基于ARM的采摘機械手運動控制及避障研究
2019-12-22 05:50:38王立謙
農機化研究 2019年2期
關鍵詞:系統
王立謙,吳 蕾
(武昌首義學院 機電與自動化學院,武漢 430064)
0 引言
近年來,隨著人工智能技術的日益成熟,我國不斷結合新技術推動農業機械化的發展,致力于減小與發達國家在農業現代化方面的差距。隨著農業機械化的不斷被重視和飛速發展,各種農業機器人逐漸進入市場,不僅改變了傳統的農業勞動方式,而且促進了現代農業的發展。本文對采摘機械手進行了位姿描述和運動學分析,并對機械手運動控制和避障進行了一定的前期理論研究,對設計出具有人工智能的采摘機器人具有一定的參考意義。
1 機械手運動學分析
機械手是采摘機器人的重要組成部分,是保證在復雜環境中開展整個采摘作業的綜合性剛體。采摘機械手包含多個可自動運動的關節,各關節都在其坐標系度量下進行運動,為果實的成功抓取提供了基礎。因此,在對采摘機械手運動控制及避障進行研究之前,必須提前對機械手位移、速度和加速度等運動學原理進行分析和研究。
圖1中,建立原點位于參考坐標系XYZ原點的向量圖,則該參考坐標系XYZ可以用3個向量組成的矩陣進行表示,其位姿描述方程式為
(1)
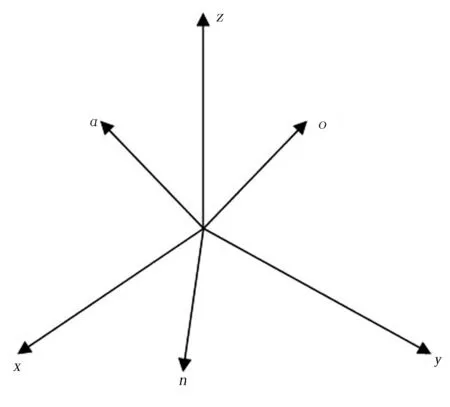
