拉伸機復合式主拉伸缸裝置
2019-12-30 08:47:36汪恩輝左雁冰
重型機械 2019年6期
關鍵詞:活動
常 瑜,張 超,汪恩輝,陳 峰,左雁冰
(中國重型機械研究院股份公司,陜西 西安 710032)
0 前言
隨著我國經濟的快速發展及制造業水平的不斷提高,鋁合金材料特別是大斷面鋁合金厚板材料市場需求快速增長,尤其是國家“大飛機”項目的實施,對高品質鋁合金厚板的需求變得更加迫切,萬噸級張力拉伸機是生產高性能航空級鋁合金厚板產品的關鍵設備,經過預拉伸的航空級鋁合金厚板具有強度高、韌性好、內應力小等優良性能,其開發研制對我國航空、軍事、民用工業以至國民經濟發展具有十分重大的意義。而主拉伸缸是拉伸機機組中最重要的部件之一,負責給整個機組提供拉伸驅動力。傳統的普通油缸一般僅為柱塞缸或活塞缸,實現的功能比較單一,產生的壓力與行程調整范圍有限,且不具有緩沖能力,本文中的復合式主拉伸缸裝置克服了傳統普通油缸的一系列不足,有效地將拉伸與快速移動功能集成為一體,可以同時實現小負載、大行程與大負載、小行程的完美切換。當板材發生斷帶的瞬間,由于主拉伸缸裝置仍處于工作狀態,會瞬間給拉伸機活動部分(主要是活動頭)一個巨大的沖擊,如果不加限制,將會導致拉伸機的重大損壞。為了防止斷帶過程帶來的巨大沖擊對設備造成損壞,主拉伸缸裝置采用液壓緩沖的方式,通過合理設置緩沖液壓系統的參數,能夠使得主拉伸缸等運動部件在短時間內緩沖掉斷帶過程帶來的沖擊。
1 120 MN拉伸機主拉伸缸的結構組成及工作原理
120 MN拉伸機機組主要由主拉伸缸、活動夾頭、固定夾頭、壓梁總成、緩沖復位裝置等組成,如圖1所示。
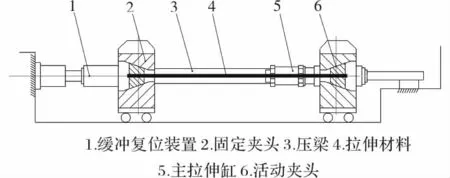
圖1 120 MN拉伸機的結構組成
主拉伸缸共兩套,對稱分布在拉伸機的兩側,其一端與壓梁連接,另一端與活動夾頭連接。如圖2所示為主拉伸缸的內部結構圖。
由圖2可見,主柱塞缸缸體2與主柱塞3構成一個柱塞缸,活塞缸缸體4與活塞桿7構成一個活塞缸,主柱塞3內部為空腔體,活塞缸缸體4套在主柱塞3的空腔體內。活塞桿7其中一端穿過活塞缸缸體4、主柱塞3和主柱塞缸體2,與壓梁1的壓縮柱固定,在活塞缸缸體4內由密封套密封,另一端則與外部連接,活塞缸缸體4與承受外負載的活動機頭5相連。
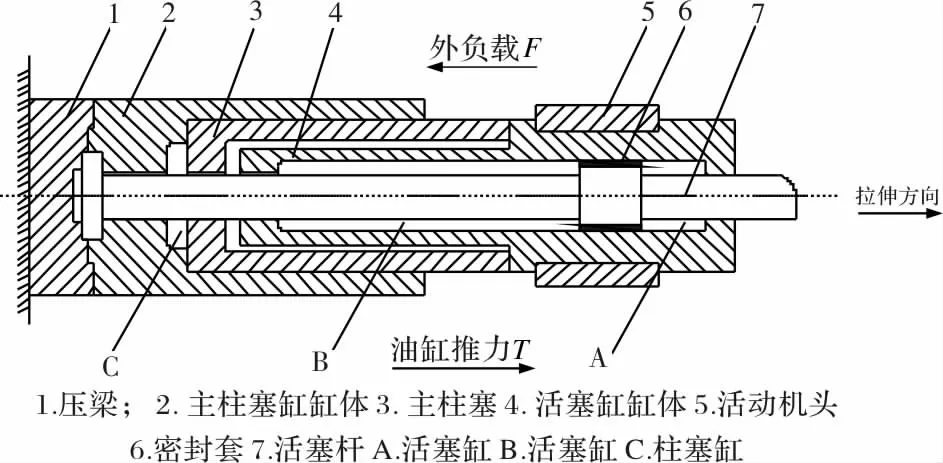
圖2 主拉伸缸內部結構圖
