穿村鎮公路橫向干擾關鍵因素識別*
2019-12-27 10:16:36張志清賀成林
武漢理工大學學報(交通科學與工程版) 2019年6期
趙 磊 張志清 劉 豪 賀成林
(北京工業大學交通工程重點實驗室 北京 100124)
0 引 言
在我國城鎮化快速發展的背景下,穿村鎮公路里程數有了明顯的增長,但同時穿村鎮路上交通事故率也在顯著提高[1],其中影響穿村鎮公路安全的最關鍵因素為橫向干擾[2].
目前,已有學者對橫向干擾進行了相關的研究.Pan等[3]研究了非機動車對機動車速度的影響,并建立了速度預測模型.Hossai等[4]研究了自行車在混合交通流中所占比例與機動車速度之間的關系.研究發現,自行車比例越高,對機動車速度影響越大.任剛等[5]以單幅路為研究對象,在大量實測數據基礎上,采用多因素方差法檢驗路內干擾對車速產生的影響,建立了綜合機非干擾、對向干擾和橫向干擾的實用路阻函數模型.祝站東[6]通過對不同的路側干擾因素進行調查,利用理論分析與統計回歸的方法建立了路側干擾對運行速度的影響模型.
這些研究大多是針對橫向干擾作用下的車速變化展開研究,并沒有找出穿村鎮公路產生橫向干擾的關鍵的因素,以便從根本上消除或減弱橫向干擾,保證穿村鎮公路的交通安全.為此,本文以北京琉辛路和寧波長樂路為例,通過對沿線村鎮交通特征的調查,找出穿村鎮公路產生橫向干擾的關鍵因素,并將其量化表達.
1 橫向干擾定義
穿村鎮公路不同于一般普通公路,除了滿足正常的過境車輛行駛之外,還要為當地居民的生活、商業,以及交通活動服務,因此,為提出橫向干擾的定義,將穿村鎮公路與高速公路和城市道路進行比較,見表1.
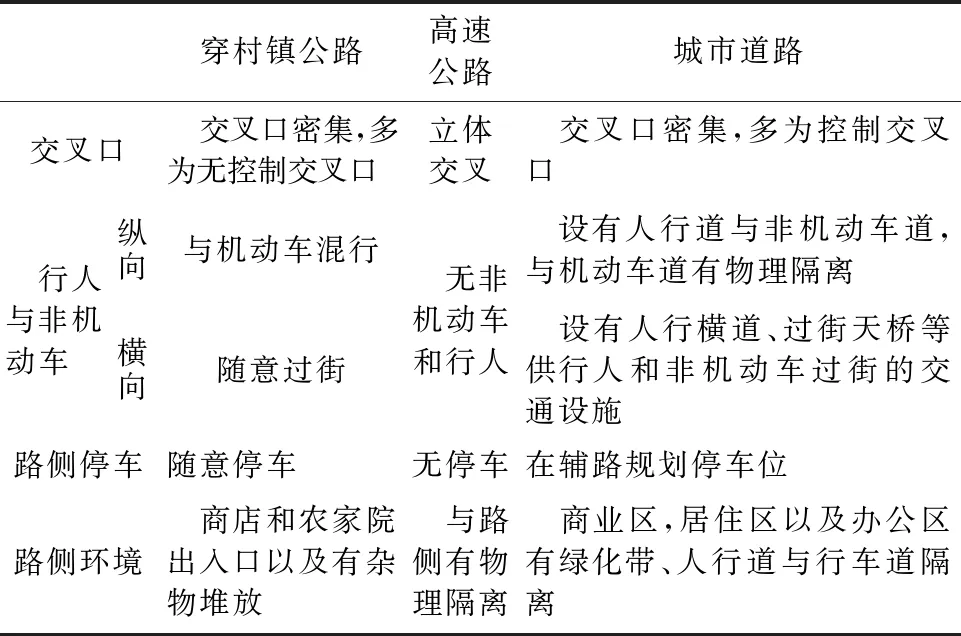
表1 穿村鎮公路與高速公路和城市道路比較
由表1可知,穿村鎮公路與城市道路和高速公路的主要差異是,支路出口,復雜的交通組成以及雜亂路側環境對行車的影響.
