計算機視覺系統在放射治療擺位中的應用研究*
2020-01-01 03:43:16張艷賢徐子海
中國醫學裝備 2019年12期
張艷賢 徐子海
計算機視覺是一門新興學科,主要研究如何通過攝像機和計算機的連接獲取拍攝對象的數據和信息,即利用計算機模擬和延伸人的視覺功能,通過獲取二維圖像來識別與重構三維環境信息,不僅包括物體的形狀、大小等表面特性,還包括位置、空間運動參數等動態信息,并能對以上信息進行分析、處理、利用及存儲。
近年來,有學者將其應用于放射治療過程中,可協助糾正患者體位誤差、監測患者體位變化并協助呼吸門控開關起作用,全程充當“醫師助手”,在提高治療精確度的同時簡化放射治療擺位驗證流程,展現出極大的臨床應用潛力。通過重點介紹近年來計算機視覺系統在腫瘤放射治療擺位糾正中的研究現狀與發展,分析其優缺點,探討其臨床實用價值。
1 腫瘤放射治療擺位與計算機視覺系統
1.1 腫瘤放射治療擺位
放射治療是腫瘤的三大治療手段之一,約有70%的腫瘤患者需在治療過程中接受放射治療。放射治療靶區的劑量高低決定腫瘤的局部控制率,而在治療過程中,機器誤差、擺位誤差及固定技術等外部因素,以及患者呼吸運動、體位、體重變化、腫瘤自身消退、腫瘤周圍正常組織器官運動及充盈程度等患者自身因素引起的位置變化均會影響靶區受照劑量的準確性,影響治療效果。其中,對靶區位置變化影響最大的因素為呼吸運動,故呼吸運動的跟蹤和建模有利于在外照射過程中精確制定治療計劃及計算劑量[1-2]。
目前,臨床常用的減少由呼吸運動引起誤差的方法有屏氣技術、實時腫瘤跟蹤技術及呼吸門控技術等,皆高度依賴X射線攝影和(或)透視成像,會增加患者受射線照射的頻率,且定位的標志物多采用在患者體表或固定體模上做標記,甚至手術植入金屬標志物,為患者帶來不便[3-6]。
在患者定位過程中應用計算機視覺系統,采用非接觸測量手段即可得到準確的測量結果[7-9]。在治療前依據計算機視覺系統探測的數據對擺位情況做出精確快速調整,還可通過實時監測記錄腫瘤在放射治療過程中隨呼吸運動的位移情況,為患者提供精確可靠的擺位誤差信息,以評判放射治療計劃的優劣及重新計劃的必要性,同時為靶區外擴大小提供數據參考,提高擺位精度,強化治療效果。
1.2 計算機視覺系統
自20世紀70年代以來,計算機視覺技術從處理簡單的二維圖像到研究復雜的三維視覺原理、模型及算法,至今已形成一套獨立的計算理論與算法,該技術涉及多門學科交叉,在圖像處理、數學、人工智能(artificial intelligence,AI)及醫療等領域應用廣泛。
光學成像技術是計算機視覺技術的分支之一,在放射治療領域已開發出一套基于可見光的表面掃描系統[10]。利用此類系統對患者體表進行光學掃描跟蹤,并通過計算機軟件與實時獲得的體表影像匹配,將匹配結果以不同顏色投影到患者體表,可協助技術員根據投影顏色差異及時糾正患者體位誤差。還實時監測患者體位隨其呼吸、運動等變化的情況,并協助呼吸門控開關起作用,提高治療精確度,簡化擺位驗證流程。
目前,計算機視覺系統中應用的圖像視頻采集系統主要由電荷耦合器件(charge-coupled device,CCD)攝像頭和采集卡組成。隨著電子科技的發展,數字攝像機以其圖像質量佳、畫面失落少、記錄密度高、可靠性高、機器體積小及使用成本低等諸多優點得到迅速推廣使用,其采集圖像的過程可概括為:光源照明條件下,數字攝像機拍攝目標物體后將圖像信號轉變成光電信號,通過串行接口傳輸到計算機進行處理。
在放射治療過程中,可通過計算機視覺技術實時獲取患者體表標記物的三維空間坐標,將信息傳遞給反向跟蹤平臺系統,實時監測人體在治療過程中的位置變化情況,視覺實時測量系統見圖1。
1.3 計算機視覺系統下最佳體表標記位置
