖1 大疆M600無人機搭載高、多光譜載荷圖
1.2 數據獲取與處理
本次交叉驗證實驗在新疆塔城地區沙灣縣蘑菇胡村進行,其東經為 44.413 348 06°,北緯為85.894 768 06°。該區域地表主要有裸土和葫蘆瓜、棉花等農作物。灰階靶標鋪設在葫蘆瓜和棉花之間的裸土上。無人機為自動巡航模式進行航拍,航高80 m,高光譜載荷和多光譜載荷分別實現數據采集的時間是2018年8月8日12時30分和2018年8月8日12時50分。
在交叉驗證研究時,只選取靶標及地物在內的一景影像進行研究,對于MCA12s多光譜數據,利用Tetracam PixelWrench2軟件[15]將原始文件轉化成標準tif格式文件。對于Rikola高光譜數據首先進行格式轉換和暗電流矯正與校準,由于高光譜影像波段較多,相機觸發曝光后,在設定的波段序列下拍攝連續影像,得到的光譜立方體影像并不完全重疊,因此進行波段配準處理。
2 波段選擇與交叉驗證方法
2.1 波段參數選取
Rikola高光譜儀傳感器光譜范圍為503~911 nm,并且可對其波長在此范圍內進行特定波段選擇。對于MCA12s多光譜儀固有的12個波長,Rikola高光譜儀可選取的波長分別為 515,550,610,656,710,760,800,830,860,900 nm。