因此,綜合考慮這三種影響因素提出穿村鎮公路橫向干擾的定義:行車道與路側無物理分隔以及交叉口無控制的條件下,行人、非機動車、路側停車和堆積雜物,以及支路出車對穿村鎮公路外側車道上機動車行駛過程中所造成的影響,稱為橫向干擾.
2 穿村鎮公路橫向干擾影響因素調查
2.1 交叉支路頻密
選取北京市琉辛路和寧波長樂路兩條典型的穿村鎮公路進行分析.琉辛路不老屯鎮路段起點在不老屯黃土坎村,途經燕落村,終點在不老屯鎮,全長6.2 km.此路段處于村鎮內部的路段占全長近50%,是典型的過境道路路段.穿村鎮公路的村鎮內部路段接入口頻密,見燕落村路段示意圖1和燕落村路段平面交叉口調查表2.
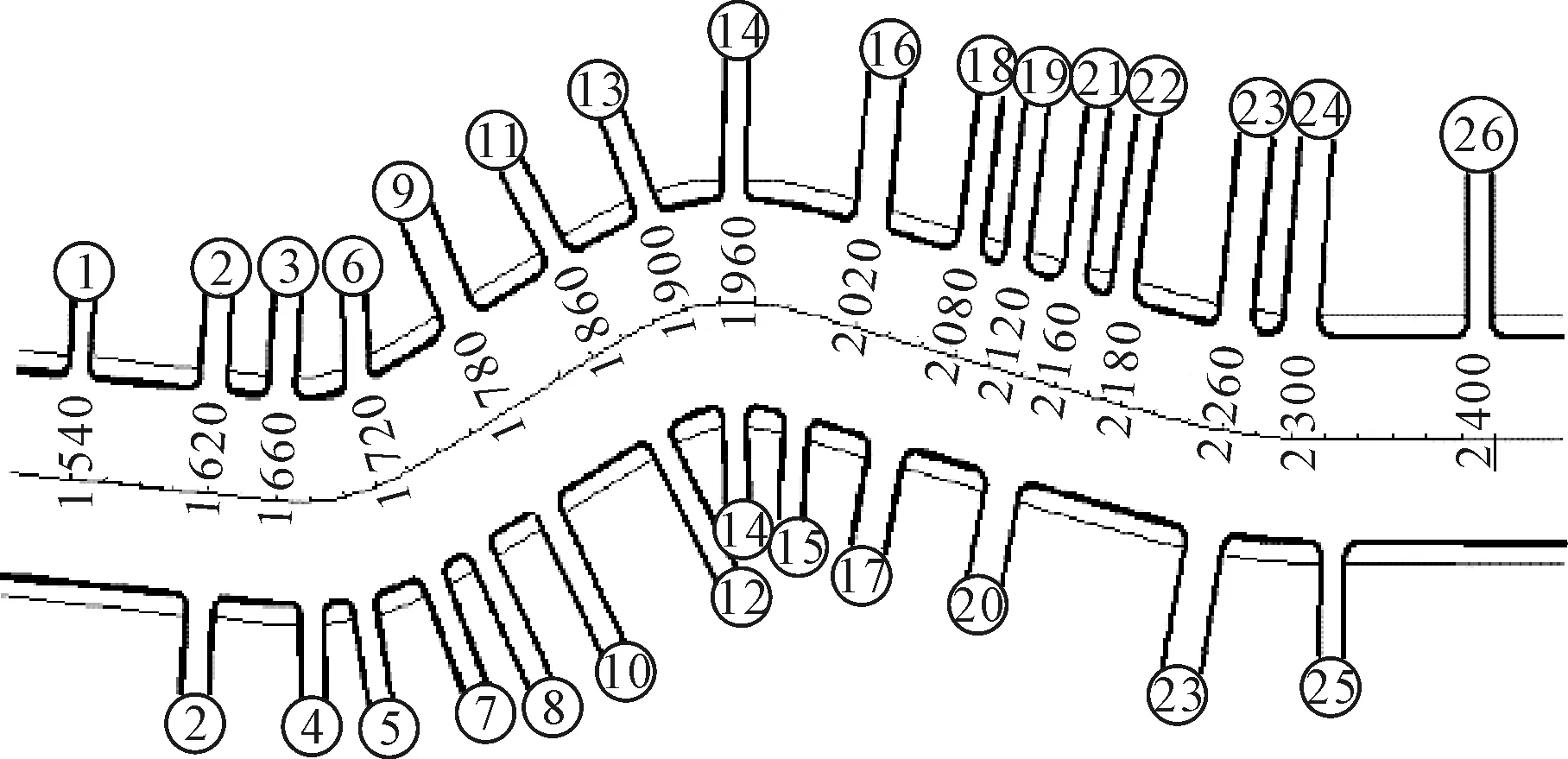
圖1 燕落村路段平面交叉口示意圖