設備拉伸前根據來料的長度,需要將活動機頭移至合適的位置。在小負載、大行程的情況下,活塞缸A腔進油,活塞缸缸體伸出主柱塞,并帶動活動機頭向右快速運動;活塞缸B腔進油,活塞缸缸體縮回主柱塞,并帶動活動機頭向左快速運動。在大負載、小行程的情況下,柱塞缸C腔進油,主柱塞推動活塞缸缸體帶動活動機頭向右運動,完成拉伸;當需要返程時,活塞缸B腔進油,活塞缸缸體帶動活動機頭推動主柱塞返回。
當活動機頭沿著拉伸方向拉伸板材時,板材也會給活動機頭一個與拉伸方向相反的外負載F。當板材發生斷帶時,外負載F會突然消失,活動機頭會帶動活塞缸缸體由于瞬間釋放的彈性能作用,沿拉伸方向產生巨大沖擊,此時活塞缸B腔產生瞬時高壓,并通過安全閥泄荷,對承受外負載的活動機頭及主拉伸缸起到了液壓緩沖的作用。
2 斷帶后主拉伸缸的緩沖距離
板材發生斷帶時,活動機頭的運動及緩沖缸中壓強都會發生變化。而機械結構零部件的具體受力情況也在變化。將C腔當作工作腔,將B腔當作緩沖腔,則工作腔和緩沖腔的橫截面積分別為
S工=2 m2
S緩=0.258 m2
板材斷帶前,工作腔初始壓強為p工=30 MPa,緩沖腔初始壓強為0 MPa,斷帶發生后,在極短時間內,工作腔壓強降為0 MPa,緩沖腔壓強升至溢出壓強p緩=40 MPa。假設板材發生斷帶時,工作腔初始長度為l工=2 m,則可以計算得到緩沖腔初始長度為l緩=3.58 m。
液壓缸中壓強與長度的關系式為
p=p0+Kln(l0/l)
(1)
式中,p0為液壓缸中的初始壓強;l0為油腔的初始長度;取K=1×103MPa。
由式(1)可得到工作腔和緩沖腔的長度分別為
由此可以看出長度變化相對于初始長度來說變化較小,因此可以認為在緩沖過程中油腔的長度不變,利用體積彈性模量,可以計算斷帶后瞬間工作缸和緩沖缸的長度變化為

因此,工作腔在緩沖過程中做正功,緩沖腔在緩沖過程中做負功。在斷帶發生到活動機頭停止運動的過程中,由能量守恒定律,工作腔做功應等于緩沖腔做功,即
W工=W緩
工作腔做功可以表示為
而緩沖腔做功可以表示為

式中,Δl為主拉伸缸緩沖的距離。
4 斷帶后主拉伸缸緩沖動力學仿真分析
采用了Solidworks對拉伸機機組進行三維建模,其模型如圖3所示。然后轉換成ADAMS兼容的格式,導入到ADAMS工作環境中進行零部件材料屬性設置,約束設置及受力設置等。對于材料屬性設置,在Material Type中選擇零部件的材料,如活動頭的材料設置為鋼鐵,則ADAMS就能根據零部件的形狀,自動計算出零部件的質量以及質心的位置。對于約束設置,在拉伸機機組中,主要需要設置一些固定的約束,如壓梁底座、工作液壓缸固定在地面上,活動頭與主拉伸缸固連在一起等。