另外,由于多光譜儀前10個波段對應半高波寬FWHM為10 nm,通過表1中FWHM對比,高光譜儀選擇比較接近的寬波段模式,且在本次實驗中,在不考慮大氣對寬波段和窄波段的影響,從表1可看出,波寬差異不大,故忽略二者之間的光譜差異。兩次數據采集過程中,相隔時間不超過30 min,其觀測時間,太陽天頂角,觀測天頂角非常相近,可以認為大氣在時間和觀察角度上的差異很小。
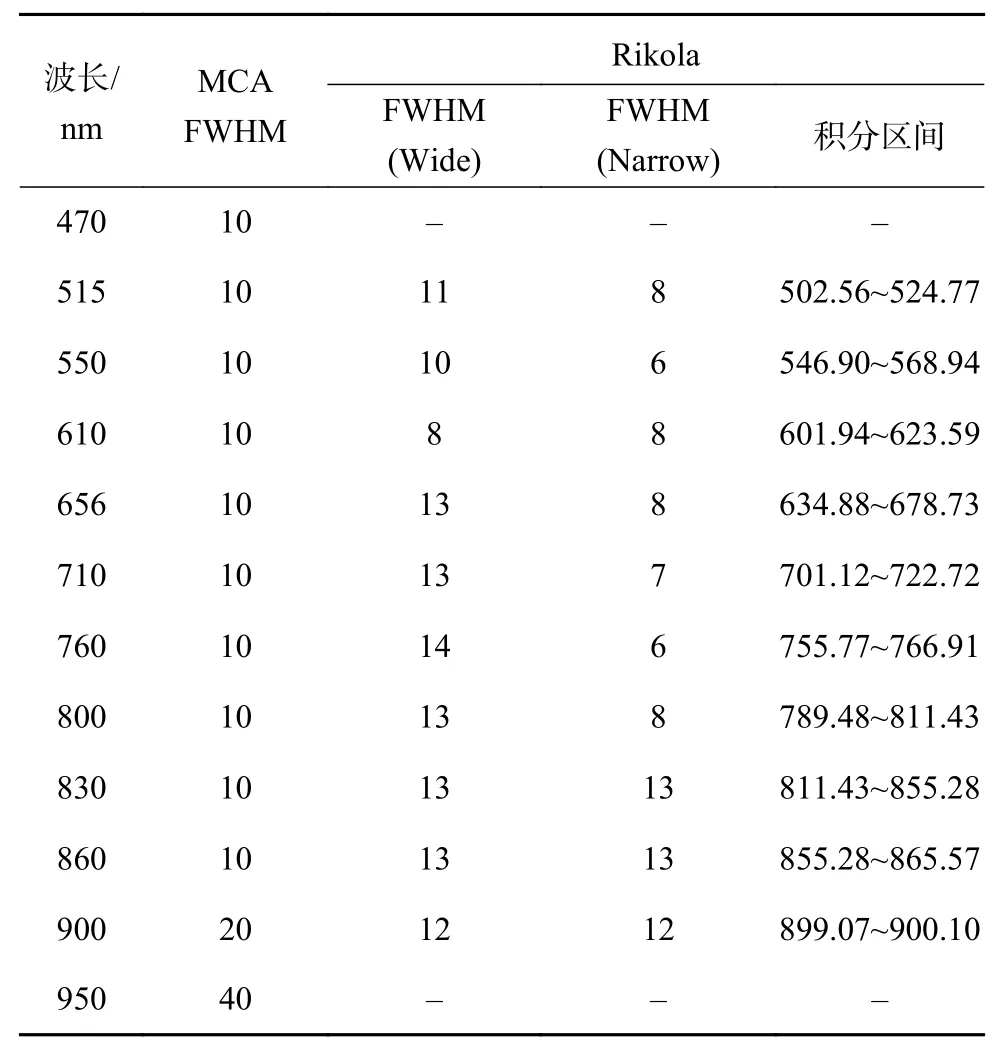
表1 多光譜波段對應的高光譜波段FWHM和積分區間
根據MCA12s多光譜儀和Rikola高光譜儀各波段的光譜范圍,確定用于卷積運算的光譜范圍,如表1所示。
2.2 交叉驗證方法
無人機高光譜載荷交叉驗證流程如圖2所示。
通過大疆經緯M600 Pro無人機搭載Rikola高光譜和MCA12s多光譜載荷進行數據采集,選取Rikola高光譜影像中5塊漫反射板的輻亮度數據,利用卷積[16-17]方法,計算得到MCA12s多光譜儀各波段的等效入瞳輻亮度模擬值,其卷積公式為
式中:LM——MCA12s多光譜儀某波段等效入瞳輻亮度值;
fM——MCA12s多光譜儀在該波段的光譜響應函數;
LR(i)——Rikola高光譜儀第i波段的入瞳輻亮度值。
選取多光譜影像灰階靶標的數字量化值(DN)與模擬得到的等效入瞳輻亮度值(L)進行最小二乘法擬合,得到遙感圖像DN值與瞳輻亮度值之間關系曲線,從而確定多光譜載荷輻射定標增益系數[18]。最后通過對定標結果平均相對誤差分析,光譜曲線對比等試驗從而完成無人機高光譜載荷交叉驗證研究。