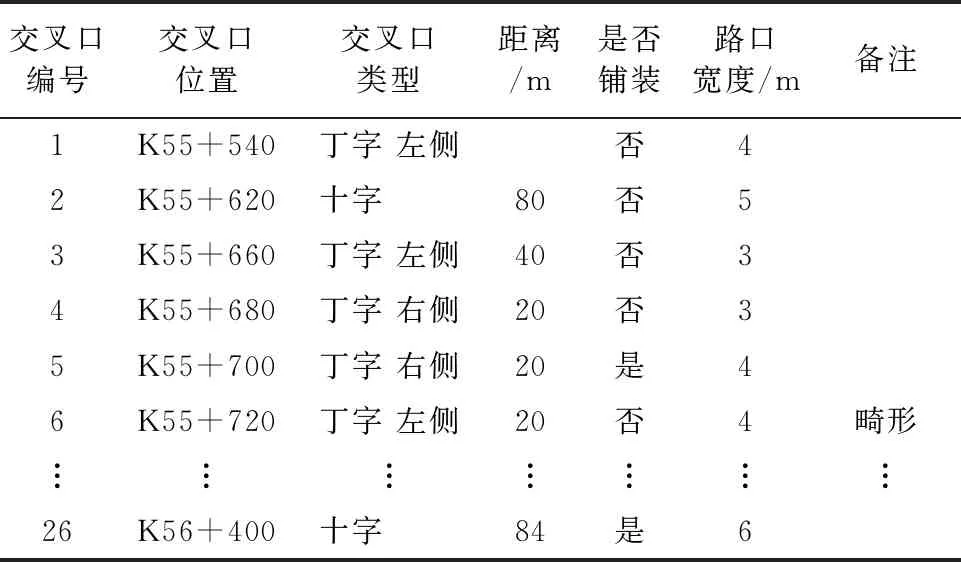
表2 燕落村路段平面交叉口調查表
調查數據顯示,琉辛路燕落村路段在不到860 m的路段上分布著26平面交叉口,平均不到33 m就有一個交叉口,穿村鎮公路的村鎮內部路段頻密的交叉口增大了橫向干擾,嚴重影響到穿村鎮公路上的機動車行駛.
2.2 交通組成復雜
穿村鎮公路上的交通組成與一般公路的交通組成有很大的區別,路上行人、非機動車流量大、且占整個交通組成的比例高.
通過對密云縣北部五個典型由公路穿過的村鎮(不老屯鎮、石城鎮、太師屯鎮、馮家峪鎮、高嶺鎮)進行調查后發現,當地居民的日常出行中,步行出行方式占比達35%~40%,自行車出行占比25%~30%,摩托車占比15~25%,公共交通在日常出行中占比較低,見表3.