除此之外,主要利用ADAMS中的Connectors模塊中的相應約束來對零部件之間的約束進行定義,如液壓缸之間的相對滑動。對于受力設置,利用ADAMS中的Forces模塊進行力的定義,在斷帶過程中,拉伸機的受力主要是工作缸和緩沖缸中的液壓作用,以變化的作用力模擬了液壓缸的液壓作用。其中工作缸的液壓作用等效為作用在工作缸活動部分上的變力作用,緩沖缸的液壓作用等效為作用在緩沖缸活動部分上的變力作用。

圖3 拉伸機機組的三維模型
在不考慮缸體之間的摩擦及油液的熱膨脹的情況下,通過ADAMS中的Simulation模塊進行仿真,得到板材斷帶后活動機頭帶動活塞缸缸體的緩沖運動的仿真結果,如圖4所示。
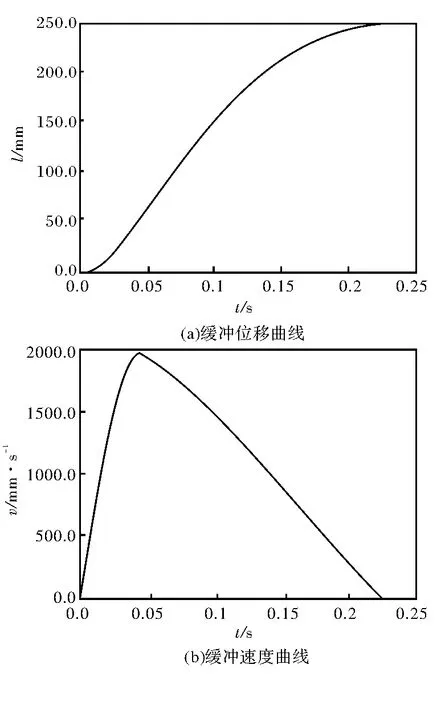
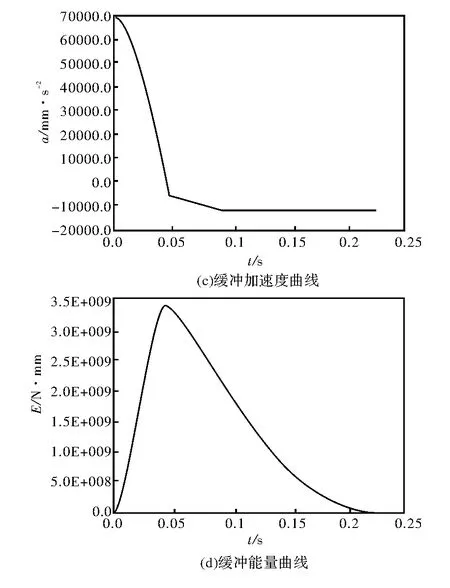
圖4 主拉伸缸緩沖運動曲線
圖4中可以看出,主拉伸缸緩沖過程中,緩沖時間極短,約為0.2 s,主拉伸缸向前緩沖的距離約為250 mm,與數值計算結果246 mm基本吻合。緩沖過程中達到的最大速度約為18 m/s,初始加速度很大,可以達到約70 m/s2,能量達到3.5×109N·mm,但持續的時間很短,在0.05 s左右開始減速直到速度降為0。
5 結語
本文根據中國重型機械研究院股份公司為某廠成套供貨的120MN張力拉伸機,分析了主拉伸缸的結構組成及工作原理,并分別對主拉伸缸采用數值計算和動力學仿真相結合的方式,通過對比不僅驗證了仿真分析計算的可靠性和合理性,而且為今后探討主拉伸缸在拉伸過程中的斷帶緩沖實時監測提供科學依據。
猜你喜歡
齊魯師范學院學報(2022年5期)2022-10-13 10:04:18
少先隊活動(2022年5期)2022-06-06 03:45:04
家庭科學·新健康(2022年3期)2022-05-10 00:32:13
天津音樂學院學報(2021年4期)2022-01-08 02:18:52
中老年保健(2021年2期)2021-08-22 07:31:10
少先隊活動(2021年1期)2021-03-29 05:26:36
快樂語文(2020年30期)2021-01-14 01:05:38
海峽姐妹(2018年3期)2018-05-09 08:20:40
質量與標準化(2015年8期)2015-07-18 11:11:08
質量與標準化(2015年12期)2015-07-10 15:11:50