圖1 原點位于參考坐標系原點的向量表示圖
倘若原點不位于參考坐標系XYZ原點中,如圖2所示。
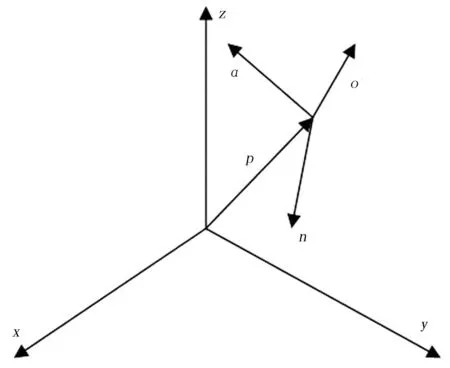
圖2 原點不位于參考坐標系原點的向量表示圖
則該參考坐標系XYZ可以用4個向量組成的矩陣進行表示,其位姿描述方程式為
(2)

結合前面的對采摘機械手位姿的描述,采摘機械手可以抽象為如圖3所示的坐標系。其中,采摘機器人末端執行器的坐標原點代表機械手段位置;以機械手在坐標系Onxnynzn上的投影為其位姿。
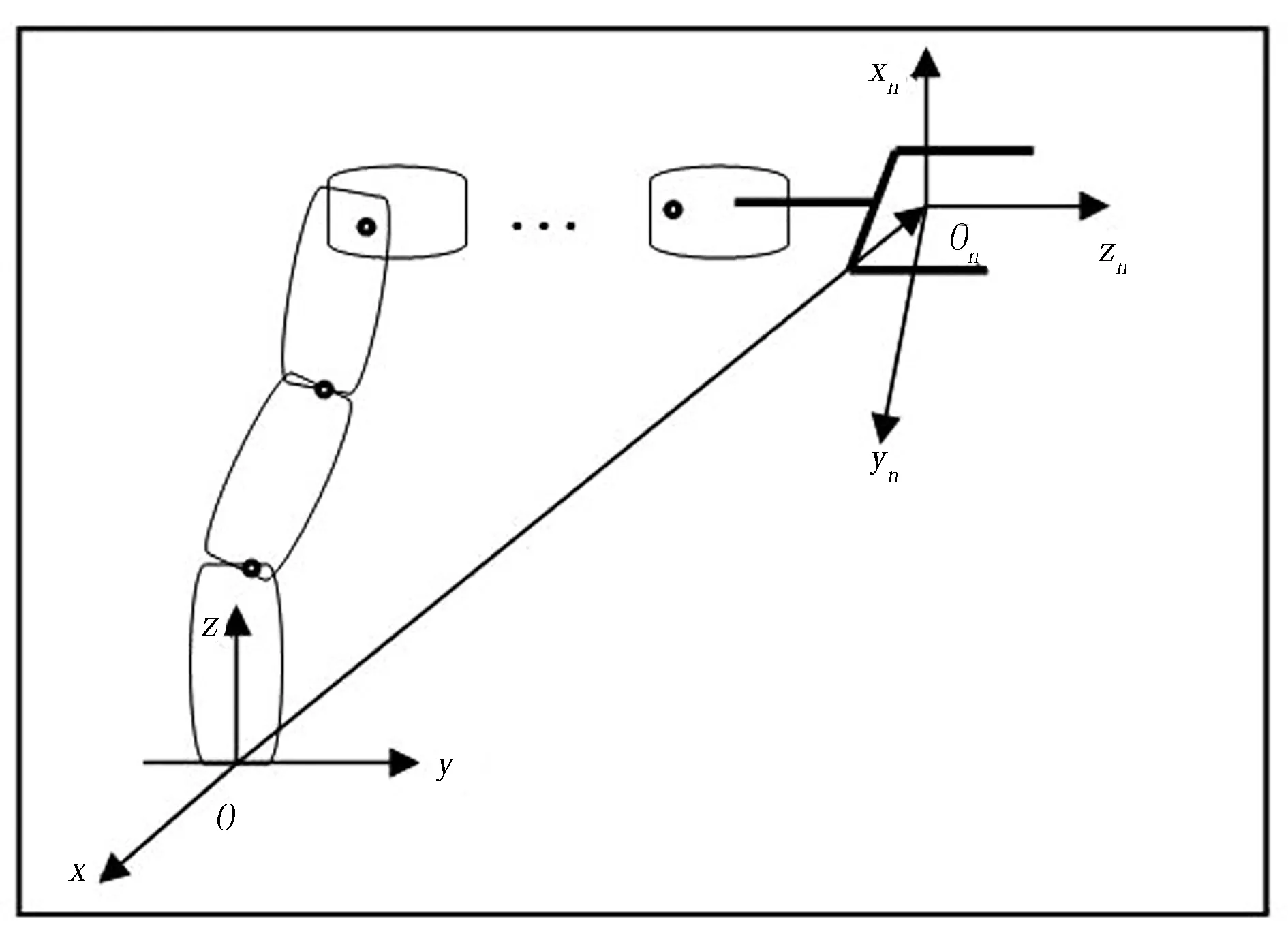
圖3 采摘機械手位姿坐標系抽象描述
圖3中,Oxyz為基礎坐標系,一般固定在采摘機器人前端機身上;Onxnynzn為采摘機械手坐標系;n為關節數量。另外,xn、yn、zn分別表示機械手坐標系中法線、位姿及接近的矢量。采摘機械手坐標系和基礎坐標系之間關系可以使用余弦R表示,即
(3)
其中,第1、2、3列分別是xn、yn、zn對基礎坐標系Oxyz中x、y、z方向的余弦值。一般可以用矩陣Tn表示采摘機械手位置和姿態之間的關系,即
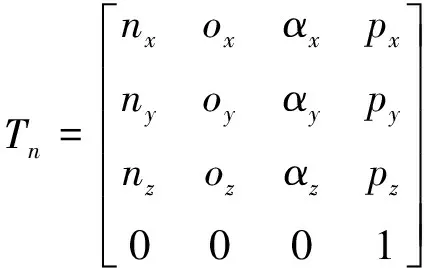