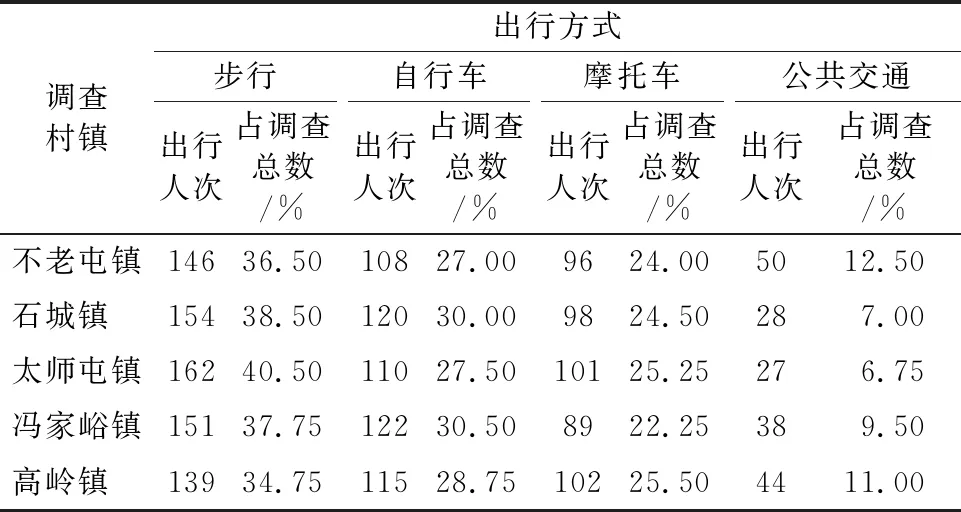
表3 北京密云村民出行調查表
以上調查表明,居民日常活動出行方式,步行、自行車和摩托車所占比例較大(占到所有出行方式的90%左右).在過境路段上行人,自行車、摩托車以及各種車輛混行,不僅增加了橫向干擾,還危及到村民生命財產安全.
2.3 路側環境混亂
過境道路兩側通常是房屋建筑,橫斷面的寬度受到制約,房屋與道路之間的橫向空間不足,再加之村鎮內交通管理力度不足,導致道路兩側居民對道路空間的侵占.集發路和長樂路是寧波市近郊區的過境道路,道路侵占程度嚴重,見圖2.
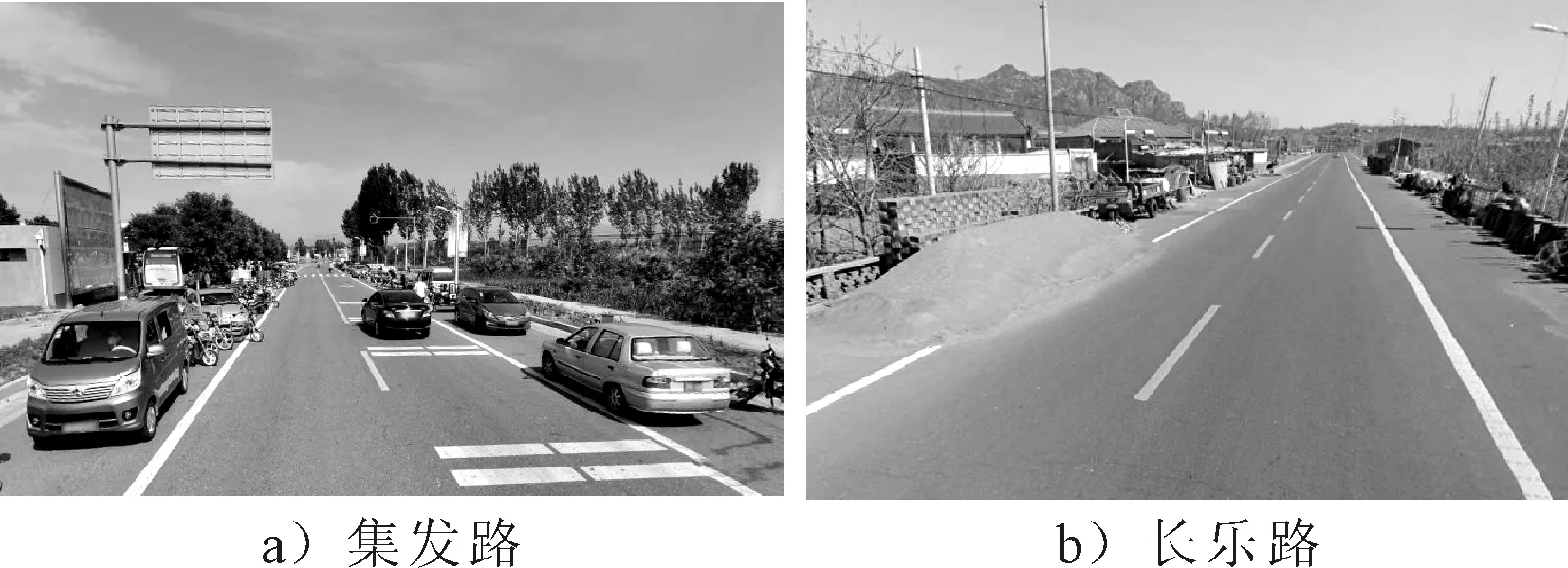
圖2 寧波市穿村鎮公路
通過對寧波市長樂路和集發路調查發現,公路兩側的村鎮城鎮化程度較高時,公路兩側居民對道路空間侵占更加嚴重.如路側的經營性店面會侵占道路擺攤;居民將路肩當做庭院使用;小汽車、自行車、摩托車的隨意停放;堆放建筑垃圾等,增加了道路的橫向干擾.
通過上述的調查,可將穿村鎮公路橫向干擾分為靜態干擾和動態干擾兩大類,見表5.

表5 橫向干擾因素
3 橫向干擾的量化表達
3.1 橫向干擾變量定義