3 結果與分析
3.1 多光譜入瞳輻亮度計算
根據Rikola高光譜遙感影像,可分別得到無人機高光譜影像中5塊灰階靶標的入瞳輻亮度,并與MCA12s多光譜儀的光譜響應函數進行卷積運算,得到MCA12s多光譜儀各波段的等效入瞳輻亮度模擬值。計算結果如表2所示。
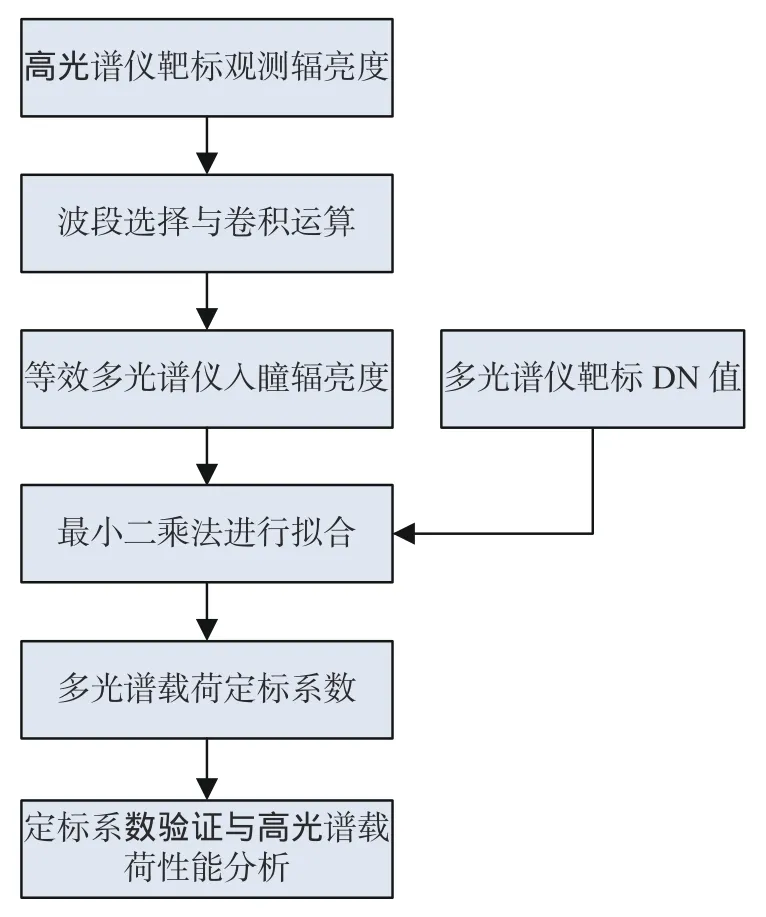
圖2 無人機高光譜載荷性能交叉驗證流程圖
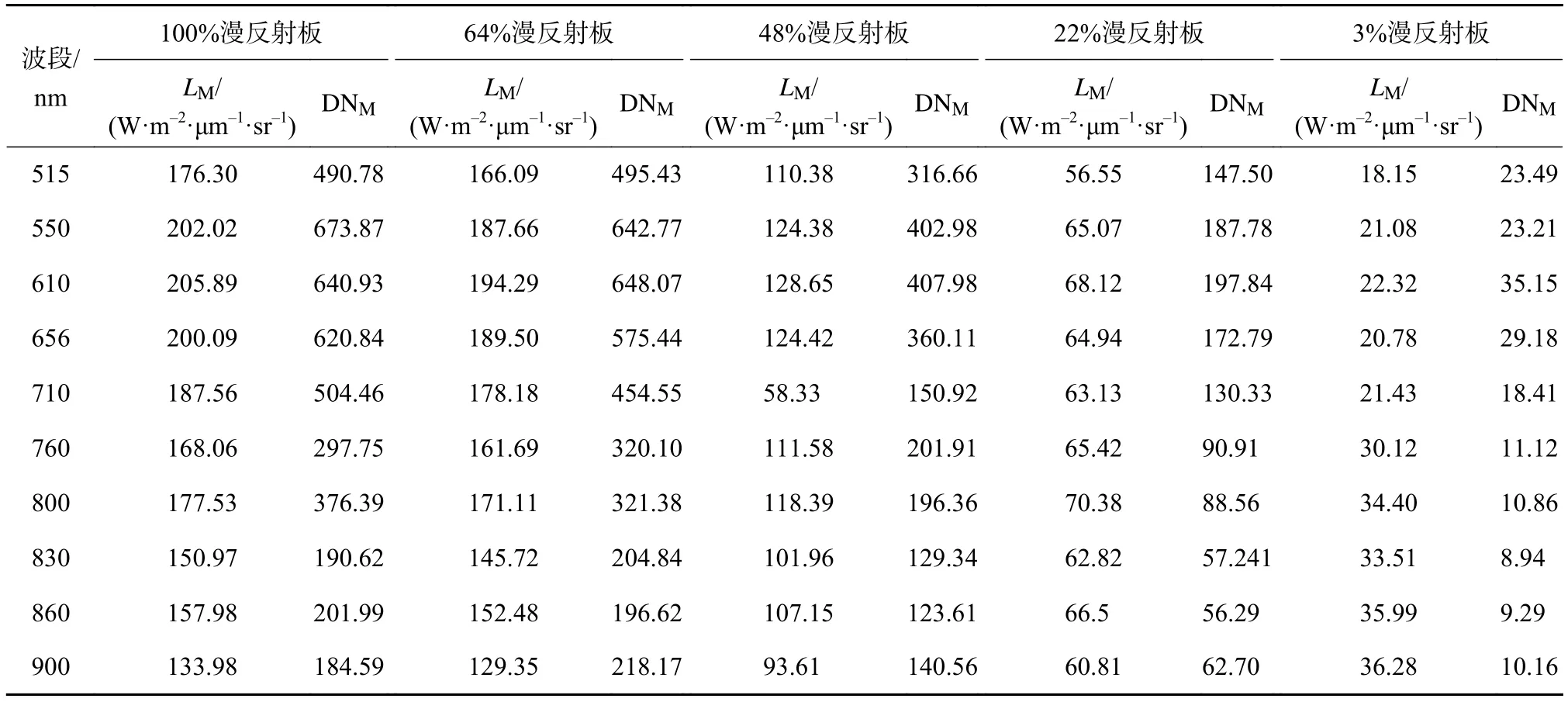
表2 MCA12s多光譜儀各波段入瞳輻亮度模擬值1)
3.2 輻射定標增益系數確定
機載成像光譜儀入瞳處各光譜帶的輻射亮度值(L)與光譜儀輸出的數字量化值(DN)之間的數值關系[19]表達式為

其中a為 定標增益系數,b為偏置。
根據定標方程,將模擬得到的MCA12s多光譜儀各波段入瞳輻亮度值與灰階靶標對應的DN值采用最小二乘法進行擬合,從而獲得機載MCA12s多光譜儀輻射定標系數,結果如表3所示。
表3定標結果初步可確定,在MCA12s多光譜儀獲取影像的10個通道中,在地面鋪設靶標從3% ~100%反射率范圍內,傳感器線性響應度較高。
3.3 定標系數驗證與分析