臨床中最常采用在患者體表設置標記的方式,以保證預測腫瘤位置的準確性及患者放射治療體位的可重復性,且標記的位置多根據經驗選擇。為實現智能地選擇與腫瘤位置具有最佳相關性的體表標記位置,Miandoab等[12]使用典型相關分析(canonical correlation analysis,CCA)和主成分分析(principal component analysis,PCA)兩種輸入算法,與自適應神經模糊推理系統(adaptive network-based fuzzy inference system,ANFIS)結合,制作出相關模型,輸出患者定位信息。結果表明,以上兩種輸入算法能合理地從給定區域選擇與腫瘤位置具有最佳相關性的體表標記位置。

圖1 視覺實時測量系統框圖
2 計算機視覺系統測量精度研究
目前,用于監測放射治療過程中患者位置變化的計算機視覺系統測量精度已基本能達到亞毫米級,常見的計算機視覺系統在測量精度方面的研究有Kinect攝像機、RGB-D攝像機、Madibreast系統及Catalyst光學系統等。
2.1 Kinect攝像機
為實時監控患者移動狀況并幫助其重新定位,有學者應用微軟公司旗下的Kinect攝像機對患者定位及呼吸觸發情況進行深入研究。其中,Rihana等[13]應用基于2臺Kinect攝像機的視覺放射治療(vision radiation therapy,VRT)系統,利用其可同步產生彩色及深度數據信息的特點,分別對靜態模體、動態模體進行測量,評估Kinect檢測患者呼吸信號的能力。研究顯示,Kinect攝像機測量距離其800~1000 mm的物體誤差<1 mm。同時,其檢測到的呼吸信號與目前臨床常用設備Alice6檢測到信號的相似度達85%。Kinect具有構建患者表面三維視圖和實時監控運動的功能。Kinect攝像機構成見圖2。

圖2 Kinect攝像機結構示意圖
2.2 RGB-D攝像機
與臨床常用的減少擺位誤差的屏氣技術、X射線透視及呼吸門控技術等相比,RGB-D攝像機無需接觸患者即可提供目標表面的實時深度信息,并可將該信息用于呼吸運動測量。Wijenayake等[14]基于此提出了新的呼吸運動跟蹤方法:通過RGB-D攝像機連續捕獲患者胸壁的深度圖像,利用PCA創建患者呼吸運動模型,以消除輸入深度數據的空間和時間噪聲。然后利用從RGB-D攝像機獲取的深度數據實時測量外部呼吸運動,精度可達0.5 mm。此外,引入一種基于標記的深度配準技術,將測量區域限制在與解剖學上一致的區域,幫助處理治療期間患者的運動。為分析所提出方法的運動,將其與傳統肺活量計對比,相關系數為0.97,與以高精度著稱的激光線掃描技術對比,平均誤差僅為0.53 mm,測量精度效果相當。研究表明,與基于標記的方法對比,RGB-D攝像機空間分辨率高且提供整個目標表面的深度信息,不僅可測量整個胸壁運動,還可測量區域運動,未來有望應用該模型描述內部腫瘤的運動。
2.3 Madibreast系統
Leduc等[15]設計一套基于計算機視覺的呼吸監測和處理系統,稱為Madibreast,其圖像分辨率在4 m內可實現實時亞毫米級。該系統選用2臺攝像機,將攝像機1設置于患者側面,監視乳房外部的前后運動和上下運動;攝像機2設置于天花板,監視乳房前表面的左右運動和上下運動。為保證直線加速器的手臂正常轉動,所有攝像機的位置均需距離患者至少2~3 m。Madibreast系統見圖3。

圖3 Madibreast系統示意圖
Leduc等[15]利用開源計算機視覺庫(open computer vision library,Open CV)開發一套光學跟蹤系統。系統由基于計算機視覺算法的特定軟件驅動,可光學跟蹤高對比度標記,并在用戶界面顯示實時運動和數據。為驗證Madibreast系統的空間和時間準確性,研究者設計一個可模擬各種范圍胸部運動的機械模型,然后通過在模型和志愿者乳房上設置高對比度標記,對不同呼吸模式下Madibreast系統的跟蹤精度進行驗證。