基于對穿村鎮公路橫向干擾因素的調查,得到穿村鎮公路上影響車輛行駛的主要因素有:行人、自行車、摩托車、農用車、路邊停車或堆放雜物、路側支路出車.同時引入橫向干擾變量H:表示公路上每分鐘每千米路段出現的橫向干擾頻數.計算公式為
H=α1p+α2b+α3m+α4t+α5g+α6c
(1)
式中:p,b,m,t,g,c分別為行人、自行車、摩托車、路邊停車或路邊堆積物、農用車、支路出車每分鐘在觀測路段出現的頻數.α1,α2,α3,α4,α5,α6為各干擾因素的權重.
3.2 基于問卷調查的層次分析法主觀權重標定
3.2.1層次分析法理論基礎
層次分析法[7-8]的步驟包括:
1) 考慮所要研究問題包含的主要因素,分析各因素之間隸屬、平行關系,建立有序的層次結構模型.
2) 同一層次的各個因素進行比較,當同層次任意兩個因素進行比較時,需要對它們之間的相對重要度進行計算.
3) 計算各因素權重,對判斷矩陣A計算最大特征根λmax,得到特征向量W=(w1,w2,…,wn),其中分量wi就是第i個因素的權重.采用和積法計算,將判斷矩陣A的每一列歸一化處理:
(2)
將歸一化后的矩陣按行相加:
(3)

(4)
4) 一致性檢驗,為了檢驗在因素比較時是否會存在自相矛盾的現象,需要對比較矩陣進行一致性檢驗.一致性檢驗的指標C.I.計算公式為
C.I.=(λmax-n)/(n-1)
(5)
查表確定平均一致性指標R.I.,見表6.