如圖3所示,實驗時首先在葫蘆瓜、棉花和裸土3種地物相對均勻的區域利用GPS定位進行采樣打點。由于在80 m航高時,Rikola高光譜儀地面分辨率為5.2 cm,MCA12s多光譜儀地面分辨率為6 cm,二者分辨率相差很小,故在影像中,以采樣點為中心選取100像元×100像元,但由于裸土區域相對較窄,選擇30像元×30像元。

表3 MCA12s多光譜儀定標系數a 、偏置b 及擬合相關系數r2
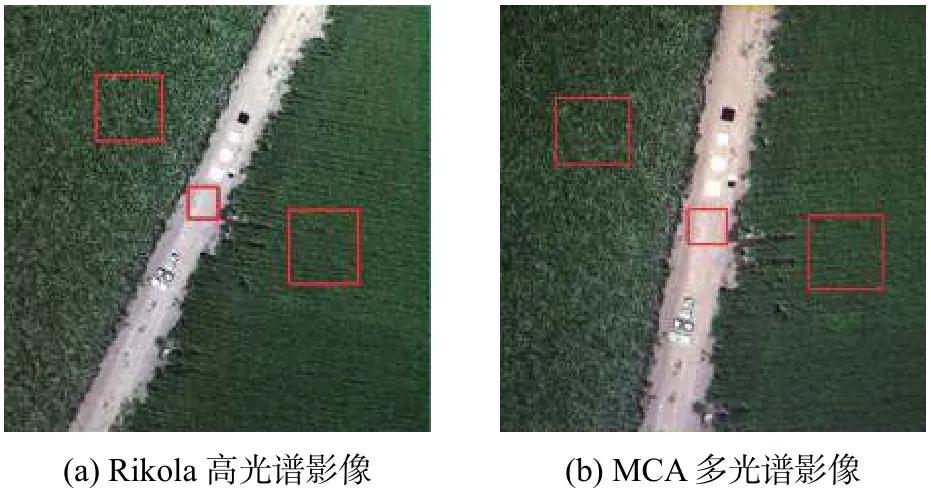
圖3 影像中研究數據塊選取圖(從左到右依次是葫蘆瓜、裸土、棉花)
3.3.1 定標后平均相對誤差 (MRE)分析
根據MCA12s多光譜影像所選區域實際DN值,與定標所得的DN值,計算平均相對誤差(MRE),并作為本實驗定標系數精度評價指標。其計算公式為
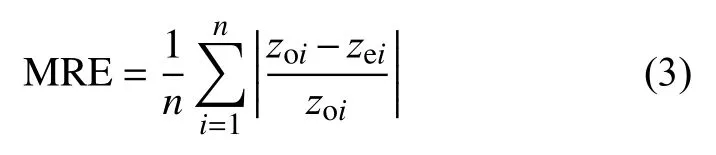
其中zoi、zei分別為所選區域實際DN值和定標所得的DN值,n為某一驗證波段的采樣點數。
從圖4各波段對應的平均相對誤差(MRE)結果可初步確定,對于相對比較均勻的裸土,其平均相對誤差小于0.12,90%的波段平均相對誤差都低于0.08。可以說明實驗所得的定標方程相對比較準確,基本能實現MCA12s多光譜所得的DN值和輻能量之間的轉換。對于植被區葫蘆瓜和棉花,平均相對誤差小于0.32,平均相對誤差較大的波段主要在515 nm和656 nm處,結合當時實驗狀況,葫蘆瓜部分葉子有干枯現象,棉花正處于開花期,可能造成較大差異與均勻地物有關,而對于植被光譜而言,350 