智能斗輪堆取料機控制技術在煤場管理系統(tǒng)的應用研究
2019-12-25 01:14:48喬支昆尹新偉王艷春
無線互聯(lián)科技 2019年20期
關鍵詞:智能
喬支昆 尹新偉 王艷春
摘? ?要:近年來,煤電矛盾和煤炭供需矛盾有增無減,物聯(lián)網和信息技術的高速發(fā)展為發(fā)電企業(yè)設備的自動化和燃料管理的智能化提供了基礎。電廠硬件設備的技術升級改造,如斗輪機實現(xiàn)全自動控制、精確堆取料等,并且與數(shù)字化煤場相結合,燃料運行系統(tǒng)的數(shù)據(jù)實現(xiàn)與主機系統(tǒng)的實時共享,使智慧燃料系統(tǒng)的開發(fā)和建設成為可能。文章對智能斗輪堆取料機控制技術在煤場管理系統(tǒng)的應用進行了研究。
關鍵詞:智能;堆取料系統(tǒng);煤場
當前,國家經濟發(fā)展進入新常態(tài),通過內生動力提高自身水平已是大勢所趨。信息化與工業(yè)化的深度融合在傳統(tǒng)發(fā)電產業(yè)領域的作用也顯得更加突出,通過工業(yè)互聯(lián)網、云計算、大數(shù)據(jù)等信息技術在發(fā)電企業(yè)生產經營的深度應用,全面提升企業(yè)生產、管理的數(shù)字化、智能化水平,實現(xiàn)企業(yè)基于數(shù)據(jù)的科學決策目標。
傳統(tǒng)斗輪堆取料機以人工作業(yè)為主,或者一定程度上需要人為干預,操作人員的操作技能水平對設備作業(yè)效率影響較大,自動化程度不高、智能化水平較低、安全管控粗疏,無法滿足“以人為本、安全高效”的智慧型燃煤系統(tǒng)建設發(fā)展要求。隨著斗輪機自動控制技術的發(fā)展,目前國內技術水平能達到斗輪機現(xiàn)場無人值守狀態(tài),實現(xiàn)遠程操作,但距離斗輪機全自動智能運行,并能配合電廠燃料智能化管理還有一定的距離。
1? ? 煤場智能堆取料系統(tǒng)的建設目標
煤場智能堆取料系統(tǒng)旨在從數(shù)字化煤場管理系統(tǒng)中,獲取斗輪機全自動運行的初始輸入條件,并結合斗輪機上下游設備的運行要求,判斷斗輪機全自動運行的結束條件。在確保安全的前提下,以降低堆取能耗、提高料場占用比、改善工作人員工作強度為目標,通過定位技術、激光雷達技術、科學的數(shù)理模型等,實現(xiàn)全自動堆取料一鍵啟動、自動停止,同時在過程中自動尋優(yōu)斗輪機全自動運行的各項動作參數(shù),最后為配煤摻燒的尋優(yōu)提供準確數(shù)據(jù)。
本系統(tǒng)堅持安全性、實用性、先進性、開放性的建設原則,以節(jié)能、降耗、智能運行為核心,以提高企業(yè)的綜合收益能力為目標。提高上料效率,有效進行均勻配煤,提高鍋爐燃燒的穩(wěn)定性和燃煤效率;采用先進的設備和技術提高斗輪機堆取作業(yè)的精準度;滿足企業(yè)管理系統(tǒng)對生產數(shù)據(jù)的采集要求,滿足數(shù)字化煤場的需求,與數(shù)字化煤場系統(tǒng)相輔相成;提高企業(yè)的經濟效益和核心競爭力,實現(xiàn)斗輪機對散裝物料轉運的無人化、智能化控制。