計算平均一致性指標C.R.:
C.R.=C.I./R.I.
(6)
一般認為C.R.<0.1,就可以表示判斷矩陣具有較高的一致性.
3.2.2構建橫向干擾評價層次結構模型
基于穿村鎮公路橫向干擾因素的調查成果,結合駕駛人對路側干擾的主觀感知,建立了橫向干擾評價的層次結構模型,見圖3.
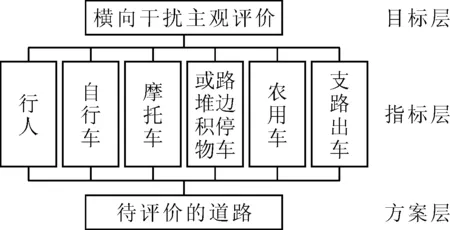
圖3 橫向干擾評價層次結構模型
3.2.3調查問卷及一致性檢驗
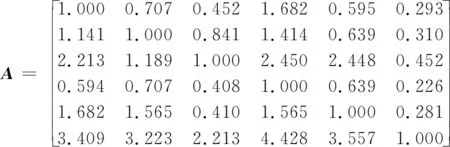
在北京市密云縣和山東省泗水縣進行問卷調查,共發放紙質問卷63份,回收問卷60份,問卷回收率95%.將問卷整理得到60個判斷矩陣,對判斷矩陣進行一致性檢驗.以某一個調查對象的問卷得到的判斷矩陣為例.
由式(2)~(4),采用積和法進行計算,得到
W=[0.082 3 0.116 0.203 0.053 0.100 0.445]
由式(5)可得到
λmax=6.096C.I.=0.019
查表2,n=6,R.I.=1.24得
C.R.=C.I./R.I.=0.0153<0.1
因此,此矩陣的一致性通過檢驗.
3.2.4計算各因素權重
每個調查對象,本文認為其權重都是一樣的,對60個判斷矩陣進行加權幾何平均得到一個復合矩陣.
利用式(2)~(4)可得特征向量W:
W=[0.096 0.119 0.198 0.077 0.126 0.384]
得到橫向干擾變量各個因素權重,見表7.

表7 基于層次分析法的橫向干擾變量權重標定
3.3 基于車輛橫向偏移的熵權法客觀權重標定
3.3.1熵權法的理論基礎
熵權法是一種根據各項指標觀測值提供的信息量來確定指標權重的方法,若一個指標的信息熵越小,表明該指標提供的信息量越大,變異程度越大,在綜合評價中的作用越大,權重也就越大,多應用在安全分析評價等方面[9].
熵權法計算權重的步驟為
1) 設有m項觀測值,n個評價指標構成的原始數據矩陣:
對原始矩陣X進行處理,得到矩陣
P=(pij)m×n
式中:pij為第j個評價指標在第i個觀測值的特征比重,計算公式為
(7)
2) 定義第j個指標的熵值:
(8)
3) 對數據進行歸一化處理,計算權重:
(9)
3.3.2車輛的橫向偏移
采用橫向偏移距離表示車輛橫向位置的改變,其物理模型公式為
(10)
基于此,利用車輛的橫向偏移距離作為觀測值,以行人、自行車、摩托車、路側停車或堆積物、農用車、支路出車6種橫向干擾因素為橫向干擾變量評價指標,計算橫向干擾變量中各個干擾因素的權重.
3.3.3車輛軌跡數據的采集
利用無人機在選定路段拍攝視頻.將視頻導入到SIMI Motion軟件,并對視頻坐標進行標定,以0.04 s時間間隔對車輛位置進行逐幀拾取,獲得車輛位置坐標,軟件自動補充未拾取的軌跡點,形成車輛運動軌跡圖.
3.3.4計算各因素權重
分別得到行人、自行車等6種橫向干擾因素影響下各100條行車軌跡.利用式(9)計算得到每條行車軌跡的橫向偏移距離,并找出最大值作為橫向偏移距離觀測值.