(4)
2 機械手運動控制和避障方法
2.1 運動控制和避障系統的要求
采摘機械手由手臂和末端執行器構成,機械手在作業中實時避開樹枝、成功采摘果實,除了依靠機械手靈活的自由度,還需要視覺伺服系統實時對環境的檢測,進而將信息傳遞給處理器,實現對機械手臂和末端執行器的控制。采摘機械手簡圖如圖4所示。

圖4 采摘機械手簡圖
在采摘機械手運動控制系統的研究中,視覺伺服系統非常重要,其根據工業攝像機獲取的圖像信息,去控制機械手臂和末端執行器與目標果實之間的相對位姿,從而保證果實采摘的準確性。基于圖像處理的視覺伺服系統如圖5所示。

圖5 基于圖像處理的機械手伺服系統
2.2 采摘機械手運動控制避障系統
采摘機械手在抓取果實的過程中,總會遇到一些果枝、葉子、非目標果實等障礙物的遮擋,因此采摘機械手運動控制最重要的部分是對采摘機械手進行避障路徑規劃。本文研究的采摘機械手為4自由度:第1個自動度是固定在機器人上的,主要是用來調整機械手的高度;第4個自由度是用來抓取目標果實,即采摘機械手的末端執行器;第2、3自由度為機械手將末端執行器順利移動至目標果實位置。因此,在整個避障策略中,只需要考慮第2、3自由度。采摘機械手運動控制避障模型如圖6所示。
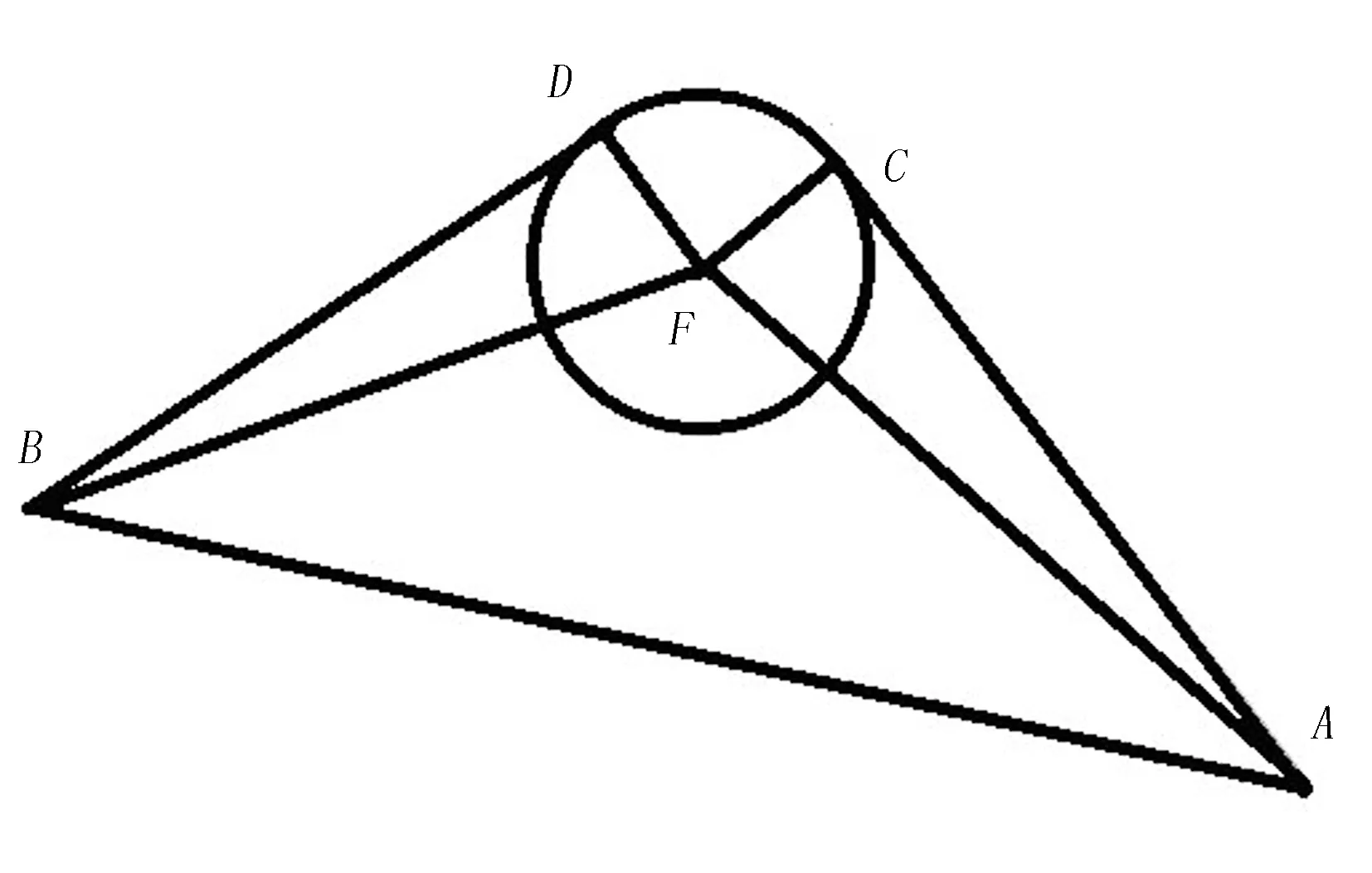