該系統(tǒng)建設內容包含對斗輪機無人值守技術進行升級改造,以此為實現(xiàn)堆煤、取煤地址進行升級改造,加強斗輪機的調度管理,根據(jù)電廠煤種來源以及鍋爐配煤摻燒價值尋優(yōu)管理,配置多種斗輪機全自動調度方案,安全、有序地完成堆取料過程。
2? ? 煤場智能堆取料系統(tǒng)設計
煤場智能堆取料系統(tǒng)涉及斗輪機運行監(jiān)測系統(tǒng)、燃煤入庫管理、燃煤出庫管理、配煤方案管理、調度優(yōu)化。具體的系統(tǒng)功能有以下幾種。
(1)斗輪機運行監(jiān)測:圍繞斗輪機調度指令,基于斗輪機定位裝置,采集、分析斗輪機位置信息,進行斗輪機運行工況監(jiān)測,對斗輪機運行偏差及時捕捉并糾正,為煤場管理及配煤摻燒提供基礎。
(2)燃煤入庫管理:根據(jù)所設定的斗輪機堆放管理及進煤計劃,提供入場煤堆放建議,通過煤堆圖形預覽堆放后效果;可提供多批來煤批量入庫的操作指令,引導入廠煤到指定區(qū)域堆放;能從入廠衡器接口、堆料斗輪機、數(shù)字化標準化驗室或燃料管理信息系統(tǒng)直接獲取煤量及配煤的煤質數(shù)據(jù),實現(xiàn)對燃煤入庫的管理。
(3)燃煤出庫管理:根據(jù)輸入的斗輪機取煤調度指令,預覽該調度指令執(zhí)行后煤場堆型效果圖。對斗輪機的取煤作業(yè)進行記錄(可將對應時間段內堆、取煤地址記錄到系統(tǒng)中),可通過煤場輪廓曲線對照斗輪機運行情況,對于未按調度指令進行作業(yè)的,系統(tǒng)能記錄軌跡并進行示警。燃煤出庫操作完成后,煤場堆型效果圖及數(shù)據(jù)可根據(jù)斗輪機提供的數(shù)據(jù)進行動態(tài)展示。
(4)配煤方案管理:根據(jù)不同情況給出對應時段煤場配煤的方案,計算煤場配煤煤種、配煤比例,來調整斗輪機的預定速率,配煤方案經審核后執(zhí)行。
(5)調度優(yōu)化:基于煤場存煤、負荷分布、摻燒歷史給出最佳的煤場煤種調運指導方案,對燃料調度進行優(yōu)化。
2.1? 煤場智能堆取料系統(tǒng)網絡架構
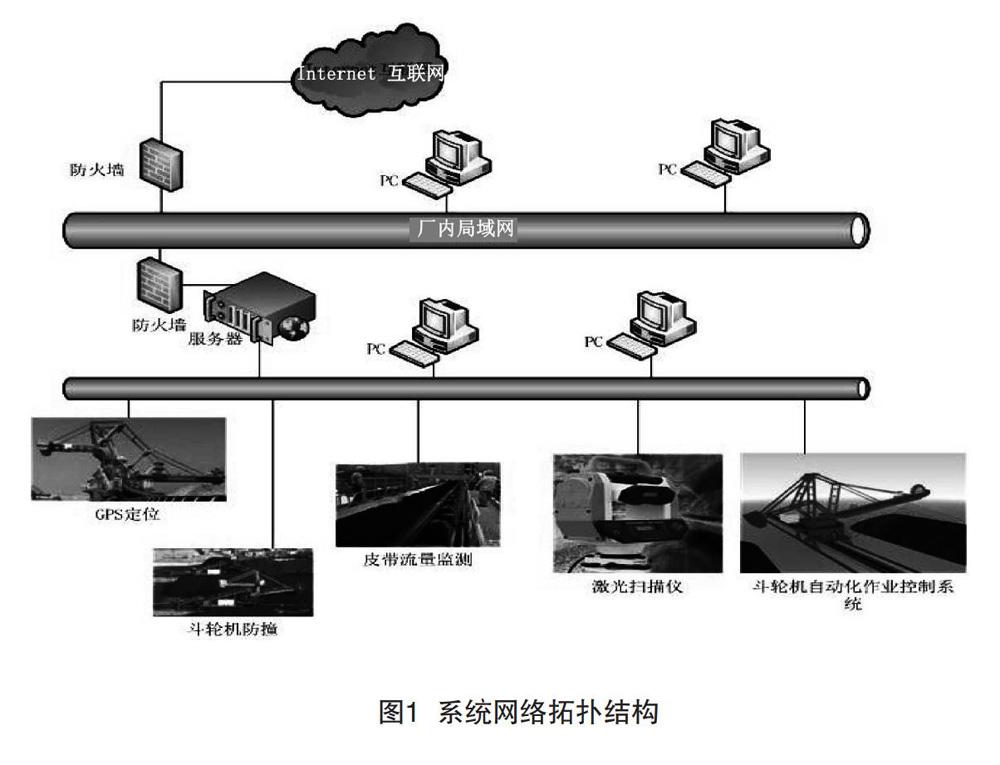
煤場堆取料系統(tǒng)網絡架構可分為3層,下層包括定位系統(tǒng)設備、防撞系統(tǒng)設備、皮帶秤、掃描儀設備等;中層系統(tǒng)是斗輪機智能控制系統(tǒng),主要是生產數(shù)據(jù)的采集和處理;上層是廠燃料管理系統(tǒng),主要是管理數(shù)據(jù)的綜合分析處理。上層管理系統(tǒng)與中層斗輪機智能控制系統(tǒng)相結合,為斗輪機智能控制系統(tǒng)提供全自動智能運行所需的各項數(shù)據(jù),制定斗輪機的運行方案。系統(tǒng)網絡拓撲結構如圖1所示。
2.2? 煤場智能堆取料系統(tǒng)的組成
煤場堆取料系統(tǒng)涉及斗輪機遠程管理下位機系統(tǒng)、斗輪機監(jiān)控操作站、煤堆三維掃描系統(tǒng)、安全保護系統(tǒng)和工業(yè)監(jiān)控系統(tǒng)。其中,斗輪機遠程管理下位機系統(tǒng)采用可編程邏輯控制器(Programmable Logic Controller,PLC)控制,程序采用流程化的過程控制,確保整個系統(tǒng)的穩(wěn)定性、可靠性。