nm 到 490 nm 為葉綠素強吸收帶,550 nm波長附近是葉綠素強反射峰區,650 nm到700 nm為葉綠素強吸收帶,700 nm 到 1 300 nm 植被具有強反射特征[20],但具體歸屬于哪一個原因及其中的定量關系,還有待驗證。
3.3.2 引入地物后再次線性回歸后的定標系數對比
根據MCA12s多光譜影像所選地物和靶標的DN值,及Rikola高光譜影像所選地物和靶標的輻亮度值,按照3.1節多光譜入瞳輻亮度計算方法和3.2節輻射定標增益系數確定方法,可得到引入地物葫蘆瓜、棉花、裸土后進行線性擬合后的定標結果,其定標結果如圖5所示。
如表4所示,兩次交叉驗證定標系數相對差異在±1%之內,且兩次擬合相關系數r2分別在0.96和0.92以上。通過比較僅由灰階靶標擬合得到的定標增益系數和葫蘆瓜、棉花、裸土、灰階靶標擬合得到的定標增益系數之間的相對差異,可以看出,加入相對均勻的地物進行定標是可行的,由于兩次擬合所得的定標系數相對穩定,說明該定標結果可靠,另一方面說明了利用Rikola高光譜載荷對MCA12s多光譜儀進行定標是可行的,可實現交叉驗證,由此也說明了Rikola高光譜儀性能參數的準確性。
3.3.3 影像定標矯正后反射率曲線對比分析
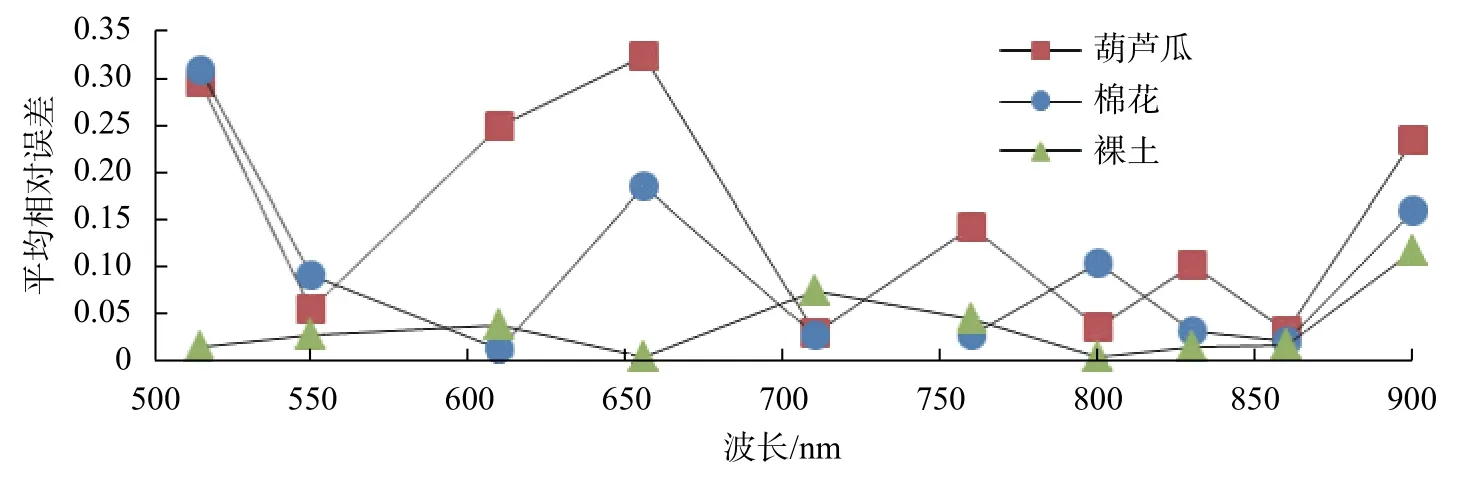
圖4 葫蘆瓜、棉花、裸土平均相對誤差(MRE)
