基于紅外測距傳感器的倒車雷達電路板設計
2019-12-16 08:16:37王麗博王慶平
農機使用與維修 2019年10期
王麗博 王慶平


摘 要:介紹了一種基于紅外測距傳感器的倒車雷達電路板,該電路板使用紅外發射管和紅外接收管作為傳感器件,測距進行分段顯示。紅外測距倒車電路板具有電路結構簡單、性價比高、電路工作穩定的特點,可應用于傳感器教學課堂、學生電子組裝調試學習及各種測距效果演示等場合。
關鍵詞:紅外測距;傳感器;倒車雷達;電路板設計
中圖分類號:TN219文獻標識碼:A
doi:10.14031/j.cnki.njwx.2019.10.008
0 引言
隨著傳感器技術快速發展,傳感器的應用領域迅猛擴大,其中紅外傳感器測距的應用案例也越來越多。紅外測距傳感器具有一對紅外信號發射與接收二極管,光線照射到物體后產生反射現象,發射光會反射到接收管,接收管將光能轉換為電能,對電能進行處理,計算分析物體距離。本文設計的基于紅外傳感器的倒車雷達電路板,可以較好地反應出障礙物與電路板之間的距離,并通過三個不同顏色的發光二極管指示距離(測試距離為:10~30 cm)。
1 系統硬件設計
1.1 紅外雷達倒車電路板制作方案
汽車開始倒車時,紅外傳感器時刻檢測周圍障礙物距離情況,如果在檢測范圍內有障礙物,則進行指示燈報警。紅外倒車雷達電路板主要由多諧振蕩電路、紅外信號發射與接收電路、紅外信號放大及電壓比較電路、指示燈顯示電路構成。
發射電路主要使用功能是將電能轉換成近紅外光并向外進行輻射,紅外接收電路可將紅外光轉換成電信號。當汽車倒車時,紅外傳感器件檢測汽車后方是否有障礙物,并將障礙物的距離進行指示。紅外倒車雷達測距系統組成如圖1所示。
紅外測距倒車系統主要由發射、接收、處理、顯示4個模塊構成,電路的核心元件包括NE555和運放LM324。
NE555為8腳集成器件,集成了模擬電路和數字電路,它具有體積小巧、穩定可靠、電源范圍寬、適用范圍廣等特點,外部電路配合少量的電阻、電容即可組成單穩態觸發器和多諧振蕩器,完成特定的振蕩延時作用。故經常使用NE555器件用于產生脈沖波形及波形變換。
LM324屬于表面貼裝型元器件,是一個四路運算放大器,每一個運算放大器都有5個引出腳,其中兩個是信號輸入引腳。該運算放大器具有差分輸入功能,其工作電壓為:3~32 V。
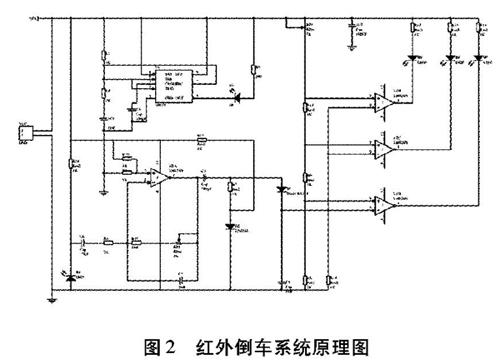
紅外測距倒車系統原理結構如圖2所示。
發射電路:NE555及周圍元件組成多諧振蕩器,產生紅外波信號,經U1第3腳輸出并驅動紅外發射管HF發射紅外信號。
接收電路:紅外發射管發射的紅外信號經前方障礙物反射后由紅外接收管HJ接收,并送至U2A及周圍元件組成的放大電路進行信號放大。
信號處理電路:LM324主要用來放大紅外接收信號和構成電壓比較器電路。放大后的紅外接收信號經U2A的第1引腳輸出,信號經C3、D1和C2的耦合整流濾波后送至U2B、U2C 、U2D的反相輸入端,反相輸入端電壓分別與對應的同相輸入端電壓進行比較,當同相輸入端電壓低于反相輸入端電壓時,運算器輸出為低電平,從而使得與其連接的發光二極管導通,即LED燈亮。
顯示電路:使用三個發光二極管用來指示倒車距離范圍。根據LM324電壓比較后的結果實現LED5、LED6、LED7三盞指示燈亮滅情況,三盞燈配合指示距離遠近的效果。
2 電路調試
安裝電路板之前要對所有元器件進行檢查,確保所有器件均能正常工作。焊接電路板時,可以使用兩根引線直接焊接在PCB的電源和地線上,以便后期調試。
紅外倒車雷達電路板采用分步調試的方法。首先,按照原理圖檢查線路中各個元器件之間的連接關系是否無誤,焊接中是否存在漏焊、虛焊、短路等問題。如果線路無問題后就開始進行功能電路檢查。
接入9 V工作電壓(注意電壓正負極不要接反),開始發射電路功能調試。使用示波器觀測NE555集成塊的輸出端(第3引腳)是否有方波信號輸出。同時,用萬用表測試紅外發射管的工作是否正常,觀測其兩端是否有輸出電壓即可。發射電路功能調試完成后,開始對發射電路進行功能調試。
最后,進行整體調試。用物體遮擋紅外光發光管,理論上講此時紅外接收管應該可以接收到反射的紅外光信號,即車距指示燈LED5、LED6、LED7會亮,但是如果不亮,考慮距離問題,上下調整障礙物距離,同時需要檢測振蕩電路,使用示波器觀察NE555集成塊的輸出端的輸出波形是否正確,然后用萬用表排查元器件的焊接情況,排查故障修復好后重新調試,確定沒有問題后,可以緩慢調節兩個滑動變阻器RP1和 RP2,使兩個可調電位器相互配合,最終調整出一個較為合適的阻值,滿足障礙物距紅外倒車測距電路板30 cm時LED5燈亮,20 cm時LED5、LED6燈亮,10 cm時三盞燈全亮。
3 電路板測試及測試結果
隨著障礙物距離越來越近,指示燈個數增加,30 cm時一盞燈亮,20 cm時兩盞燈亮,10 cm時三盞燈亮。使用一張白紙進行測距調試,調試效果如下圖3所示。
該紅外測距倒車電路板使用兩個可調電位器RP1和 RP2。其中RP1調節反射距離,RP2調節靈敏度,測試前調節兩個電位器,相互配合下可以嘗試距離30 cm時LED5亮,距離20 cm時LED5和LED6亮,距離10 cm時三盞燈全亮。
4 總結
通過測試,該紅外測距倒車電路板可以在電源供電條件下實現障礙物測距功能,并且隨著障礙物距離的改變,指示燈亮的數目也隨著改變,距離越近時,發光二極管亮得越多。障礙物在安全測距范圍外時,指示燈均不亮,滿足汽車倒車指示要求。
(05)