建立回轉速度與斗輪電流的閉環(huán)控制模型,采用數(shù)理模型分析,實時動態(tài)調整堆取料邊界,提高了作業(yè)效率,可實現(xiàn)實時取料量的穩(wěn)定,從而提高取料效率;斗輪機監(jiān)控操作站上位機軟件采用C#語言,功能強大,其靈活性足以滿足我們各項技術功能要求;煤堆三維掃描系統(tǒng)采用激光測距技術,經過后臺處理程序,能夠實時再現(xiàn)料場的三維模型,同時亦可以空間的形式嵌入上位機軟件中,方便操作員隨時查看;在料場數(shù)據(jù)準確的前提下,采用倒錐形安全算法對斗輪機與煤堆的碰撞可能性進行定量計算,在作業(yè)前確保作業(yè)過程中不會碰撞煤堆。在每臺斗輪機懸臂上安裝3個UWB,通過對兩臺斗輪機之間3×3=9個距離進行分析判斷,從而確保設備不會相互碰撞,采用煤場剖面差算法,確保斗輪機取料時不會發(fā)生煤堆坍塌;工業(yè)監(jiān)控系統(tǒng)重要區(qū)域無死角覆蓋,也為操作人員提供了視野上的便利。
3? ? 煤場智能堆取料系統(tǒng)功能
煤場智能堆取料系統(tǒng)通過激光掃描得到數(shù)據(jù)庫的堆取料點數(shù)據(jù)表,將料場分區(qū)域體積信息寫入數(shù)據(jù)庫的區(qū)域體積數(shù)據(jù)表。堆取料系統(tǒng)接收到自動堆取料命令后,根據(jù)輸入的物料種類、物料體積等參數(shù),對比數(shù)據(jù)庫,采用優(yōu)選算法,得出最佳堆取料區(qū)域,并推送給操作員。操作員參照推送方案(可人為修正),啟動全自動堆取料設備,自行運動至堆取料區(qū)域進行堆取料作業(yè)。單次堆取料回轉過程中采用雙閉環(huán)控制,實時調整回轉速度,確保堆取料的高效性。單次堆取料回轉結束后,計算出單次回轉物料體積變化參數(shù),建立衡量堆取料好壞程度的量化模型,對行走步進長度進行優(yōu)化,采用基于模糊數(shù)學的控制方式,得出下次回轉堆取料對應的位置狀態(tài)參數(shù),循環(huán)進行堆取料過程,直至整個堆取料操作結束。
4? ? 發(fā)展前景
目前,燃煤電廠的堆取料操作主要依賴司機就地手動操方式或遠程控制方式,這種傳統(tǒng)方法不僅勞動強度大,而且堆煤時容易造成煤垛不規(guī)則,取煤時流量波動大等情況。隨著科學技術的發(fā)展,將精確定位技術、激光三維掃描技術、自動控制技術、圖像處理技術、安全防范技術、實時數(shù)據(jù)庫技術等有機結合,使實現(xiàn)煤場精確堆取料系統(tǒng)成為可能。由于煤場面積大、煤的品種多、燃煤消耗快等原因,日常運營時需要投入大量的人力、物力去統(tǒng)計煤場實際的堆放情況,因此,實現(xiàn)煤場的數(shù)字化、信息化管理,有利于掌握實際存煤變化情況。
猜你喜歡
開放教育研究(2021年3期)2021-05-25 02:41:06
小學科學(學生版)(2020年12期)2021-01-08 09:28:04
裝備制造技術(2020年4期)2020-12-25 05:26:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
能源(2018年4期)2018-05-19 01:53:44