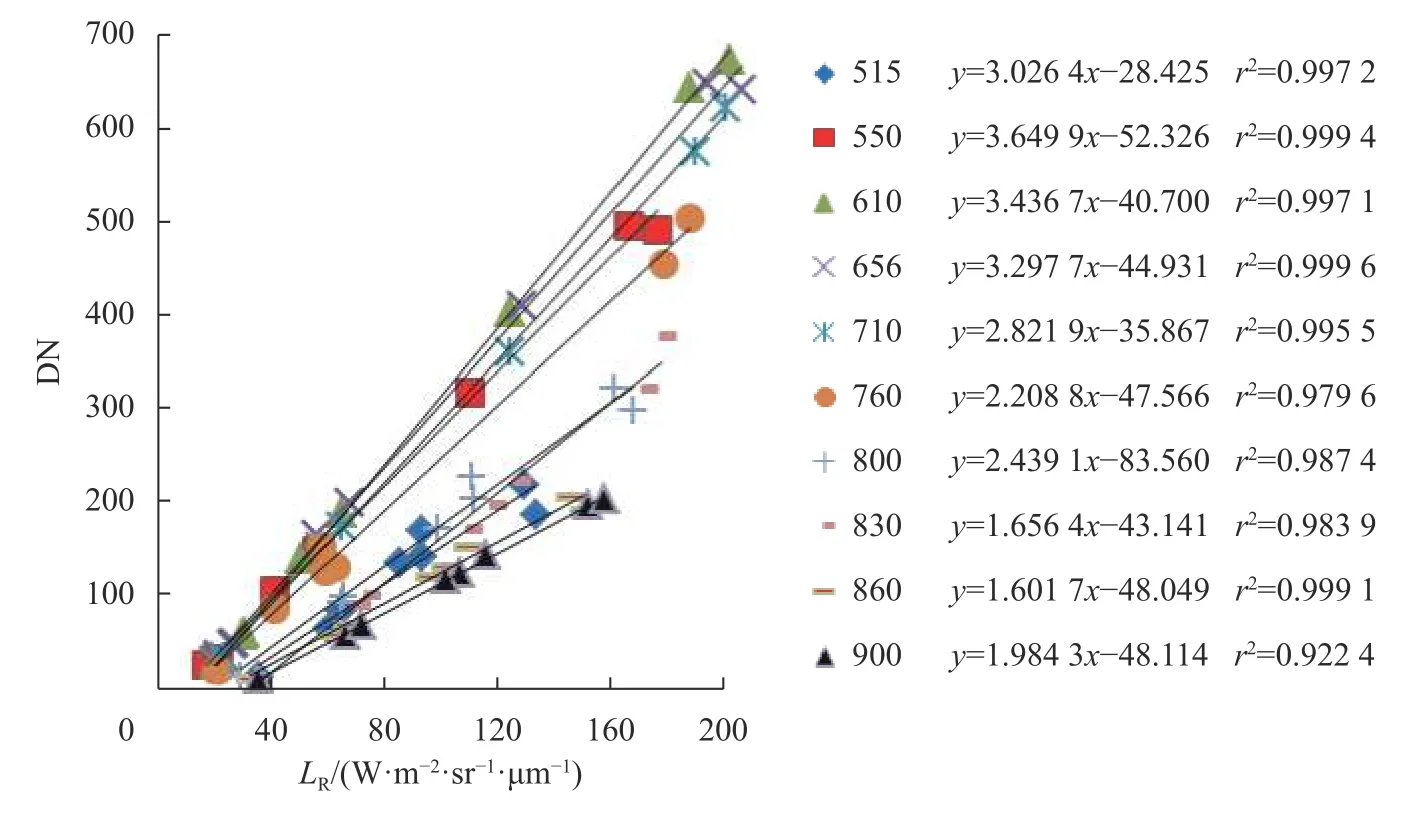
圖5 葫蘆瓜、棉花、裸土、灰階靶標線性擬合所得定標系數

表4 兩次交叉驗證定標系數相對差異
在影像定標矯正后反射率曲線對比分析中,首先使用48%標準漫反射板及廠家提供的實驗室定標反射率值,將定標后的MCA12s多光譜輻亮度數據和Rikola高光譜輻亮度數據轉換成反射率值。得到的灰階靶標的反射率曲線如圖6所示,對MCA12s多光譜數據和Rikola高光譜數據所得的靶標曲線整體趨勢而言,靶標曲線趨勢基本一致。對于100%漫反射板,MCA12s多光譜數據得到的反射率數據在750 nm處有較大的波動。22%漫反射板基本趨于正常;100%漫反射板得到的反射率相對較低,且反射率均未有達到100%;對于64%和3%漫反射板得到的反射率相對較高。這與實驗所處環境,曝光設置及傳感器響應范圍有關,但二者曲線趨勢基本一致,因此所得定標結果可靠,Rikola高光譜儀性能參數的準確性得到檢驗。
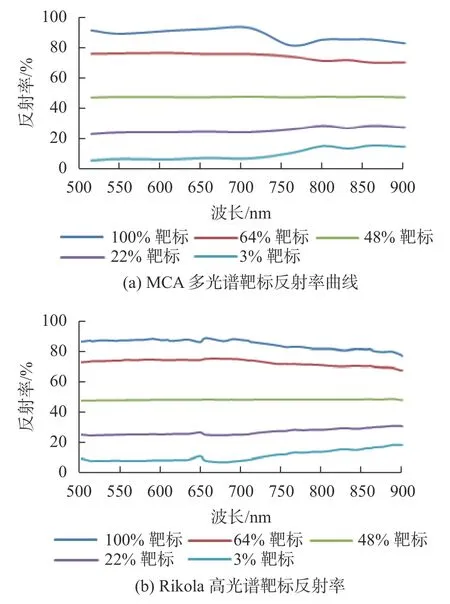
圖6 靶標反射率曲線
4 結束語
本次交叉驗證研究基于輻射定標原理,利用灰階靶標,通過無人機Rikola高光譜載荷輻亮度數據與MCA12s多光譜載荷光譜響應函數的卷積運算,得到MCA12s多光譜載荷的等效輻亮度,并與MCA12s多光譜載荷DN值線性擬合。得到無人機載MCA12s多光譜儀輻射定標系數。通過對定標后結果的平均相對誤差(MRE)分析,引入地物類型后再次線性回歸后定標系數對比分析以及影像定標矯正后反射率曲線對比分析得到以下結論:
1) 利用灰階靶標對MCA12s多光譜載荷定標,其定標后所得的DN值與MCA12s多光譜載荷影像的平均相對誤差可以看出:選擇比較均勻的裸土進行檢驗,平均相對誤差小于0.12,驗證了本文中定標結果的有效性和交叉驗證實驗的可行性。
2) 引入葫蘆瓜、棉花和裸土,再次線性回歸后定標系數對比,定標系數相對差異在±1%之內,且兩次擬合相關系數r2分別在0.96和0.92以上。一方面檢驗了傳感器線性響應性能和在本次交叉驗證實驗中擬合的定標方程的可靠性,另一方面說明了利用均勻地物在交叉驗證研究中的普適性,并對Rikola高光譜儀性能得到初步驗證。
3) 從影像定標矯正后漫反射反射率曲線可以看出,二者曲線趨勢基本一致,因此所得定標結果可靠,Rikola高光譜儀性能參數的準確性進一步得到檢驗。
本文基于不同反射率的灰階靶標,MCA12s多光譜載荷,對無人機Rikola高光譜載荷性能進行了初步的檢驗研究。但有一些問題還需在未來的研究中改進,如雖然兩次無人機執行任務時間間隔比較短,但對本次實驗的定標也有可能產生一定影響。可對設備進行改進設計,在大疆經緯M600 Pro無人機上同時搭載高光譜和多光譜載荷。另外,可對載荷結合特定地物及特征波段進行具體分析,找到新的交叉驗證方法。