數據顯示,志愿者乳房皮膚前后運動與上下運動存在明顯差異。盡管正常呼吸模式的運動差異<1 mm,但呼吸困難模式的運動差異最大為4 mm。Madibreast系統可跟蹤乳房不同位置上以各種幅度和呼吸頻率運動的標記,通過直觀地顯示標記的即時軌跡實時監控,及時糾正位移偏差,顯示出0.5 mm的精度和可接受的潛伏期(延遲時間<100 ms)。Madibreast系統還可在皮膚上設置多個標記,以增加標記與實際腫瘤位置的相關性。
該系統的局限性在于當光照不足以及呼吸模式非常快時,跟蹤就會失敗。此外,延遲時間會隨著CPU占用的增加而增加。
2.4 Catalyst光學系統
Catalyst光學系統是使用可見光投影儀和CCD相機的一種新型掃描設備,安裝于直線加速器治療臺腳底上方的天花板,通過3個LED將波長為405 nm(藍色),528 nm(綠色)和624 nm(紅色)的光投射到患者體表。其中,藍光為掃描患者的測量光,系統通過藍光檢測出患者的局部位移后,將位移結果以綠光、紅光的形式直接投影到患者體表,用于顯示實際掃描與參考掃描不匹配的位移區域,直觀展現患者的位移偏差。該系統同時具有監視功能,可檢測患者在治療過程中的呼吸運動。Catalyst光學系統見圖4。
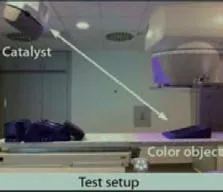
圖4 Catalyst光學系統示意圖
Stieler等[11]在帶有錐形束X射線計算機斷層掃描(cone-beam computed tomography,CBCT)的直線加速器室,額外安裝一套Catalyst光學系統,將基于Catalyst光學系統表面匹配的患者定位數據與基于CBCT匹配的患者定位數據進行比較,驗證Catalyst光學系統的掃描質量及可重復性,對其臨床性能進行評估。CBCT和Catalyst測量所得數據間的總體平均偏差保持在1.5 mm和0.4 °以內,標準偏差在4 mm和1.7 °以內,所有患者Catalyst位移與CBCT測量的偏差≤1 cm。
在體位可重復性上,Catalyst光學系統與CBCT具有較好一致性。Catalyst還能在不影響放射治療的同時對患者的整個治療過程進行監測,CBCT只能在每次治療前進行位置修正,治療過程中無法做到實時監測。臨床應用中,可引入Catalyst光學系統以減少CBCT的掃描頻率,且Catalyst的監視功能還能使分次定位誤差最小化。
2.5 其他檢測患者外部運動的計算機視覺系統
Barbés等[16]利用2臺攝像機拍攝二維平面圖像,組建三維視覺空間,獲得空間點的三維位置信息,以此開發并測試一套定位和跟蹤空間中的點的新系統,可自動測量物體表面所設立標志物的三維空間坐標,并監測標志物的線性和旋轉位移軌跡。如跟蹤患者體表一個或多個區域的運動,只需在區域上粘貼標記并啟動程序,用該系統測量標記的位移,并計算實際位置和測量位置之間的差異。
Barbés等[16]應用該系統跟蹤患者體表的461個點,顯示其在三維空間方向上的跟蹤誤差<0.3 mm。同時,監測周期性運動的精度達0.5 mm,旋轉運動速度達11.5 cm/s,跟蹤呼吸運動的精確度類似于其他更復雜的商業系統,且在操作上不會增加治療時間及患者不適感。該系統可跟蹤身體任何部位的平移和旋轉運動,跟蹤點的數量不受限,校準過程簡單快捷,約1 min,如移動攝像機只需重新校準即可。
目前,該系統的可靠性和準確性已得到開發者驗證,并在臨床應用中被證實其對于實施放射治療的實時質量控制是有效的,可在放射治療過程中檢測患者位置偏差情況,如偏差超過某固定閾值則會發出警告,提醒操作者,如檢測到較大幅度的運動,可觸發直線加速器停止放射。
2.6 計算機視覺系統的準確性研究