選用車輛橫向偏移距離觀測值為分析資料,分別以6種橫向干擾因素為指標即為n1,n2,n3,n4,n5,n6指標,構成數據矩陣,見表8.
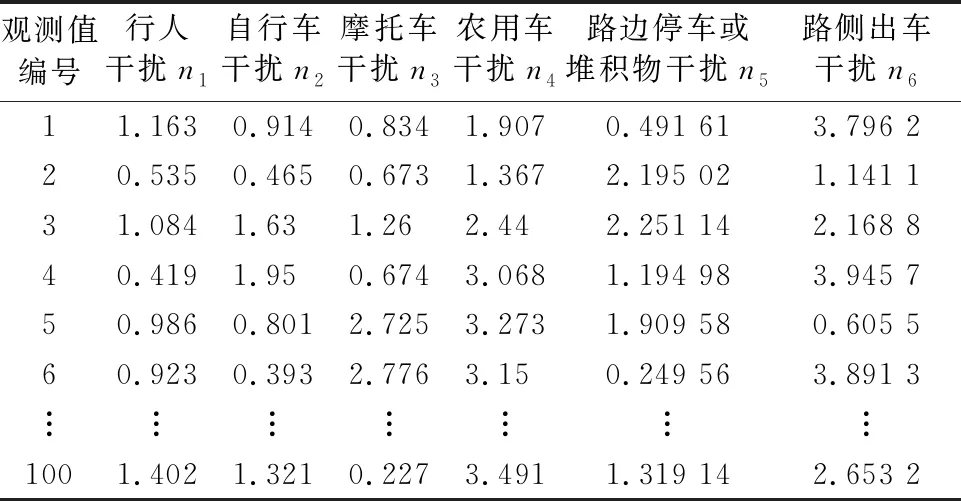
表8 數據矩陣
根據式(6)~(8)計算橫向變量權重,見表9.

表9 干擾因素客觀權重表
3.4 權重融合
根據層次分析法、熵權法兩種不同的求權重分析方法對橫向干擾變量中的各橫向干擾因素權重進行主觀賦權和客觀賦權.為使權重更符合實際[10-11].用式(11)將兩種方法求得結果進行融合.
wj=α1wj′+α2wj″j=1,2,…,n
(11)
式中:wj為主客觀綜合賦權法得到的第j個指標的權重;wj′,wj″分別是由主觀賦權法和客觀賦權法得到的確定的第j個指標的權重;α1,α2分別為主客觀的權重,本文認為主客觀權重要平等考慮,α1=α2=0.5.
因此,根據表3、表5及式(11)可得各干擾因素在橫向干擾變量中所占的主客觀綜合權重,其中支路出車權重最大,見表10.

表10 綜合權重表
4 結 論
1) 通過與城市道路和高速公路的對比,提出橫向干擾的定義.
2) 對北京琉辛路和寧波長樂路兩條典型穿村鎮公路橫向干擾情況進行實地調查,找出主要的干擾因素,并將橫向干擾因素分為靜態和動態兩類.
3) 運用層次分析法及熵權法從主、客觀對橫向干擾影響因素的權重進行標定,并對權重融合,得出穿村鎮公路橫向干擾的關鍵因素為支路出車.
猜你喜歡
中老年保健(2022年5期)2022-08-24 02:36:04
公民與法治(2022年5期)2022-07-29 00:47:28
商品與質量(2021年43期)2022-01-18 05:31:32
教學考試(高考物理)(2021年5期)2021-11-08 10:31:22
石油瀝青(2021年4期)2021-10-14 08:50:40
當代陜西(2021年12期)2021-08-05 07:45:46
中醫眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
人民交通(2019年16期)2019-12-20 07:04:10
中國公路(2017年12期)2017-02-06 03:07:33
冰雪運動(2016年4期)2016-04-16 05:54:56