圖6 采摘機械手運動控制避障模型
圖6中,設定A(x1,y1)為采摘機械手末端執行器起點,B(x2,y2)為目標果實所在的位置,C(x3,y3)和D(x4,y4)為采摘機械手末端執行器避開障礙物圓心F需要經過的最短路徑,只需要∠DFC最小即可。假設∠DFC=θ,∠AFB=α, ∠AFC=β, ∠BFD=γ,則
(13)
在△AFB中,有
(14)
在△AFC中,有
(15)
在△BFD中,有
(16)
根據θ=2π-α-β-γ,求出∠DFC,就能實現采摘機械手避障的最優路徑。
3 采摘機械手運動控制系統硬軟件設計
采摘機器人在采摘作業中,需要準確無誤地對目標物體進行采摘作業,因此需要機械手配合視覺伺服系統進行操作,系統采用ATMEGA128為核心處理器。本文設計的機械手運動控制系統主要包括主控制模塊、驅動模塊、視覺系統和反饋模塊4部分,如圖7所示。
采摘機械手控制系統的設計一般需要滿足一般小型化、輕型化和模塊化等需求,因此在設計完成的機械結構時,搭建好硬件平臺,還需要采用模塊化的思想設計好軟件驅動。機械手角度調整子程序流程如8所示。
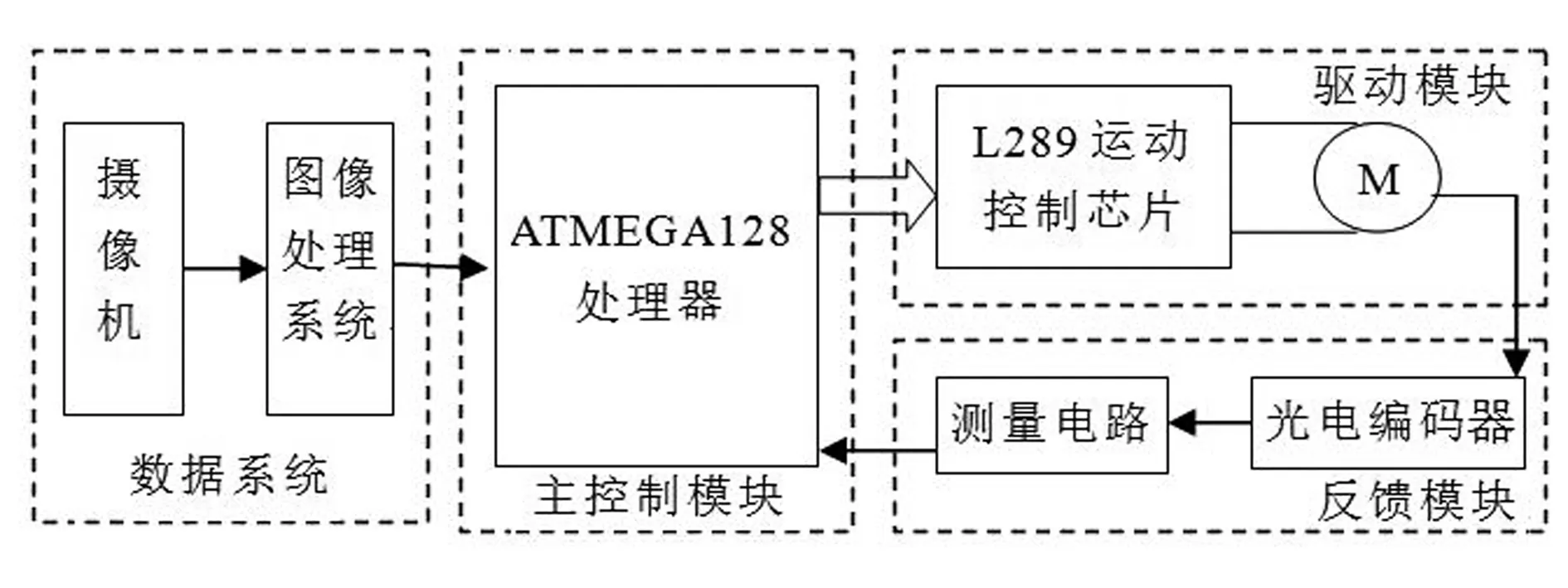
圖7 采摘機器人的電路控制框架圖