Belcher等[17]設計制作一個能由6個自由度(6 degree of freedom,6DOF)運動的機械平臺,可在6DOF工作空間內進行亞毫米及亞度精度的運動,利用該平臺驗證常用的計算機視覺跟蹤系統的準確性。平臺在6DOF空間的運動軌跡是預知的,將模體固定在平臺上,利用計算機視覺系統對模體6DOF位置進行跟蹤,將計算機視覺系統測得的模體的位置坐標與平臺預先設定好的位置坐標進行比較,結果顯示,計算機視覺系統6DOF位置跟蹤最大均方根誤差沿X軸、Y軸和Z軸平移分別為0.46 mm、0.60 mm和0.54 mm;繞X軸、Y軸和Z軸旋轉分別為0.06 °、0.11 °和0.08 °。基于此水平的平移和旋轉精度,所觀察到的計算機視覺系統可能在亞毫米和亞度級別對放射治療患者的運動進行有效監控。
3 計算機視覺系統與AI技術
AI是研究在計算機環境下模擬及延伸人的智能行為的技術,以多種智能技術為基礎。計算機視覺可視為AI的一個分支,屬于模擬人類感知行為的應用研究,即計算機視覺系統的發展可歸屬于AI應用的發展。傳統的AI智能的實現依賴于邏輯符號模擬人腦邏輯思維,而計算機視覺系統是通過數字信息或概率統計技術識別物體,模擬人的視覺功能[18-19]。視覺計算理論的基礎包括AI理論,AI的發展離不開計算機科學技術的發展,兩者相輔相成,共同促進計算機視覺系統向更加實用及復雜的技術研究進展[18]。
計算機視覺系統作為AI中相對獨立的功能模塊,大部分尚未充分發揮智能監控作用,若將AI技術更多應用于現有的計算機視覺系統,使之更加智能,預計將更明顯的提升監控效果,減少安全隱患及人力物力消耗[19]。但目前對AI的研究尚處于初級階段,在醫學領域的應用仍較少,計算機智能視覺系統面臨許多待解決的難題,需更多研究和探索打破其技術困境和局限性。
4 討論與展望
擺位重復性是對腫瘤放射治療準確性和安全性的挑戰。目前,市場上用于擺位驗證與校準的各種商業系統費用較為昂貴,計算機視覺系統可突破醫院臨床放射治療中心的設備硬件及人員技術等條件限制,為不具備圖像引導設備的醫院提供擺位驗證服務。醫院也可在原有驗證設備基礎上附加一套計算機視覺系統,實現雙重保障,達成更直觀的擺位驗證及校準,還可實時監測記錄腫瘤隨呼吸運動的位移情況,為靶區擺位擴邊提供數據參考。
在放射治療過程中運用計算機視覺系統進行患者體位運動監測具有下列優點:①系統結構簡單,測量裝置易于移動和重新校準,靈活性及便攜性強;②與X射線計算機斷層掃描和磁共振成像技術相比,患者接收額外劑量的輻射減少;③可實時獲取患者體表位置信息,精度高;④非接觸式光學方法,無創且成本低,數據收集不引起患者的任何不適,無跟蹤時間限制,即不延誤治療也不干擾患者周圍的物體,為患者提供舒適高效的治療,便于臨床推廣應用。
目前,AI理論已逐步應用于實踐,在醫療領域的應用成果不斷,但仍存在如下問題:①計算模型算法存在冗余,需不斷改進算法以求更簡便、快速及精確;②測量工具存在微小硬件誤差或小運動,導致可用方案之間存在差異;③能測量1個表面6DOF的系統較少;④與AI技術結合不足。
隨著科技進步、計算機和電子技術的發展,結合AI的研究成果和經驗,計算機視覺系統的理論框架將進一步完善,其分辨率、圖像處理能力和分析能力等將不斷增強,在臨床實際應用中發揮更大作用,AI也會更好為人類服務。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
小學科學(學生版)(2021年7期)2021-07-28 06:44:42
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
科技傳播(2019年22期)2020-01-14 03:06:34
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
消費導刊(2017年20期)2018-01-03 06:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45