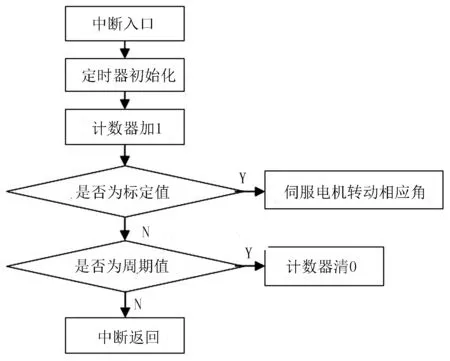
圖8 機械手角度調整子程序流程圖
4 實驗結果分析
為了驗證本文設計的采摘機械手運動控制及避障系統是否否和設計要求,也為了檢測該系統的實時性、穩定性和可靠性,針對該系統利用MatLab搭建了采摘機械手的仿真系統。實驗中,機械手末端執行器起點為(0,0,0),目標終點為(0.55,0.65,0.75)。
采摘機械手運動軌跡如圖9所示。圖9中,菱形為機械手末端執行器起點,五角星為終點。利用MatLab建立的三維仿真系統,結果表明:采摘機械手末端執行器能夠從起點成功運動到終點,且在途中避開中障礙物,達到了預期要求,驗證了系統的實時性、穩定性和可靠性。

圖9 采摘機械手運動軌跡
5 結論
針對采摘機器人末端執行器在作業過程中容易和樹枝、非目標果實發生碰撞這一問題,基于ARM嵌入式控制器和視覺伺服控制策略設計了采摘機械手運動控制及避障系統,并利用MatLab仿真軟件進行了采摘機械手末端執行器的三維仿真實驗。結果表明:采摘機械手末端執行器能夠從起點成功運動到終點,且在途中避開中障礙物,達到了預期要求,驗證了系統的實時性、穩定性和可靠性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32